

用于SLAM的神经隐含可扩展编码
描述
摘要
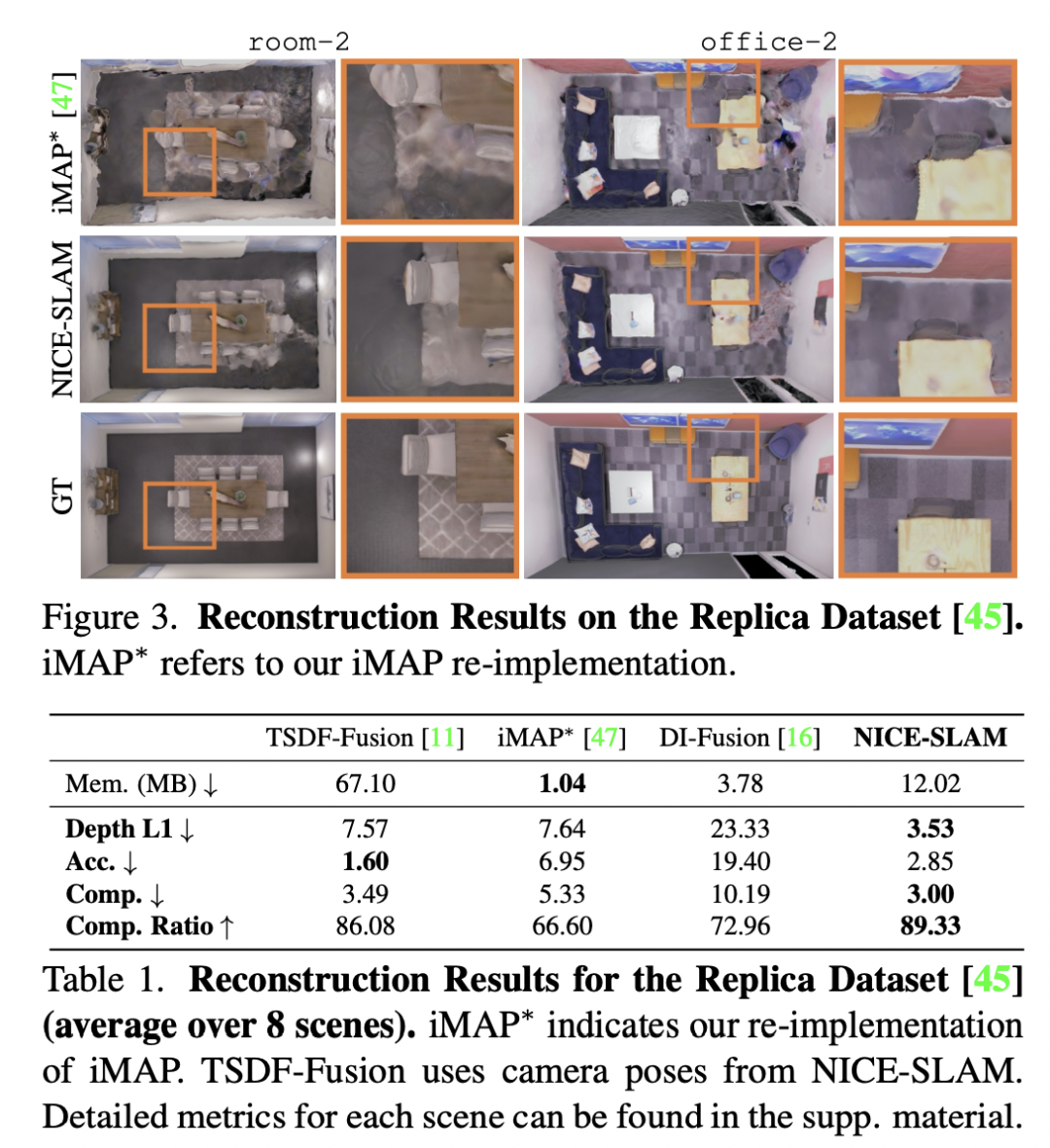
最近,神经隐含表征在各个领域显示出令人鼓舞的结果,包括在同步定位和映射(SLAM)方面取得的可喜进展。然而,现有的方法产生了过度平滑的场景重建,并且难以扩展到大场景。这些限制主要是由于其简单的全连接网络结构,没有将局部信息纳入观察范围。
在本文中,我们提出了NICE-SLAM,这是一个密集的SLAM系统,通过引入分层的场景表示,纳入了多层次的本地信息。用预先训练好的几何先验来优化这个表示,可以在大的室内场景中进行详细的重建。与最近的神经隐含SLAM系统相比,我们的方法更具可扩展性、效率和鲁棒性。在五个具有挑战性的数据集上进行的实验表明,NICE-SLAM在映射和跟踪质量方面都具有竞争力。
主要贡献
我们提出了NICE-SLAM,一个密集的RGB-DSLAM系统,它具有实时性、可扩展性、预测性和对各种挑战性场景的鲁棒性。
NICE-SLAM的核心是一个分层的、基于网格的神经隐式编码。与全局神经场景编码相比,这种表示法允许局部更新,这是大规模方法的一个先决条件。
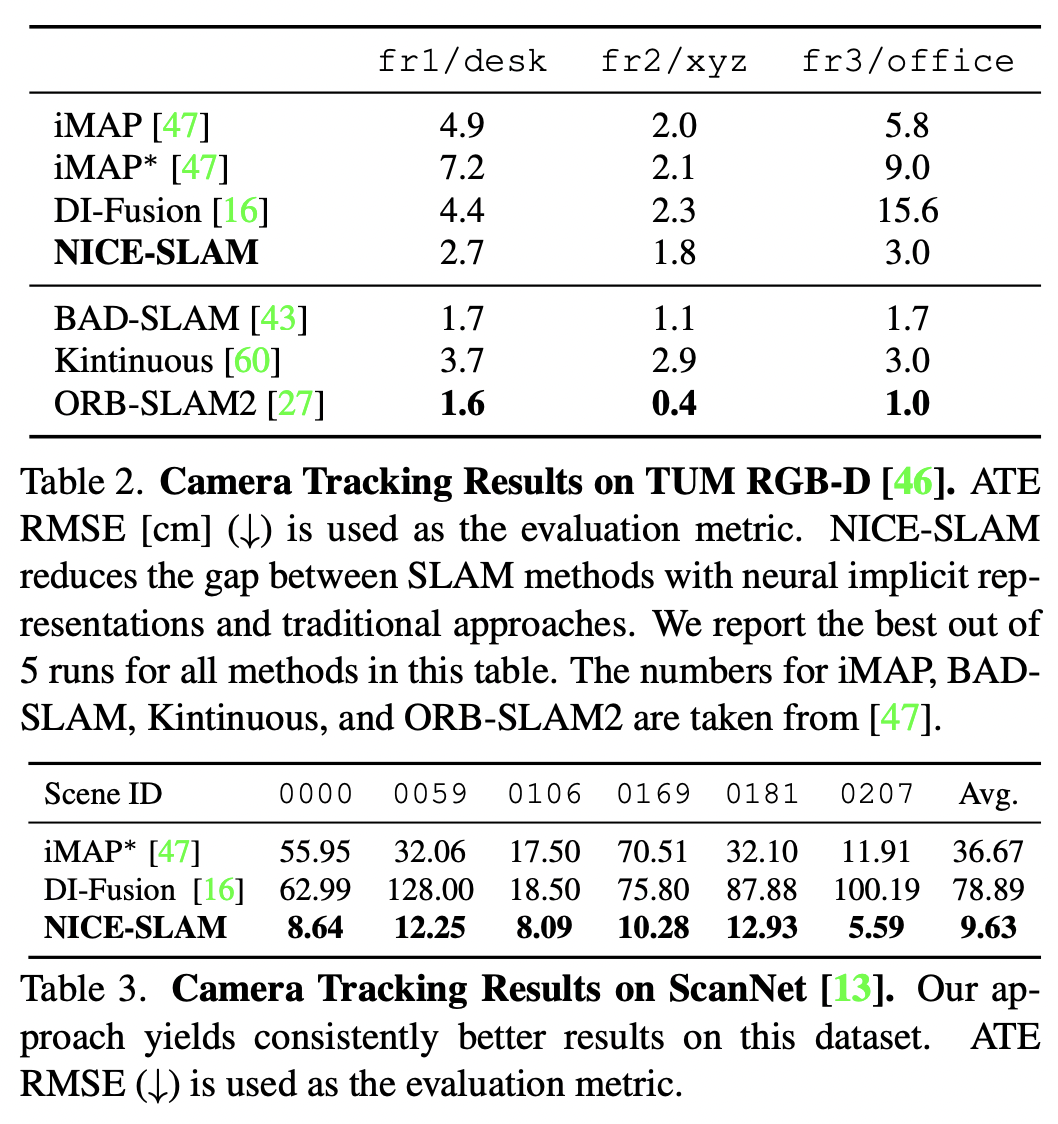
我们在各种数据集上进行了广泛的评估,证明了在映射和跟踪方面具有竞争力的性能。
主要方法
我们的方法将RGB-D图像流作为输入,并以分层特征网格的形式输出摄像机的姿势和学习到的场景表示。从右到左,我们的管道可以被解释为一个生成模型,它根据给定的场景表示和摄像机姿势渲染深度和颜色图像。在测试时,我们通过逆向传播图像和深度重建损失来解决逆向问题,并通过可区分的渲染器(从左到右)来估计场景表现和摄像机的姿势。
这两个实体都是在交替优化中估计的。映射:逆传播只更新层次化的场景表示。跟踪:逆传播只更新摄像机的姿态。为了提高可读性,我们将用于几何编码的细尺度网格与同等大小的颜色网格结合起来,并将它们显示为具有两个属性(红色和橙色)的一个网格。
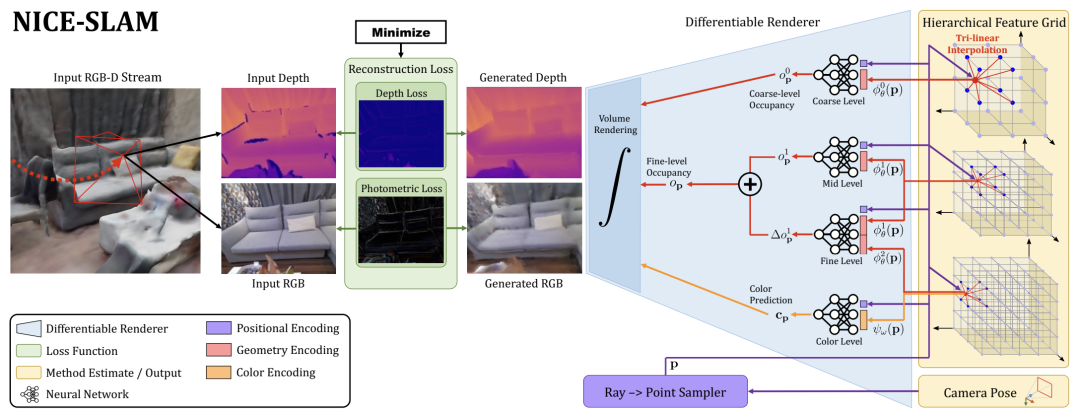
1. 层次化的场景表示
现在我们介绍一下我们的分层场景表示,它结合了多级网格特征和预训练的解码器,用于占用率预测。几何图形被编码成三个特征网格j l θ和它们相应的MLP解码器f l,其中l∈{0,1,2}是指粗、中、细三级场景细节。此外,我们还有一个单一的特征网格ψω和解码器gω来模拟场景外观。这里θ和ω表示几何和颜色的可优化参数,即网格中的特征和颜色解码器中的权重。
2. 深度和色彩渲染
给定相机的固有参数和当前相机的姿势,我们可以计算出一个像素坐标的观察方向r。我们首先沿着这条射线对Nstrat点进行分层采样,同时对靠近深度的Nimp点进行均匀采样1。
我们对每条射线总共取样N=Nstrat+Nimp点。更正式地说,让pi = o + dir, i∈ {1, - -, N}表示给定摄像机原点o的射线r上的采样点,di对应于pi沿该射线的深度值。对于每一个点pi,我们可以计算出它们的粗粒度占用概率o0 pi,细粒度占用概率opi,和颜色值cpi。
最后,对于每条射线,在粗略和精细层面的深度,以及颜色可以被呈现为:



3. 建图和跟踪
建图。
为了优化上文提到的场景表示,我们从当前帧和选定的关键帧中均匀地取样共M个像素。接下来,我们以分阶段的方式进行优化,以最小化几何和光度损失。
几何损失仅仅是观测值和预测深度之间的L1损失,在粗略的或精细的水平上为:
光度损失为:
相机跟踪。
除了优化场景表示外,我们还平行运行摄像机跟踪,以优化当前帧的摄像机姿势,即旋转和平移{R,t}。为此,我们对当前帧中的Mt像素进行采样,并应用上面相同的光度损失,但使用一个修改过的几何损失:
修改后的损失在重建的几何形状中减少了某些区域的权重,例如物体的边缘。摄像机跟踪最终被表述为以下最小化问题:

4. 关键帧的选择 与其他SLAM系统类似
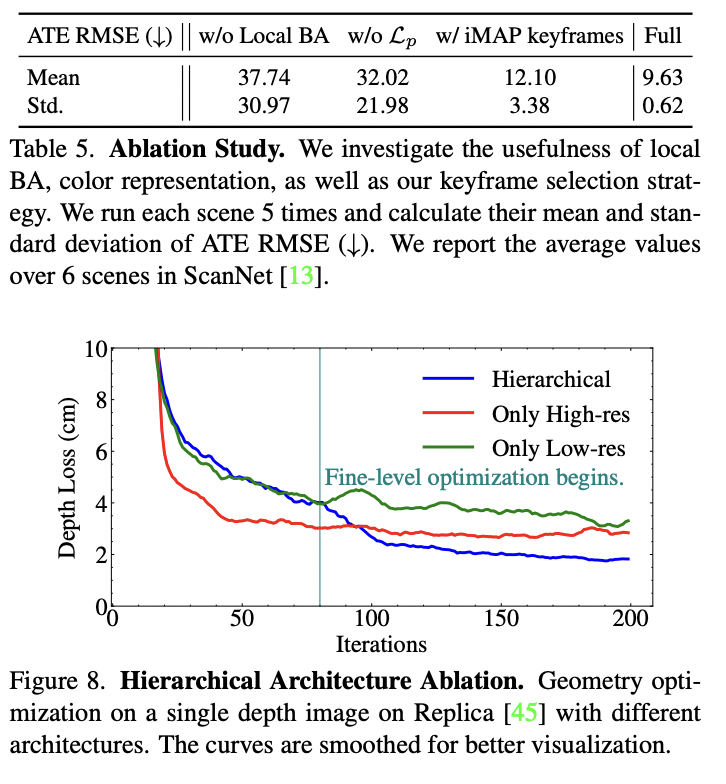
我们用一组选定的关键帧不断优化我们的分层场景表示。我们按照iMAP的方法维护一个全局关键帧列表,我们根据信息增益逐步添加新的关键帧。然而,与iMAP相比,我们在优化场景几何时只包括与当前帧有视觉重叠的关键帧。这是可能的,因为我们能够对我们的基于网格的表示进行局部更新,而且我们不会像iMap那样存在关键帧消失的问题。
这种关键帧选择策略不仅确保了当前视图之外的几何形状保持静态,而且还导致了一个非常有效的优化问题,因为我们每次只优化必要的参数。在实践中,我们首先随机地对像素进行采样,并使用优化后的相机姿势对相应的深度进行反投影。
然后,我们将点云投影到全局关键帧列表中的每个关键帧。从这些有点投射到的关键帧中,我们随机选择K-2帧。此外,我们还将最近的关键帧和当前的帧包括在场景表示优化中,形成总共K个活动帧。
主要结果
审核编辑:刘清
-
动态环境中基于神经隐式表示的RGB-D SLAM2024-01-17 1976
-
SLAM技术的应用及发展现状2018-12-06 15565
-
让机器人完美建图的SLAM 3.0到底是何方神圣?2019-01-21 6012
-
【案例分享】基于BP算法的前馈神经网络2019-07-21 3406
-
SLAM技术目前主要应用在哪些领域2020-12-01 3355
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4737
-
单目视觉SLAM仿真系统的设计与实现2009-04-15 1183
-
可扩展应用与可扩展系统2011-05-30 1108
-
基于可扩展编码的多视角视频编码研究2011-09-26 1034
-
57682543slam_code2016-03-22 1061
-
【人工神经网络基础】为什么神经网络选择了“深度”?2018-09-06 1012
-
谷歌全新操作系统Android Q Beta 1发布 可扩展神经网络API2019-03-17 3206
-
用于神经场SLAM的矢量化对象建图2023-06-15 1897
-
视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读2023-09-05 5894
-
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!2023-12-26 2367
全部0条评论

快来发表一下你的评论吧 !
