

应用最新的CAN总线增强功能,实现安全可靠的高速汽车通信
描述
多年来,设计人员一直依靠控制器局域网 (CAN) 在汽车的各个子系统和电子控制单元 (ECU) 之间进行可靠的通信。然而,随着板载网络节点数量的增加,所需的数据吞吐量以及对更低延迟和更高级安全性的需求也在增加,所有这些都在严格的尺寸、重量和成本限制内完成。尽管如此,许多设计人员还是不愿意改变网络拓扑结构,而且由于CAN规范和相关IC解决方案的稳步改进,他们不必这样做。
迁移到另一种网络拓扑很困难,因为会损失先前的投资,并且随着设计人员的学习曲线向上移动,可能会出现设计延迟。但是,通过再次查看CAN规范增强功能可以避免这种情况,例如用于更高吞吐量的CAN灵活数据速率(FD),使用部分网络等技术来处理泄漏和干扰,使用更严格的时序裕量来确保更高数据速率下的可靠通信,以及增强的安全性。
此外,CAN收发器供应商本身也通过集成度更高的解决方案来响应设计要求,这些解决方案结合了CAN增强功能,以更好地服务于高级驾驶辅助系统(ADAS)、动力总成和信息娱乐等新兴应用。
本文简要讨论了CAN及其增强功能,包括设计人员如何管理向更高级迭代(如CAN FD)的过渡。在此过程中,它将介绍合适的CAN解决方案以及如何使用它们来实现更快的数据速率,更高的可靠性和更高的安全性。
CAN灵活的数据速率
随着车辆现在有更多的电子设备,设计人员需要更高的性能,但与其转移到完全不同的网络,不如利用CAN增强功能,从CAN FD开始。这提供了高达5 Mbits/s的速率,而ISO 1标准中定义的原始CAN规范的速率为11898 Mbit/s(最大值)。这种数据速率限制迫使汽车设计人员在车内添加更多的CAN网络设备和连接,不可避免地导致更多的布线、功率损耗和重量。
CAN FD标准解决了带宽难题,同时在标称条件下将数据速率提高到2 Mbits/s,在编程模式下将数据速率提高到5 Mbits/s。这一主要的 CAN 增强功能改进了帧速率,将数据字段从 8 字节增加到 64 字节,以便更有效地支持数据密集型应用(图 1)。
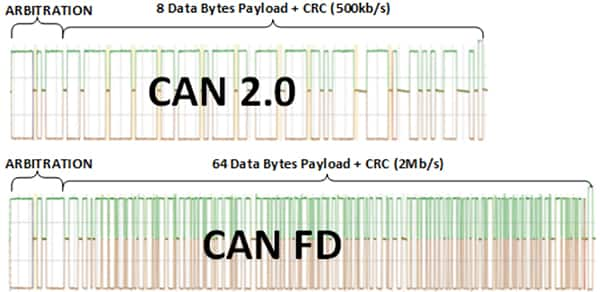
图 1:2012 年更新的 CAN FD 标准将有效负载中的最大数据字节数从 8 字节扩展到 64 字节。(图片来源:微芯科技)
从经典CAN过渡到CAN FD
随着摄像头和传感器(包括高级驾驶辅助系统(ADAS))的增加,通过车载网络传输的数据量不断增加。虽然更高速的CAN FD网络可以提供帮助,但它们在开发过程中确实需要更高的精度。例如,在更高的数据速度下,稳定位值的可用裕量会迅速缩小,从而增加了出错的可能性并破坏了CAN的固有可靠性。
CAN网络内的高速数据传输还可能产生干扰漏电流等问题。此外,在实施经典CAN的同时实施CAN FD系统在确保不会因混合网络安排而引入错误方面提出了重大挑战。
为了帮助解决其中一些问题,[Microchip Technology]推出了[MCP2561/2FD]高速CAN收发器。该器件提供与其前代产品 [MCP2561/2] 相同的内核特性,但增加了有保证的环路延迟对称性,以支持 CAN FD 所需的更高数据速率(图 2)。这反过来又减少了最大传播延迟,以便在CAN总线上支持更长的网络连接和更多的节点。具体而言,MCP2561/2FD CAN收发器的最大传播延迟为120纳秒(ns)。
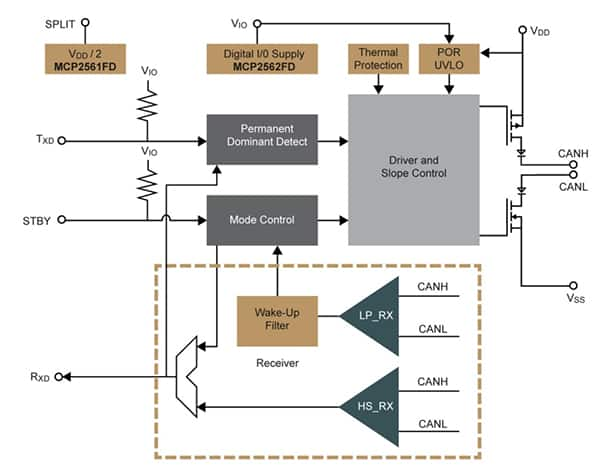
图 2:MCP2561/2FD CAN 收发器具有保证的环路对称性,可在 CAN 总线上实现更长的网络连接和更多节点。(图片来源:微芯科技)
Microchip和其他CAN收发器供应商也在实施符合ISO 11898-2:2016标准的部分网络机制。部分联网通过支持选择性唤醒功能和自主总线偏置,确保从经典CAN系统平稳过渡到更高速的CAN FD系统。
例如,[恩智浦半导体的][TJA1145]高速CAN收发器支持高达2 Mbits/s的数据速率,并通过称为FD Passive的选择性唤醒功能集成部分网络。它允许不需要通信CAN FD消息的常规CAN控制器在CAN FD通信期间保持睡眠/待机模式,而不会产生总线错误。
最终,所有CAN控制器都将被要求符合高速CAN总线标准,将所有CAN总线节点转换为FD有源节点。但在此之前,部分网络将弥合经典CAN和CAN FD世界之间的差距。
恩智浦还提供CAN FD Shield技术,该技术使用高精度振荡器动态过滤CAN FD报文。与部分联网一样,采用FD Shield功能的CAN收发器可直接替代现有收发器,因此不需要更改软件。恩智浦已经完成了对采用汽车开放系统架构(AUTOSAR)的FD Shield技术的评估,并将样品提供给主要的汽车OEM和一级供应商。
使用较小的CAN收发器提供总线保护
Along with faster data rates, designers can take advantage of highly integrated CAN solutions that reduce the BOM cost and board space. However, the devices are often near each other as well as other sensitive electronics, so care must be taken that they don’t cause interference, or become susceptible to interference, so electromagnetic interference (EMI) and noise immunity are important characteristics. Often CAN transceivers use discrete filters, common-mode chokes and transient voltage suppression (TVS) devices to counter the ESD and EMI-centric problems.
For more on the important topic of TVS for CAN bus, see “Design-In TVS Diode Protection to Enhance CAN Bus Reliability.”
However, automotive designers are increasingly looking for ways to reduce weight and cost in CAN-based designs. For example, the [TCAN1042]and [TCAN1051] transceivers from [Texas Instruments] have removed the choke to reduce the component count while still complying with strict noise immunity requirements (Figure 3).
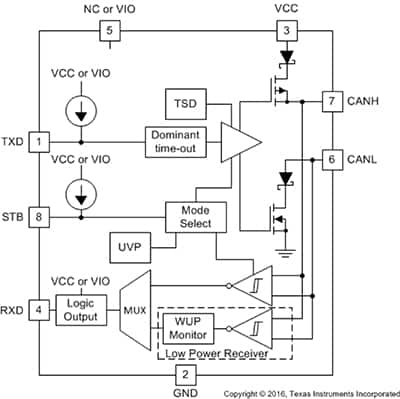
Figure 3: The TCAN1042 CAN transceiver provides protection features to enhance CAN robustness and is used in applications such as automotive HVAC control modules and RF smart remote controls. (Image source: Texas Instruments)
The protection against high bus fault and electrostatic discharge (ESD) is crucial in CAN systems which are now catering to 12 volt, 24 volt, and 48 volt battery requirements in vehicles, as well as 24 volt industrial power supplies. It guards CAN bus pins against short-to-DC voltages with better matching of the output signals.
The TCAN1042 and TCAN1051 transceivers provide ESD protection of up to ±15 kilovolts (kV), which potentially eliminates the need for external TVS diodes. Also, designers can quickly and easily evaluate the performance of these CAN transceivers with an evaluation module, the [TCAN1042DEVM], which also provides information on CAN bus termination, CAN bus filtering, and protection concepts.
CAN的下一个前沿领域:安全
用于连接ECU的基于CAN的车载网络相对简单易用。但是,安全性受到损害的单个ECU可能会使整个车辆容易受到黑客攻击。保护CAN通信的一个广为人知的选项是基于采用加密和复杂密钥管理的消息身份验证代码(MAC)机制。但是,CAN报文加密会增加CAN总线负载、报文延迟和功耗。由于当前安装的CAN控制器缺乏计算能力,升级车载网络以实现安全CAN通信也存在困难。
最新的CAN收发器具有更简单的机制,可规避带宽开销、延迟和处理负载。这些安全CAN收发器可以过滤消息ID,因此,如果受损ECU尝试发送最初未分配给它的ID的消息,则收发器可以拒绝将其传输到CAN总线(图4)。除了防止欺骗企图外,CAN收发器还可以通过使来自受感染ECU的消息无效来防止篡改和泛洪攻击。
[较新的收发器过滤消息 ID 的图示]
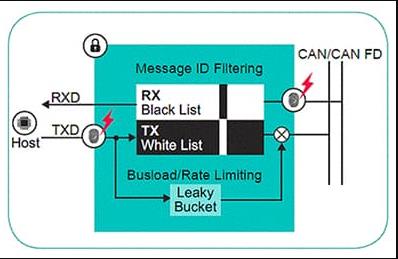
图 4:为了在保护 CAN 网络的同时降低延迟和带宽要求,更新的收发器正在过滤消息 ID。 (图片来源:恩智浦半导体)
这些CAN收发器无需使用加密技术即可提供针对泛洪、欺骗和篡改的安全性。如果消息在总线上失效并带有活动错误标志,他们可以检测到网络事件。接下来,安全CAN收发器暂时断开本地主机与CAN总线的连接。
但是,如果未检测到安全威胁,CAN收发器的作用类似于标准高速CAN收发器。换句话说,这些安全CAN收发器可以直接替代类似封装中的标准CAN收发器。
像恩智浦这样的供应商正在做的是完全在硬件中实现安全功能,允许CAN收发器安全操作独立于CAN控制器执行。这反过来又避免了对ECU进行软件更改的需要以及ECU操作中断的相关风险。
此外,安全CAN收发器保留日志,用于报告总线上的安全事件。这些CAN收发器还可以保护自己的配置更新,因此可以充当入侵检测系统。
结论
CAN总线始于1983年,但正如本文所示,它已经很好地适应了汽车电子设计师的通信要求。首先,CAN收发器正在经历向更高速CAN FD网络的过渡。其次,CAN收发器通过消除共模扼流圈和TVS二极管等外部元件,提高了可靠性,同时降低了BOM成本和设计尺寸。最后,CAN收发器通过将安全功能嵌入收发器硬件,在保护CAN总线方面发挥着作用。后者不仅确保了CAN总线,而且确保了联网汽车的未来。
-
基于DSP的高低速CAN总线汽车控制系统设计2009-10-06 4078
-
汽车CAN总线技术2015-06-24 4343
-
汽车电子CAN总线网络与标准2015-07-08 2764
-
【Aworks申请】汽车方向盘开关can总线通信2015-07-20 4185
-
详解汽车CAN总线2019-07-26 14650
-
如何实现安全可靠的蓝牙通信?2021-05-07 2476
-
怎么实现基于CAN总线的电动汽车电源管理通信的设计?2021-05-12 3013
-
一文浅析汽车CAN-FD总线的通信应用2023-02-14 1456
-
can总线的可靠通信是依靠什么机制来实现的?2023-05-09 2350
-
FPGA实现安全可靠的蓝牙通信2010-03-09 2693
-
基于CAN总线技术实现热网监控控制和通信系统的设计2020-06-05 2970
-
应用最新的 CAN 总线增强功能实现安全可靠的高速汽车通信2022-11-25 396
-
CAN总线的可靠通信是依靠什么机制来实现的?2024-01-30 3591
-
如何使用Arduino实现CAN总线通信2024-11-12 4465
-
如何使用Arduino实现CAN总线通信呢2024-12-23 3604
全部0条评论

快来发表一下你的评论吧 !
