

一径科技高性能车规级长距MEMS激光雷达ML-Xs首次亮相海外市场
描述
又到一年CES。毫无疑问,每年的CES已经成为全球消费电子行业的重大节日。2023年CES展上,一径科技又一旗舰产品——高性能车规级长距MEMS激光雷达ML-Xs首次亮相海外市场。

很多朋友来问:一径ML-Xs采用的是什么技术路线?和市场上的其他同类产品相比,ML-Xs有什么核心竞争力?今天这篇,我们就来讲一讲ML-Xs的硬核实力。
ML-Xs, 追求极致的远距离感知能力
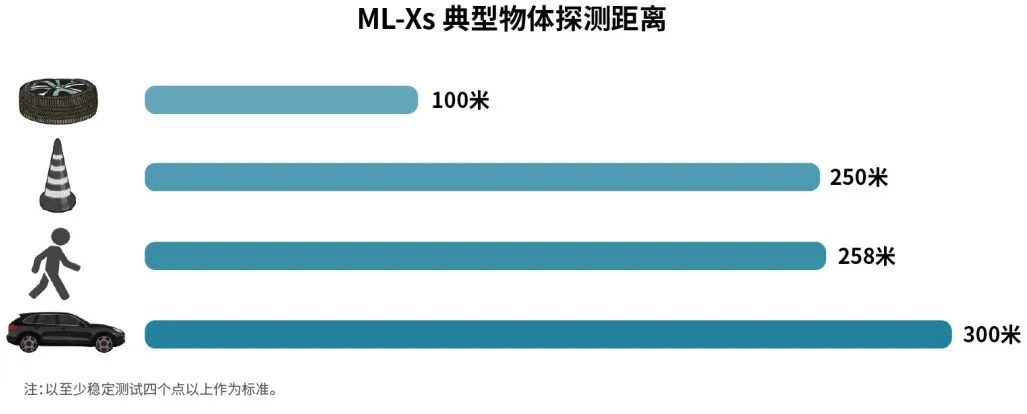
长距离激光雷达在自动驾驶高速场景和城市中速场景的感知中扮演着至关重要的角色。比如,能否提前足够的距离将前方危险障碍物的信息提供给感知系统?能否稳定地由近及远或由远及近地跟踪前方移动目标的信息?一径科技认为,衡量长距激光雷达上述能力的一个关键指标是感知距离。激光雷达的感知距离取决于两个主要的因素:足够长的探测距离和足够小的角分辨率。这两个参数决定了激光雷达是否能在足够远的地方对一个小尺寸目标物有足够数量且稳定的探测点云。一径科技的长距激光雷达ML-Xs即是以“追求极致的远距离感知能力”为核心目标进行的设计。我们先来看看这款产品的核心参数:
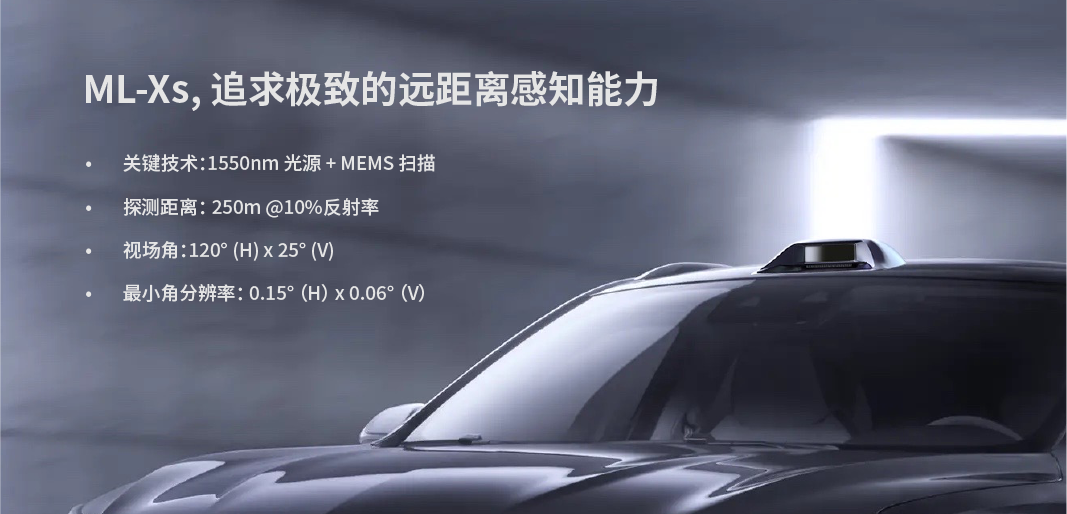
核心技术路线:1550nm 光源 + MEMS扫描
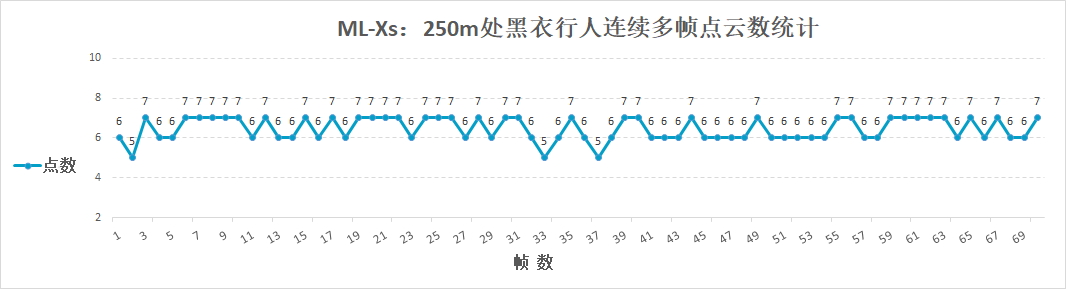
ML-Xs采用了一径科技成熟且先进的MEMS激光雷达平台架构,激光光源则选择了1550nm的光纤激光器。1550nm光纤激光器具有出光峰值功率高、光束质量好和点频数高的特点。在人眼安全的范围内,超高的出光峰值功率可极大地提升激光雷达的探测信噪比,从而实现高达250m@10%的探测距离。由于信噪比的提升,其在远距离的测量更加稳定,保证了远距离下对小物体的稳定点云输出。
扫描方式上,ML-Xs复用了一径短距激光雷达同款的MEMS微镜模组,保证核心部件在新产品应用上的成熟度。也正因为如此,ML-Xs在车规级的振动、冲击等可靠性上也有了丰富的应用验证。最重要的是,得益于MEMS微镜的2D快速扫描特性,ML-Xs能够轻松实现超高的空间分辨率,其纵向等效180扫描线在所有长距激光雷达产品中也属佼佼者。可以说,高速扫描的MEMS微镜和高点频输出的光纤激光器是完美的结合。
水平视场分区设计
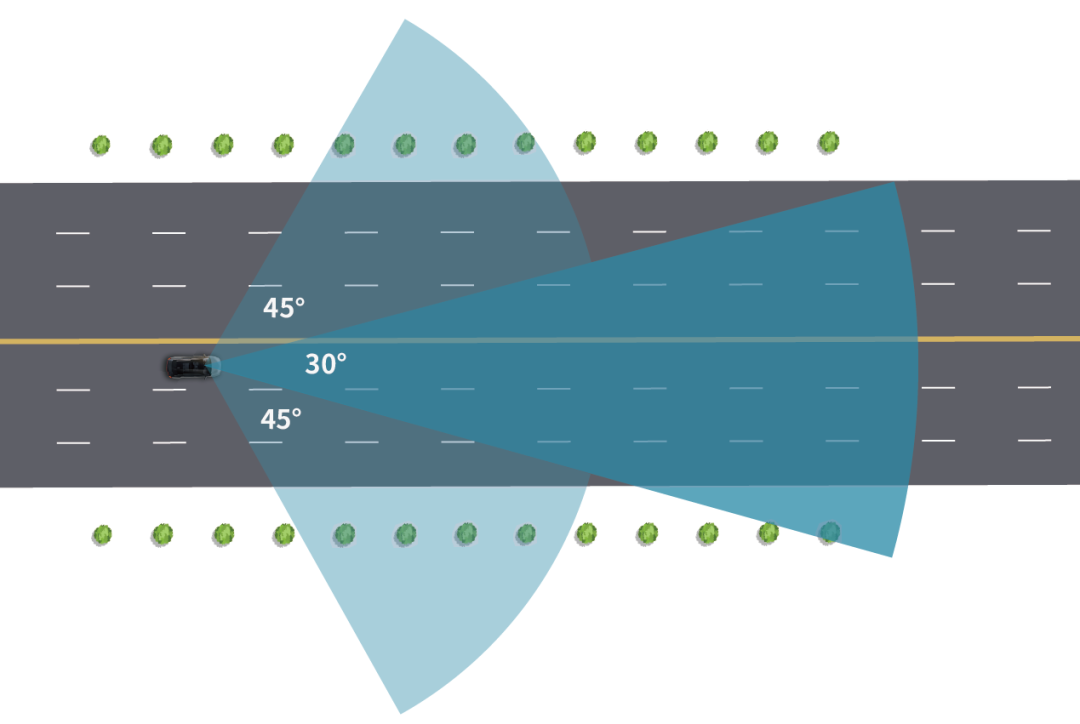
如前所述,长距激光雷达的两个重要应用场景为高速和城市中速场景。而这两个场景对于激光雷达的需求是有区别的:高速场景追求看得远,城市中速场景追求看得广。ML-Xs基于场景实际需求,推出了特有的水平视场分区设计,将120°水平视场角分成正前方超远距离探测区域和两侧中远距离探测区域,完美满足上述两个场景的感知需求:
中央正前方(-15°~+15°)拥有超远的探测距离(250m@10%反射率)和足够小的水平角分辨率(0.15°),以应对高速场景对正前方超远感知距离的需求。
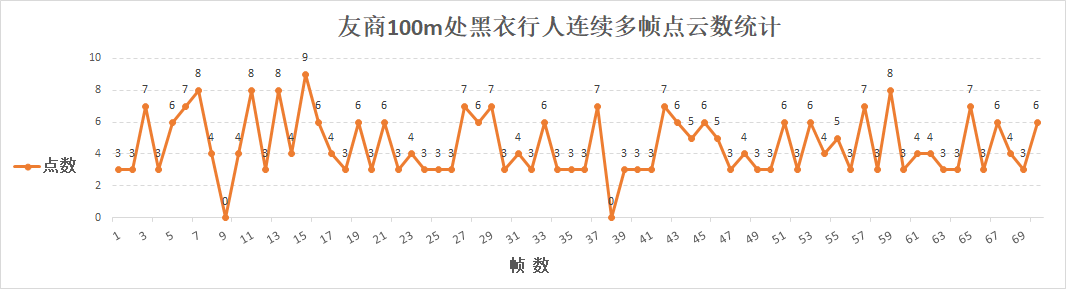
两侧视场(-60°~-15°和15°~60°)探测距离为100m@10%反射率,保证在城市工况下大角度的感知探测。
更重要的是,水平分区的模块设计在未来技术演进上更具灵活性,可以根据不同分区需求的变化而独立演进,既可以将中央区域感知能力进一步提升,也可以进一步加大侧视场的角度覆盖范围。
垂直视场ROI设计,关键扫描线用在关键区域
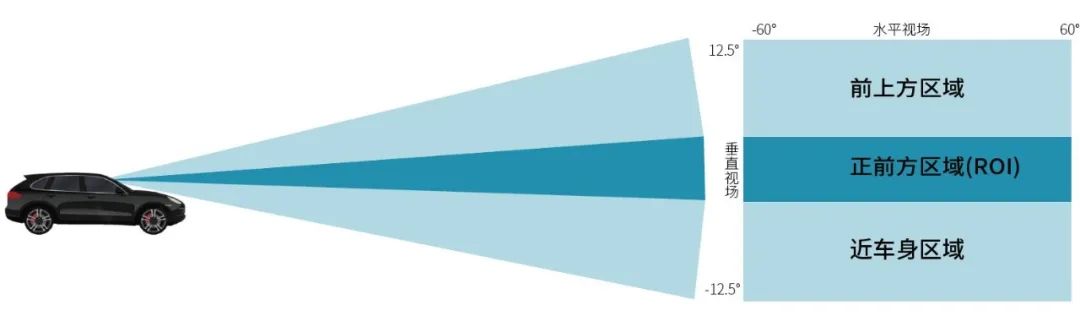
除了上述所讲的水平方向分区设计,垂直方向的扫描线分布也是影响长距激光雷达感知距离的主要因素。ML-Xs将车前方垂直视场角覆盖的区域分为了三部分:近车身区域、正前方和前上方区域,并分别对三个区域进行了垂直线束分布的优化:
近车身区域:指的是激光雷达垂直视场向下的部分,一般来说这部分视场覆盖的是车前方的近距离区域(70米范围内)。此区域对角分辨率要求不高,只要能满足中短距的成像要求即可。
正前方区域(ROI):指的是激光雷达垂直视场水平线附近的角度范围。该范围是覆盖车正前方远处的关键区域。在此区域,ML-Xs的垂直角分辨率为0.06°,为正前方远处关键物体的检测提供了足够的分辨力。
前上方区域:该区域一般是车前上方的空间,ML-Xs同样采取了与近车身区域类似的策略。
通过分区域优化设计,能够更好地满足长距激光雷达在不同场景下的应用需求,将有限的扫描线用在最关键的区域。此外,得益于MEMS微镜灵活的扫描方式,该垂直ROI区域还可以根据不同安装高度进行灵活调整,从而适配不同车型的要求。
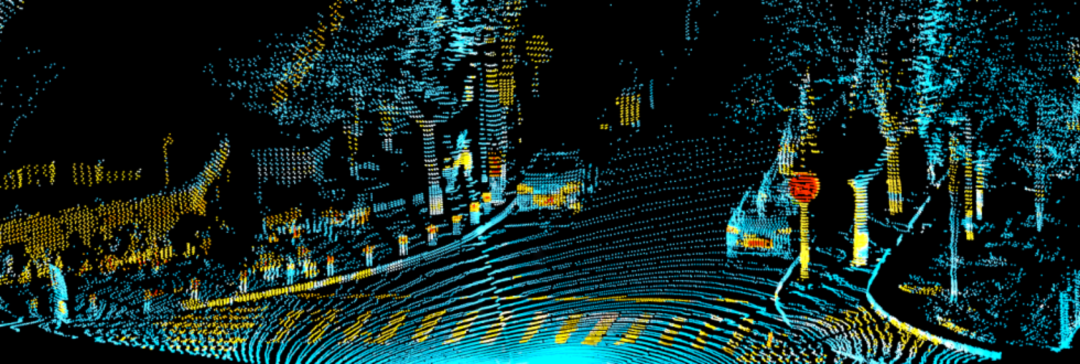
ML-Xs,无与伦比的全视场感知能力
基于上述三点产品设计理念,ML-Xs实现了业界领先的全水平视场感知能力,能够及时有效地发现和跟踪多个不同角度的“感兴趣目标”。
得益于成熟先进的非同轴MEMS激光雷达架构以及1550nm光源的引入,ML-Xs是一径科技面向自动驾驶行业推出的又一力作,相信一定能为自动驾驶客户带来无与伦比的前向感知体验。
审核编辑 :李倩
-
一径科技激光雷达产品助力煤矿行业智能化转型2025-04-10 1211
-
速腾聚创发布首款超长距激光雷达M32024-01-18 1988
-
一径科技发布一款全新SPAD激光雷达—ZVISION EZ62024-01-11 2318
-
一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局2023-09-19 1052
-
什么是“车规级”激光雷达?2023-02-08 7451
-
CES亮点 一径科技ML-Xs首次亮相CES 追求极致的远距离感知能力2023-01-09 3741
-
一径科技与NVIDIA达成合作 共同推动固态激光雷达智能产业化新进程2022-10-25 1246
-
一径科技正式加入NVIDIA Jetson生态系统2022-10-17 2054
-
一径科技宣布完成数亿元B轮融资2021-06-21 3703
-
市场超千亿!前装量产元年已来!这家激光雷达企业获数亿元B轮融资2021-06-19 5227
-
一径科技携最新产品-固态激光雷达ML-Xs亮相上海国际车展2021-05-06 3483
-
华为推出96线中长距车规级高性能激光雷达2021-03-19 4880
-
RoboSense发布最新版车规级MEMS固态激光雷达2021-01-19 4683
-
华为高性能车规级激光雷达首发,首次面向百万级量产需求2020-12-22 3317
全部0条评论

快来发表一下你的评论吧 !
