

探究驱动电机用霍尔传感器的设计方法 3
电子说
描述
5 霍尔传感器的测试方法
本文仅介绍霍尔传感器的精度测试方法。所谓霍尔精度,即霍尔传感器跳变沿与反电势对应点的相位差,相位差越接近0代表霍尔精度越高。
测试准备
在前期准备时,按照电机反电势测量的标准准备实验设备即可,以下默认电机能够正常匀速旋转,实验室有示波器一台。电机三相记作ABC,霍尔三相记作UVW,电机及霍尔各相一一对应,即A-U、B-V、C-W。
测试项次
1 三相霍尔信号
2 各相霍尔信号精度
三相霍尔信号
使用三个示波器探头分别测量霍尔三相输出线,记录下霍尔波形,测量以下参数:
表5.1 记录参数表
| 记录参数 | 参数作用 |
|---|---|
| 一个机械周期所对应的霍尔信号波形 | 观察霍尔信号编码顺序是否与设计值相同观察各相各电周期中占空比是否为50% |
| U相上升沿与V相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
| V相上升沿与W相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
| W相上升沿与U相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
标准波形如下图所示:
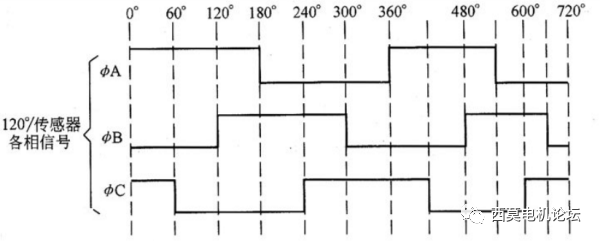
图5.1 典型120°霍尔测试波形
时间差换算电角度公式如下:

各相霍尔精度测试
在进行该项测试时,示波器最好选用隔离示波器,若不使用隔离示波器则可能会有高压反电势与低压霍尔信号之间产生干扰的风险,影响测量精度。
示波器通道1接引出线AB,测量线反电势,通道2接U相,测量线反电势的过零点与U相上升沿、线反电势的过零点与U相下降沿的时间差,换算成电角度后观察是否满足前期设计要求。其余两相可按照相同方法进行测量,单位可以是时间也可以是电角度,测量完成后记录成如下表格:
表5.2 测试结果记录表
| 接线 | 测量点 | 周期1 | 周期2 | 周期3 | 周期4 | 周期n |
|---|---|---|---|---|---|---|
| AB-U | 上升沿 | |||||
| 下降沿 | ||||||
| BC-V | 上升沿 | |||||
| 下降沿 | ||||||
| CA-W | 上升沿 | |||||
| 下降沿 | ||||||
若实验条件足够,可进行多通道同时测量,则可以在电机ABC各相上连接一颗电阻,电阻应大于10K,将三颗电阻另一端连接在一块,形成一个“Y”形回路,此时测量的三相反电势即为相反电势。霍尔跳变沿应与两相之间的交点相对应,测试记录表格与上表相同,标准测试波形如下图所示:

图5.2 典型6通道测试波形
6 霍尔测试时常见的波形问题
以8极48槽电机为例,当电机处于9000rpm时,反电势频率为600Hz,霍尔频率为600Hz,为方便讲解,使用单相反电势与霍尔波形测试结果作为示例,其中红色信号为霍尔波形,蓝色信号为反电势波形,根据4.4所述的问题,分别列出其典型波形图如下:
1 正常波形如下图所示:

2 霍尔信号不变,不能随磁场变化做出跳变。

3 霍尔信号跳变沿与反电势过零点的电角度差过大。

由图可看出霍尔电信号均超前与反电势波形,测量点1为霍尔跳变点,测量点2为反电势过零点,测量点1、2之间时间差为96us。通过5.1中所示公式计算可得,当前电角度差为(96/1666)*360=20.7°。
4 霍尔信号占空比不准确,不是精确的50%占空比。

5 两相霍尔信号之间的电角度差值与设计值不符。

由图可看出,红色相与蓝色相有120°的电角度差,绿色相与蓝色相电角度差不为120°,所以绿色相存在电角度分布不正确的问题。
7 总结
随着电动车的愈发普及,电车市场不断增长,势必会带动下沉市场产品油转电升级,在可预见的将来,该市场产品对霍尔方案的尝试会逐步增多。通过本文所述的设计方法,能够从元器件选型、霍尔检测位置、定位方式选择等几个方面完成一种稳定的霍尔传感器设计。
-
电机驱动中霍尔转子位置传感器介绍2025-02-12 5316
-
霍尔传感器的工作原理和特性 霍尔传感器电路图分享2024-01-03 33866
-
电机霍尔传感器作用2023-12-07 5568
-
探究驱动电机用霍尔传感器的设计方法 12023-01-31 3533
-
探究霍尔传感器和电流纹波技术在电动车窗防夹中的应用2022-01-13 4463
-
有霍尔传感器与无霍尔传感器详解2021-09-06 3240
-
什么是霍尔传感器?2020-08-27 2470
-
霍尔传感器定义2020-06-16 2620
-
请问谁用过霍尔传感器测电机转速吗?2019-09-10 3080
-
霍尔传感器芯片选择和使用的影响2018-09-05 6991
-
霍尔传感器如何测转速_霍尔传感器测转速原理2018-01-13 194513
-
霍尔传感器应用于无刷电机驱动控制2009-11-14 2274
全部0条评论

快来发表一下你的评论吧 !
