

一种用于无人机集群对地目标的状态估计算法
军用/航空电子
391人已加入
描述
摘 要:随着跟踪技术的不断进步,其应用逐渐普遍化,无人机集群对地目标跟踪技术也得到了广泛研究,其在抗灾救援、目标搜寻等领域发挥着重要的作用。文中给出了一种无人机集群对地目标跟踪技术研究方法,通过无人机载敏感器信息,能够实时稳定的对目标进行跟踪,在目标丢失时,滤波算法能够根据需要给出目标的预测状态信息,仿真结果表明无人机集群在对地目标跟踪的有效性。 关键词:无人机集群;目标跟踪;位置估计;滤波算法
来源:本篇节选自论文《关于无人机集群对地目标跟踪技术的研究》,发表于《中国电子科学研究院学报》第17卷第5期。
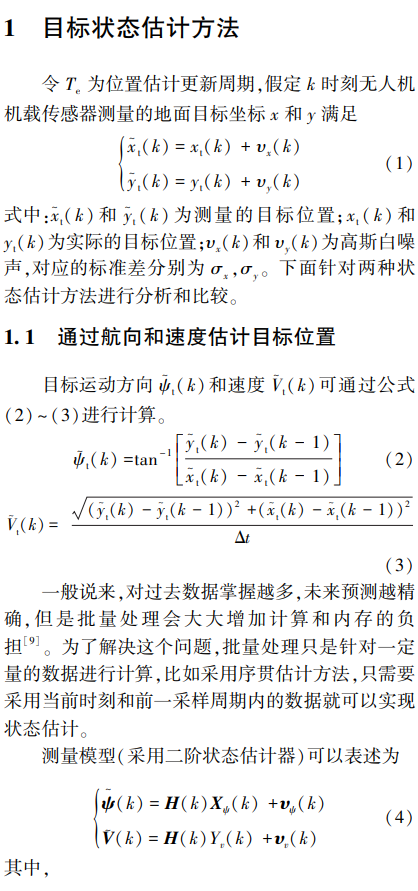
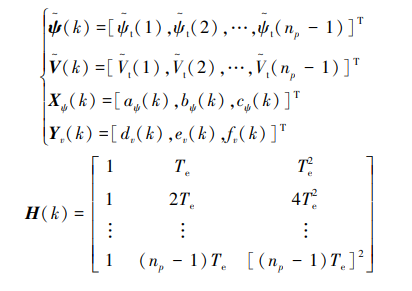
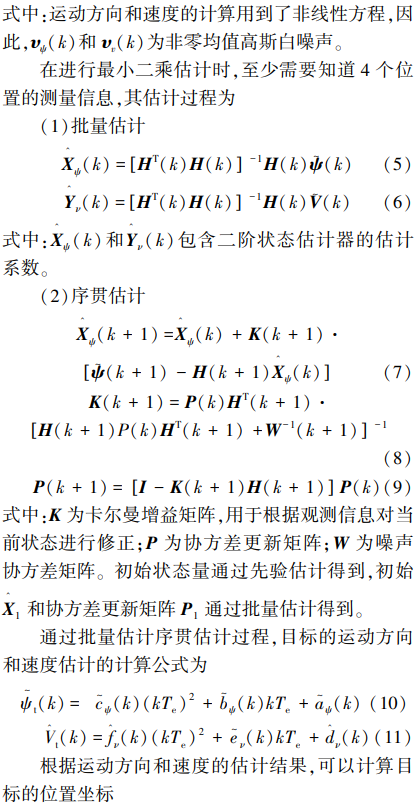
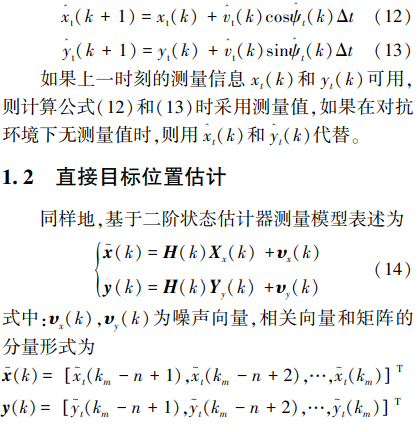
随着无人机集群技术的快速发展,对地面动目标的跟踪和识别成为无人机集群应用的热点问题。无人机集群在执行地面目标跟踪时,通过其携带的可见光相机和雷达等传感器,能够获取目标的位置和速度等状态信息,但是测量噪声的存在导致直接使用这些位置信息时无法获取相对精确的状态信息,无法实现精确跟踪和导引打击。此外,当目标受到短时障碍物遮挡导致无法获取目标状态信息时,需要基于先验信息实现对目标状态的预测和估计。 在复杂环境下,无人机集群协同跟踪地面目标过程中,存在算法复杂、需要训练或先验知识等问题,在应用时需要较高的硬件条件和配套训练设备,无法在无人机集群中广泛应用。基于上述考虑,本文研究一种用于无人机集群对地目标的状态估计算法,将噪声项从测量项中掉,并且当目标的状态信息丢失时,滤波算法能够根据需要给出目标的预测状态信息。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 无人机
-
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程2024-03-12 4903
-
知语云:低慢小无人机如何反制管制监测行为?方式方法又是什么?2023-11-20 4066
-
一文讲解无人机集群与反无人机集群技术2023-02-07 4903
-
各类反无人机技术的优势2022-08-25 28007
-
无人机集群通信组网系统—无人机自组网2022-03-02 4387
-
分享一种无人机开发的基础技能体系2021-11-22 1448
-
基于无人机的遮挡目标跟踪算法2021-06-28 1131
-
基于智能决策理论的无人机集群认知干扰算法2021-03-16 1141
-
无人机探测技术2020-07-29 2958
-
【设计技巧】无人机系列之飞控算法2019-07-14 4817
-
无人机系列之飞控系统2018-09-25 6607
-
武汉无人机无人机比武演练,普宙O2当裁判2018-08-28 3050
-
集群无人机的影响及应用发展2018-07-23 2712
全部0条评论

快来发表一下你的评论吧 !
