

智驾系统的研发给传统新能源汽车带来了哪些福音
描述
随着越来越多的新能源车也开始搭载智能驾驶系统,对于智能驾驶系统所承载的更多功能,新能源车需要提出一些自己的需求,以确保在维持正常的智能驾驶功能。对于节能来说,纯电动车比混动车更加执着。比如常规的节能模式包含Eco模式,先进一点的节能模式为滑行能量回收和制动能量回收这两种。但是在这两个功能的激活期间对智驾系统会有一些功能互斥关系,也有一些单独的需求需要梳理。
实际上滑行能量回收与制动能量回收是两种不同的能量回收形式。比如当某个或某几个车轮打滑时,ESP一定要调动液压去推活塞来进行制动,可利用刹车片进行制动则是车辆动能转换为热能的过程。滑行能量回收要求将车辆动能转换为电能并实现存储的过程,而制动能量回收则是在制动行程的头段设置一部分空行程,当我们踩制动踏板在空行程范围内时液压并不会推动制动活塞,随着制动踏板行程的延伸,活塞制动加入进来,此时就是电制动、活塞制动的叠加状态。对驾驶者造成的感觉就是加速度大幅度增加,会形成非常突兀的感觉。
相比较之下滑行能量回收SRBS(依靠滑行倒拖阻尼获得减速度)要比制动能量回收CRBS更容易去实现,能量回收的上限也更高,甚至是可以达到1G减速度的能量回收。但如此大的减速度,制动能量回收目前则承受不住,CRBS目前能达到0.3-0.5G减速度能量回收。
滑行能量回收系统在设计、标定方面更为简单。制动能量回收系统与ESP、ABS等电子系统会存在很大的冲突。(当然后续像iBooster这种真空助力器的设计改变了这一现状)。
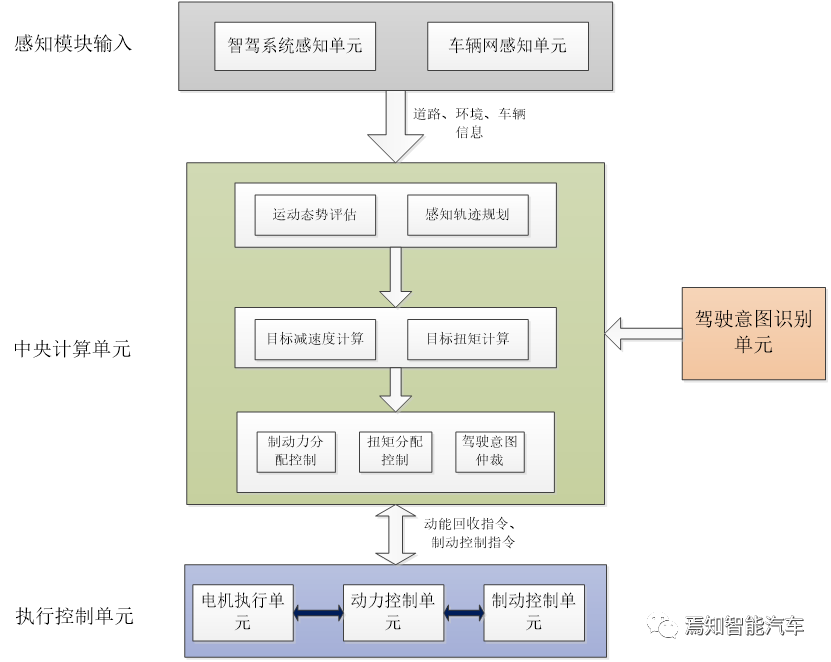
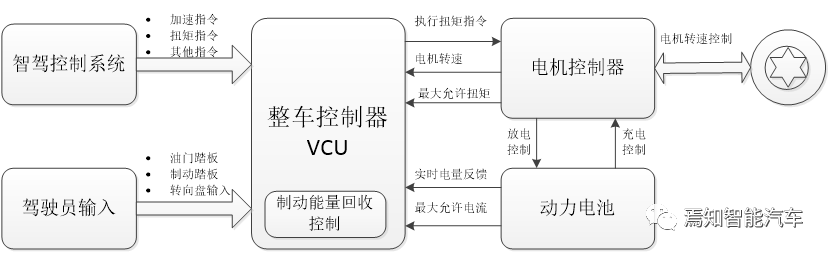
实际上我们最终的目的是面向服务的车辆控制,包括进行子服务拆解(如根据设置的导航目的地拆解子功能包括HWP、NOP、SafeStop、AEB等)、子服务最优实现模式(智驾功能结合整车功能确认哪些相互之间会有影响,其目的是获得更优的回收能量控制)。那么对于搭载先进的智能驾驶系统的新能源车而言,又可以增进哪些更为优质的驾驶体验服务呢?本文将对其进行针对性策略梳理。 滑行能量回收 对于新能源车而言,如果采用双电机模式,最高可提供290kW的回收功率,大部分时候减速度可由电机完成。对于滑行能量回收而言,通常先进的新能源车会设计三种能量回收等级。包括:强、弱、自适应。三种模式的切换主要通过方向盘后方的拨片来实现,驾驶员可通过拨片位置选择进入某一种回收模式从而产生不同的动能回收力度。其中强回收模式表示只要松开油门就会有很强的动能回收;弱回收模式表示松油门后进入滑行模式;自适应回收模式表示自车会根据路况和车距自动进行减速,能够实现单踏板驾驶,毫不夸张的说,自动模式下最高能实现5m/s2的减速度,能够完成单踏板驾驶。
单纯的强/弱回收模式控制逻辑相对比较机械和单一,其动能回收的强度是在开发中提前标定好的数值,这是一种传统的动能回收实现方式。即启动车辆通过确认与前车的距离和相对速度(或前车的加速度信息)后,自动调整回收力度。通常情况下,两车距离越近,相对速度越大(这里指本车大于前车的速度差),则能量回收的力度越大,最终确保能够将车辆控制到停止。
自适应能量回收策略会根据工况的变化自动调节滑行阶段的回馈力矩,提高能量回收效率及舒适性。
主要可以针对如下几种不同变化参数进行能量回收:
1)基于整车质量的能量回收
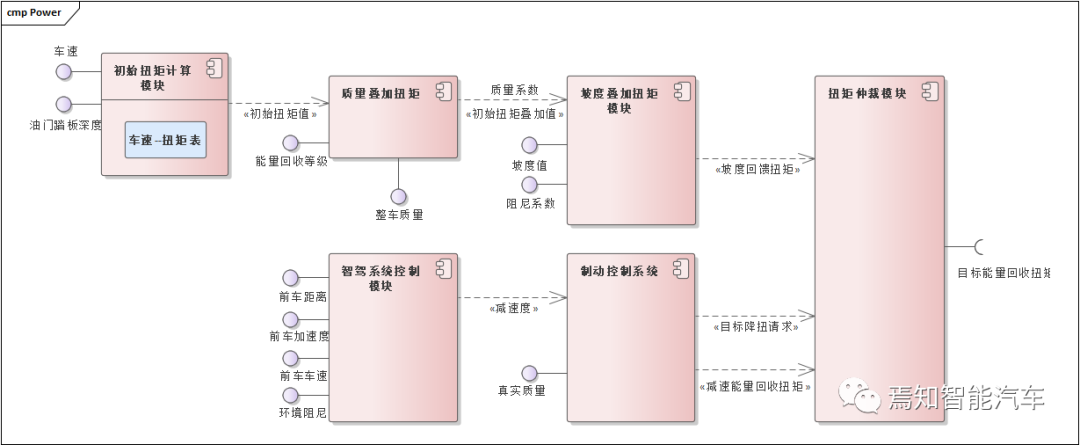
顾名思义,就是基于整车质量,利用动力学方程里面的M参数对其控制扭矩进行调节,保证在不同整车质量的情况下,控制滑行回馈的减速度一致。这里需要注意,整车质量除了自身负载外,还有一部分源自于环境对整车质量可能造成的影响。比如各类附加乘客或货物的载重。车辆自身的质量发生较大变化时,自适应能量回收功能根据当前估算质量与空载质量的比值调整回馈扭矩。
整车质量的初始值是可以提前植入VCU算法模块的,如果车身质量发生了变化,则需要结合CAN 线中的前轴总扭矩、车速、油门深度、制动深度、ESP估算的地面附着力等参数信号,由整车动力学平衡方程通过滤波算法处理得到质量计算值。
2)基于道路路面的能量回收
路面情况影响的能量回收主要体现在路面是否有坡度和坑洼及附着力大小(是否打滑)等。比如,滑行能量回收中需要根据路面坡度,实时调节滑行回馈扭矩,使得整个控制过程更加符合驾驶员的预期感受。
当坡度小于其限定的阈值时,具体说来,过程控制如下:
当上坡工况下,坡度(该值通常可以由ESP内置的IMU检测发出,也可由TCU检测发出)大于0同时小于一定阈值(该阈值可以提前标定)时,VCU通过坡度值计算对应的回馈扭矩衰减系数,该衰减系数影响整个回馈扭矩的控制比重。在一定坡度范围内,随着坡度的增加该衰减系数可以减小回馈扭矩,降低由于坡度阻力产生的减速感。
当下坡工况下,首先需要将自车质量分解为沿着坡道的分量,VCU通过计算该分量得到叠加扭矩,该扭矩和回馈扭矩方向一致,可以增加回馈扭矩,从而产生一定的滑行减速度,避免车速增长过快。
3)基于自动跟车的能量回收
识别到本车前方有车,本车滑行能量回收功能激活,根据识别的本车与前车距离及相对速度自动调节回馈力矩,体现到整车上主要体现为可以自动调节车速,提高滑行能量回收效率及驾驶经济性。通过滑行能量回收产生的减速度对于驾驶员来说体验感会更加友好。
整个自适应滑行能量回收过程通过检测本车车速、本车与前车距离、前车车速、前车减速度等信息。跟车滑行能量回收控制时,检测到与前方车辆的距离小于一定阈值时且与前方车辆的相对速度逐渐增大时,VCU会根据与前车的相对速度及相对距离计算化性能量回收过程中需要实现的目标减速度。结合目标减速度与目标回馈扭矩的关系,计算出对应适当的回馈扭矩值做为能量回收的目标扭矩值。
首先,判断自车是否进入跟车逻辑。当VCU接收到智驾发送的本车道前方目标为有效值时(即ADC_FollowObj==Valid)&& 坡度信号状态为有效(Slope_Status==Valid)&& 自车车速>=标定车速(比如怠速)。当然,也可参照智驾领域的跟车逻辑判定方式判断整车是否进入前方跟车状态。
其次,需要根据如下公式计算在某一时刻的本车跟随前车的目标跟车距离。

其中△V表示两车的相对速度,tfollow表示跟车时距,dmin表示跟车需要的最小距离。
然后,由于对于能量回收而言实际是通过控制车辆的反拖力矩变化来控制减速度和减速率。因此,下一步需要重点计算减速度和减速率。
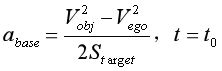
如上公式中abase表示在某一瞬时状态下的基础减速度值,Vobj表示跟车目标速度值,Vego表示自车速度值。整个减速度规划是持续性的划分的积分时间可以足够小的一定范围内。当然整个调整过程需要通过PID进行反馈回环控制。

如三个公式,做如下说明,首先我们根据识别到的当前目标距离与实际距离在固定时刻点t0计算一个基础加速度值abase。然后根据在一定时间t内识别到的实际距离和目标距离差值参照PID控制逻辑构建对应的控制结构,生成跟车的最终目标加速度值aobj。
最后,也是对于滑行能量回收最重要的一步,就是根据计算生成的加速度值转化为跟车滑行回馈扭矩,表示如下:

如上公式中,mego表示质量计算值,aroll表示滚动阻力加速度,aslope表示坡道阻力加速度,Fstr表示转向阻力补偿,R表示滚轮半径,该值是在进行方向盘转向标定的时候提前标定好的。可以通过查表得到具体的对应值。
从如上分析看来,整个滑行能量回收的整个控制过程可参照如上三种检测和计算方式的控制值进行“自适应”能量回收控制。
4)车联网相关能量回收
另一种常用的能量回收的场景是基于道路设施、标牌等相关单元的,这里举几个简单的例子进行说明。比如通过红绿灯前需要适当减速以在灯前停止;又如即将通过某一限速牌前需要适当减速;还有即将进入匝道前等等这一系列场景都需要提前减速。
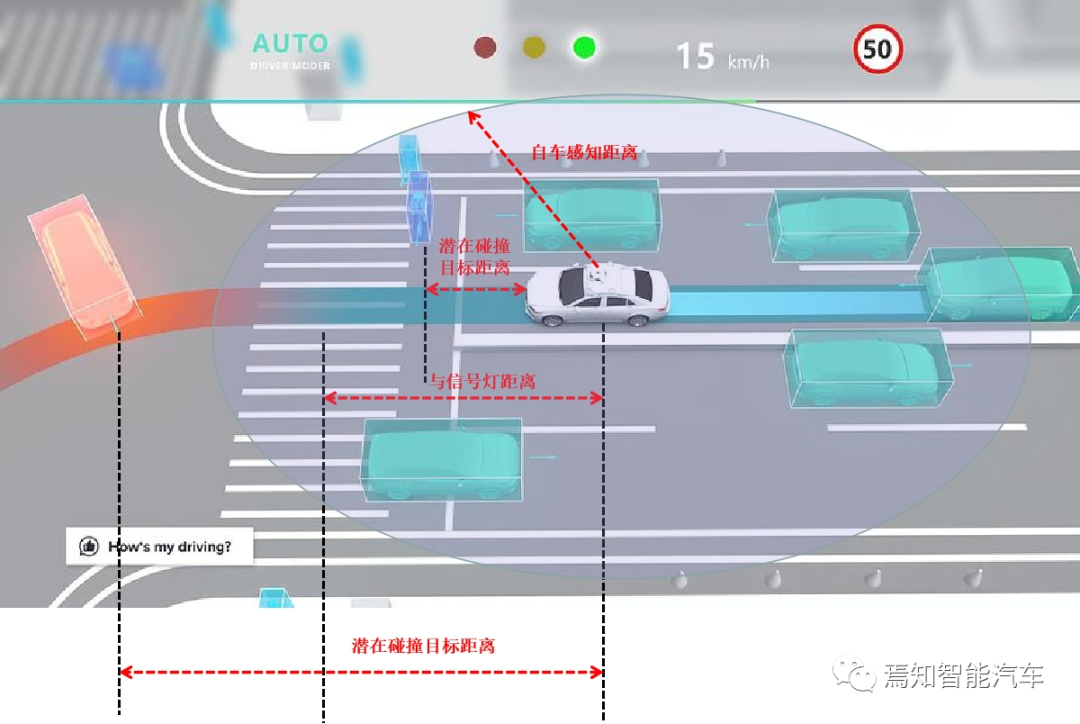
因此,如果可以通过高阶智驾系统识别到前方道路的红绿灯信息(包含红绿灯状态、红绿灯倒计时信息、红绿灯距离当前车辆的距离);通过红绿灯倒计时和红绿灯距离信息,两者结合参照如上类似跟车滑行减速的方式计算合适的滑行回收力矩,用于控制车辆。即将红绿灯看成前方静止车辆目标,其相应的Vobj应该等于0。
其次,识别到前方道路的限速牌信息(包含限速值信息、限速标牌距离当前道路的距离信息)。前方标牌目标信息可以看成是前车为静止目标的类似模式来进行回收扭矩计算。标牌信息显示的限速值可看成Vobj=对应的限速值。
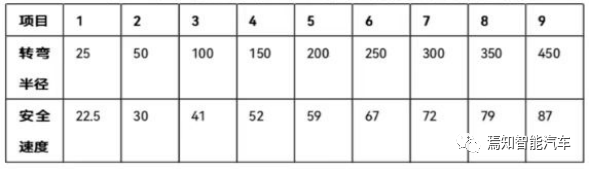
如果是考虑类似高速点对点驾驶的NOA场景,在车辆下匝道,即将过弯道这类场景时,其目标车速Vobj具有一定的不确定性,可以综合考虑参照经验值标定。通常情况下匝道限速为30-40kph,弯道可提前根据弯道半径进行过弯速度标定。
各弯道半径下对应的最大驾驶速度表:
制动能量回收 这里需要说明的是除开滑行能量回收外,在新能源能量回收这块还有一种制动能量回收机制。这种机制和滑行能量回收最大的区别就在于,前者是靠松油门后VCU反拖获得制动减速度。制动能量回收则是通过驾驶员踩制动踏板来产生一定的制动减速度从而获得制动力。该制动力的分配由IPB参照当前车速、驾驶员踩制动踏板深度来进行估算一个请求加速度。通常是IPB首先会给VCU发送一定的降扭请求,VCU解析该请求通常是转化为对应的滑行回馈扭矩,此过程会长生一定的反拖减速度值。IPB对该减速度值影响的车速值进行实时监控,如果速度值在某一限定的时间内小于某个阈值,则认为需要切入制动器进行强力制动。
如上整个控制过程都是由IPB自发主动完成的。有个问题大家可能会问,如果应用于智驾系统而言,该方式是否还可以完全适用。通常智驾系统在对滑行能量回收和制动能量回收进行控制时,有比较明显的区别。体现如下:
1)对于安全性功能如AEB、FCTB、ELKA、MEB等功能,通常对于制动响应时间比较关注,在制定需求时,通常会考虑激活如上主动安全功能时,将两种能量回收控制模式都抑制掉;
2)对于辅助驾驶功能呢如NOA、HWA、、ALC、LCC、ACC等功能,通常对于车声控制的舒适性、平顺性等有特殊要求。在制定需求时,通常会考虑激活如上辅助驾驶功能时,并不会考虑将上述两种能量回收抑制,执行器可根据自己的响应能力进行自适应调节,只要确保在规定的时间内响应到上层的减速请求即可。实际上对于这种通过能量回收方式响应的减速度信息在执行到稳态前的状态冲击会更小、震荡时间也会更短。 基于地形的动能模式自由切换 在一些常规驾驶车辆中,会有道路模式控制方案。比如针对草地/砂砾地/雪地、泥泞地面/车辙地、沙地等不同的路面情况,通过驾驶员手动选择不同的驾驶模式可以使得整车在这些路面上得到更好的控制。该控制过程是通过VCU提前标定不同的动力扭矩控制参数,制定不同的能量回收策略,同时有部分情况还会考虑与ESP的相关功能进行联合标定。
那么问题来了,为了提升驾驶体验感,动力专业希望能够有一种针对路面情况提前自适应调节动能模式切换。即,不在需要驾驶员提前识别前方道路情况按压对应的模式按钮切换到对应的场景调度中。比如检测到前方为雪地,则提前一定距离自主切换为雪地模式。实际上ADAS系统做到更加智能的程度也是需要自主切换驾驶模式的。这点上与智能汽车的需求是比较契合的。
当然,结合ADAS系统感知能力,该策略是基本可以实现的。对于路面的识别目前我们还是多数依靠视觉方案来实现。传统的识别方式是场景库提前适配,识别过程中通过图像匹配来实现,该方案需要提前跑较长时间的路试进行数据采集,采集的数据需要进行分类、标注,最后形成典型的匹配场景库。在实时检测过程中,通过识别到的道路实际环境图像与其场景库中的图像进行像素级或区块级匹配,便可以生成匹配结果供参考。
对于如上主流图像识别方法还主要停留在大量人工标记图片阶段,即需要专门的图片标记人员从海量的图片中对图片进行选择标记,挑选出能够用于训练图像识别模型的图片。用这些标记出的图片组成训练集,并用于模型训练,在上述描述的方法中,存在一些人工成本高、效率低下、标记误操作几率大、模型迭代优化复杂等不容忽视的缺陷。
先进一点的方法是通过自学习方式来,即边识别边聚类边重建,通过一定的先验信息作为导入,通过建立自学习神经网络可以很轻松的从现实中提取的图片中提取关键信息,识别出是否符合相应的实验结果。
对于第一种方案可能更多的是靠图像match的方式进行。因此,更多的是考虑常规逻辑算力的损耗,对于地形环境识别这类较为复杂的场景显得比较吃力。而对于第二种方式则是基于点云或者纹理信息的,这就需要更多的考虑AI算力损耗。并且整个点云聚类和重建过程也是极其庞大的计算量。因此,在考虑算力不高的域控场合,其适用度不大。 总结 除开如上几种针对新能源车所优化的性能项外,实际上还有很多可以利用智驾系统能牵起来优化的传统功能,比如奔驰最近较火的魔毯功能(也有叫主动悬架功能)也是充分利用了智驾系统的感知能力对车辆的提前控制。
目前自动驾驶在业界进展还是比较缓慢,导致很多投资者对于其信心有些受到打击。但是笔者想说的是智驾系统本身的利用价值并不仅仅在于让车辆自主驾驶的更加智能,更在为传统车型提供更多的智慧眼,也就是让整个车辆不再是盲车。这点上对于优化整个车辆控制就显得尤为重要了。
审核编辑 :李倩
-
【换道赛车:新能源汽车的中国道路 | 阅读体验】1.汽车产业大变局2024-03-04 5550
-
新能源汽车车载充电机的相关资料分享2021-12-31 6406
-
回收新能源汽车电池包,回收新能源汽车电池 回收新能源汽车18650电池组 回收新能源汽车软包电池组2021-12-16 3079
-
回收新能源汽车电池包,回收新能源汽车电池 , 回收新能源汽车,18650电池组回收2021-12-02 1727
-
各种电动汽车回收,各种新能源汽车回收,各种新能源汽车回收,各种新能源汽车电池模组回收2021-10-02 2311
-
新能源汽车回收业务|新能源汽车电池包回收|新能源汽车电池模组回收|库存新能源汽车回收|新能源汽车高价回收2021-09-14 9223
-
求一种新能源汽车热泵空调技术方案2021-09-09 2494
-
新能源汽车高压连接器技术、设计及趋势2021-05-27 4525
-
2018杭州国际新能源汽车展2018-09-07 1520
-
谈谈国内新能源充电桩发展前景2018-06-21 9159
-
如何完成对新能源汽车的结构扫描?2017-08-03 3969
-
中国新能源汽车驱动发展2016-01-27 6712
全部0条评论

快来发表一下你的评论吧 !
