

CAN FD通信的数据段错误500Kbps还是2Mbps?
通信网络
描述
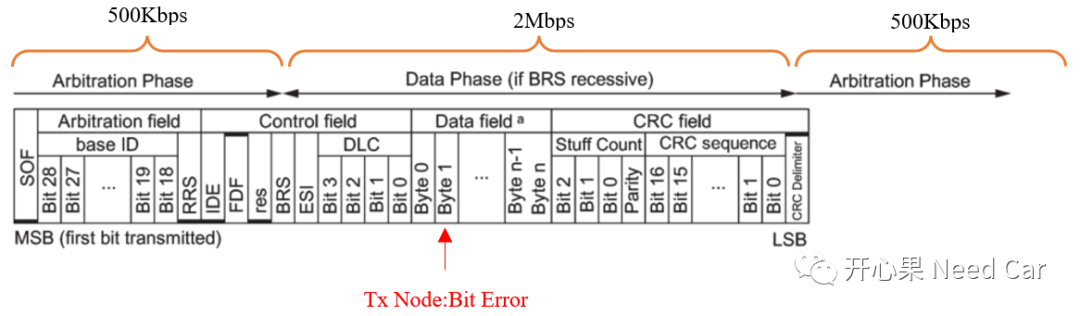
如标题,使用CAN FD格式报文进行通信,假设:仲裁段速率500Kbps,数据段速率2Mbps。当发送节点在数据段出现位错误时(eg:Bit Error,位错误),接下来发送的错误帧速率是继续2Mbps还是切换到500Kbps呢?举例:如下图,发送节点发送一帧CAN FD报文,发送数据段Byte1的某个Bit时,发现了Bit Error(发送的Bit值与回采的Bit值不一致),接下来,发送节点发送错误帧,错误帧的速率是500Kbps还是2Mbps呢?
如上的问题源于群内小伙伴的讨论,个人觉得这个问题很好,很细节,也很值得思考。本问题的起点源于错误帧,关于错误帧,可以参考前文CAN通信基础:错误帧。
1、问题剖析
如下图,假设Tx Node此时正在发送数据段(2Mbps)数据,在T1时刻,Tx Node识别到Bit Error,且Tx Node处于Error Active状态,此时的Tx Node需要发送主动错误帧。T2时刻,Rx Node识别到Fill Error,即:不满足11898规范要求的填充规则(每5个相同的Bit,插入一个反向Bit,eg:000001、111110),Rx Node识别到错误以后,也需要发送错误帧,假设Rx Node处于Error Active。
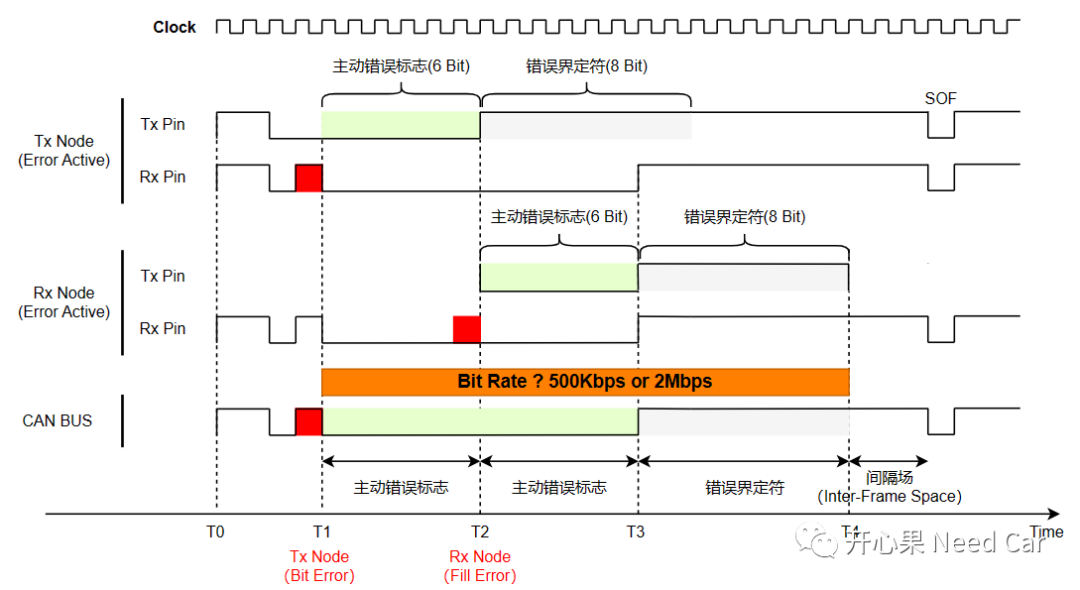
细化问题:在T1~T4区间,错误帧的速率是500Kbps还是2Mbps?
回答这个问题,我最先想确认11898规范中是否有答案,我没有找到,如果读到此处的你已找到,还请告知。虽然在11898中,我没有找到答案,在芯片手册中(英飞凌TC3xx,其他芯片,读者自行查阅),找到了对应的解释,如下所示:

解释:Tx Node发送CAN FD报文,发送高速数据段时(2Mbit),检测到错误,速率切回Norminal Bit Rate(500Kbps),不用等到CRC界定符位置再切换500kbps。也就是说,Tx Node识别到Bit Error,紧接着以500Kbps的速率发送错误帧,而接收节点不管是以500Kbps速率接收还是2Mbps速率接收,均能识别到Fill Error,之后,Rx Node也会以500Kbps速率发送错误帧。如上,即是本文答案。 提示:一个CAN网段内,一般有多个CAN节点,很可能一些节点支持CAN FD格式报文,一些节点不支持CAN FD格式报文,为了兼容非CAN FD节点,且让这些节点识别到错误帧,错误帧的速率设计为500kbps更合理。
编辑:黄飞
- 相关推荐
- 热点推荐
- CAN
-
MAX3050/MAX3057:±80V故障保护的2Mbps低功耗CAN收发器2026-01-27 466
-
TCAN1463-Q1汽车级高速CAN FD收发器技术解析与应用指南2025-09-11 1358
-
MAX14853/MAX14855 500kbps/25Mbps、全双工RS-485/RS-422收发器技术手册2025-06-04 2121
-
MAX3053 ±80V故障保护、2Mbps、低电源电流CAN收发器技术手册2025-05-27 1446
-
Flexcan CAN0无法以500kbps以上的速率发送消息怎么解决?2025-04-08 1262
-
具有±8kV IEC ESD保护功能的THVD1500 500kbps RS-485收发器数据表2024-06-24 562
-
如何使用DSLogic分析CAN/CAN-FD 信号?2024-01-08 3485
-
最适合CAN FD的共模滤波器2023-08-22 3857
-
如何在LPC1768中将CAN波特率设置为666.666 kbps?2023-04-10 621
-
请问esp32 c3 BLE模式2Mbps/1Mbps/500kbps/125kbps有定频相关软件吗?2023-03-13 569
-
如何解决车载CAN到CAN FD的升级困扰2022-04-25 6397
-
TDK CAN FD用共模滤波器ACT1210D系列的介绍2021-11-22 5552
-
需要更快的速度CAN FD2018-09-17 2873
-
请教关于ADUM5421通信速率问题2018-08-10 2334
全部0条评论

快来发表一下你的评论吧 !
