

KUKA机器人提前运行指针的作用是什么?
工业控制
描述
什么是电脑提前运行?
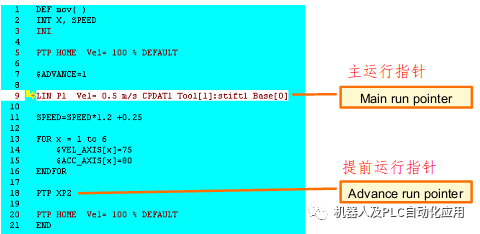
程序运行时可以在图形用户界面上看到的主运行指针(白条)始终指示当前正在处理的块。另一方面,提前运行指针不可见,并且在主运行指针之前三个运动块(默认设置)。
提前运行指针的作用是什么?
为了能够计算路径,例如 对于近似运动,需要使用提前运行指针读取路径规划数据。然而,不仅要处理运动数据,还要处理用于控制外围设备的算术数据和命令。
提前运行指针是如何受到影响的?
影响外围设备的指令和数据(例如输入/输出指令)会触发提前运行停止。如果提前运行指针停止,则无法进行近似定位。
变量 $ADVANCE 指定提前运行可以在程序指针之前处理的最大运动块数。然而,实际提前运行取决于计算机的容量。
$ADVANCE = Value
0=不可能近似,每个点都准确定位
1=允许近似的最小值
3=默认
5=最大值
影响外围设备的指令和数据(例如 I/O 指令),或基于机器人当前状态的指令和数据,会触发提前运行停止。这是必要的,以保证语句和机器人运动的正确顺序。
声明:HALT ,WAIT ,PULSE,ANIN ON/OFF, ANOUT ON/OFF
系统变量:$IN[x], $OUT[x],$ANIN[x] ,$ANOUT[x]
导入的变量:全部,访问时
可以在文档中找到触发自动提前运行停止的完整命令表(请参阅文档 CD)
CONTINUE
在应防止这种提前运行停止的应用中,必须在相关指令之前立即编写命令 CONTINUE。然后控制器允许提前运行继续。此命令的作用仅限于下一个程序行(即使此行为空!!)。
条件或赋值由提前运行指针轮询,但仍然可以逼近前一点
DEF EXIT_PRO ( )
...
PTP XP9 C_PTP
CONTINUE
WAIT FOR $IN[14] == TRUE
...
编辑:黄飞
-
KUKA机器人编程说明(英文)2025-03-07 472
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3857
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1741
-
焊接机器人的外部轴的作用是什么?2023-02-15 1616
-
KUKA机器人伺服驱动模块维修2021-09-17 1853
-
库卡机器人MGV电源模块维修2021-09-08 1830
-
工业机器人组成结构相关资料分享2021-07-05 2685
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7989
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10875
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12334
-
KUKA机器人问题解答2019-07-15 2594
-
求KUKA机器人控制柜三维模型2016-04-18 6422
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2253
-
KUKA重型机器人2015-02-03 8271
全部0条评论

快来发表一下你的评论吧 !
