

机器人路径规划之A*算法(附C++源码)
机器人
描述
1. 基本原理
A*算法的本质是广度优先的图搜索。意在寻找一个从起点到目标节点的最短路径。
A*算法在Dijkstra的基础上加入了启发式变量,一般用启发式距离(两点的直线距离)表示。
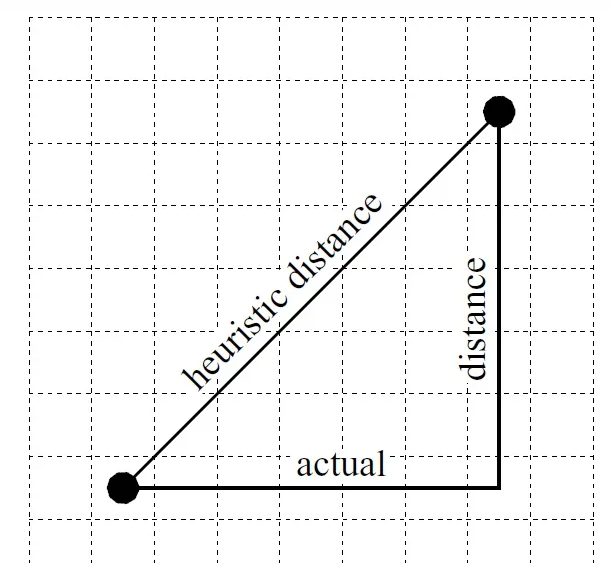
启发式距离
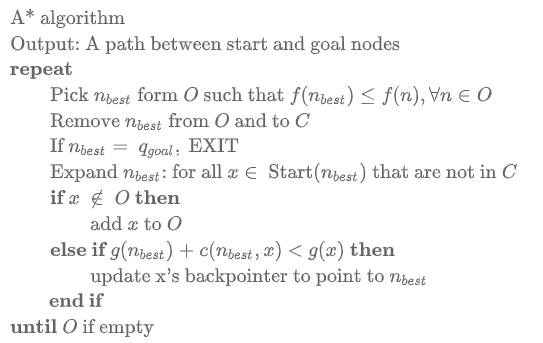
2. 算法伪代码
本伪代码摘取自Principles of Robot Motion
其中O代表优先队列,C存放着已访问过的节点。
3. 关键C++代码剖析
先来看看A*算法运行的最终结果吧
首先先创建一个类代表节点(省略了构造函数等Method)。
class node {
private:
int x, y; // 坐标
double sumCost; // f(n)
double heuristic;// 启发值
bool obstacle; // 是否是障碍物
node* backpoint; // 前驱节点
bool isVisited; // 判断是否访问过
};
在main函数中定义起始节点和目标节点
node startNode(40, 10);// 起始点
node goalNode(10, 40); // 目标点
初始化地图,这里计算了每个节点的启发式距离
for (int i = 0; i 《 mapSize; ++i) {
vector《node*》 tmp;
for (int j = 0; j 《 mapSize; ++j) {
node* tmpNode = new node(i, j);
tmpNode-》setHeuristic(calHeristic(tmpNode, goalNode));
tmp.push_back(tmpNode);
}
roadmap.push_back(tmp);
}
添加障碍物
void defineObstacle(vector《vector《node*》》& roadmap) {
// 先框住四周
for (int i = 0; i 《 mapSize; ++i) {
roadmap[0][i]-》setObstacle();
roadmap[i][0]-》setObstacle();
roadmap[i][mapSize - 1]-》setObstacle();
roadmap[mapSize - 1][i]-》setObstacle();
}
// 再定义一个条形快
for (int i = 1; i 《 mapSize / 2; ++i) {
roadmap[mapSize * 2 / 3][i]-》setObstacle();
roadmap[mapSize * 2 / 3 - 1][i]-》setObstacle();
roadmap[mapSize * 1 / 3][mapSize - i]-》setObstacle();
roadmap[mapSize * 1 / 3 - 1][mapSize - i]-》setObstacle();
}
}
A*算法函数
void aStar(const node& startNode, const node& goalNode, vector《vector《node*》》& roadmap, Mat& background) {
// 使用Lambda表达式定义一个优先队列
auto cmp = [](node* left, node* right) { return left-》gN() 》 right-》gN(); };
priority_queue《node*, vector《node*》, decltype(cmp)》 O(cmp);
node* tmp = roadmap[startNode.coordinateX()][startNode.coordinateY()];
O.push(tmp);
// Algorithm 24 A* Algorithm
while (!O.empty()) {
// Pick nbest from O such that f(nbest) 《= f(n)。
node* nBest = O.top();
// Remove nbest from O and add to C(isVisited)。
O.pop();
nBest-》setIsVisited();
// if nbest == qgoal, EXIT.
if (*nBest == goalNode)
break;
// 八个方向都可以走
std::vector《node》 motion = { node(1, 0, 1),
node(0, 1, 1),
node(-1, 0, 1),
node(0, -1, 1),
node(-1, -1, std::sqrt(2)),
node(-1, 1, std::sqrt(2)),
node(1, -1, std::sqrt(2)),
node(1, 1, std::sqrt(2)) };
for (int i = 0; i 《 8; i++) {
node tmpNode = motion[i];
tmpNode += *nBest;
node* tmpNodePointer = roadmap[tmpNode.coordinateX()][tmpNode.coordinateY()];
*tmpNodePointer = tmpNode;
if (verifyNode(*tmpNodePointer) && !tmpNodePointer-》returnIsVisited() && !tmpNodePointer-》isObstacle()) {
O.push(tmpNodePointer);
tmpNodePointer-》setIsVisited();
tmpNodePointer-》setBackpoint(nBest);
tmpNodePointer-》drawNode(background, imgGridSize, Scalar(0, 255, 0), 0);
imshow(“aStar”, background);
waitKey(5);
}
}
}
// 画出最终的路径
tmp = roadmap[goalNode.coordinateX()][goalNode.coordinateY()];
while (!(*tmp == startNode)) {
tmp-》drawNode(background, imgGridSize, Scalar(255, 0, 0));
tmp = tmp-》returnBackpoint();
imshow(“aStar”, background);
waitKey(5);
}
}
4. 资源指路
A*算法其中大部分变量和算法过程我都尽量和Principles of Motion中的说明保持一致,源代码已上传github(非工程文件,需自行配置)
编辑:黄飞
-
机器人基于搜索和基于采样的路径规划算法2023-10-13 1065
-
基于元胞遗传算法的机器人路径规划技术2021-06-29 1066
-
机器人路径规划算法,全局路径规划与局部路径规划究竟有哪些区别2020-12-26 6586
-
机器人路径规划技术解读2019-09-06 3579
-
SLAM不等于机器人自主定位导航2018-08-24 7200
-
深度解析|机器人自主移动的秘密(三)2017-08-01 4846
-
改进蚁群算法的机器人焊接路径规划_王春华2017-03-19 983
-
基于遗传算法的分拣机器人最优路径规划_文生平2017-01-28 1076
-
labview仿真问题,机器人路径规划2015-04-22 9678
-
机器人路径规划2013-09-03 4720
-
基于遗传算法的AS-R移动机器人路径规划研究2011-04-06 1031
-
遗传算法在水下机器人路径规划中的应用2010-03-03 731
-
基于蚁群算法的机器人路径规划2009-12-18 1026
-
基于NN改进PSO算法的机器人路径规划2009-07-11 818
全部0条评论

快来发表一下你的评论吧 !
