

西安光机所高精度跟瞄光学系统视轴稳定技术研究取得进展
描述
近日,机械系统与信号处理领域国际顶级学术期刊Mechanical Systems and Signal Processing在线发表了中国科学院空间精密测量技术重点实验室在高精度跟瞄与视轴抖动主动抑制方面最新研究成果。论文第一作者为重点实验室成员吕涛,通讯作者为西安光机所阮萍研究员,合作作者为重点实验室成员姜凯、井锋。该成果为重点实验室承担的“引力波探测”重点专项项目开展提供了重要理论支撑。
科学观测、深空光通信以及引力波探测等任务对跟瞄光学系统的视轴指向精度及其稳定性提出了达到亚urad乃至nrad的高要求。来自系统内外部的动态振动扰动是影响视轴精度的主要因素,因此抑制动态振动扰动成为了领域内最具挑战性的关键问题之一。在一些高精度、高稳定性的应用场合,会采用快速控制反射镜等运动部件作为视轴的精确指向与稳定的关键单元,但其引入的寄生扰动却是制约系统精度与稳定性进一步提升的重要因素。该项研究通过创新性建立的光-机-电多学科交叉耦合的系统级视轴指向与抖动评估预测模型,针对快速控制反射镜在精密光束控制中产生的寄生扰动的问题,通过不确定性分析、时频域比对等手段,定量分离寄生扰动分量,结合预测模型,提出破解寄生扰动的补偿方法及视轴抖动综合整治思路,经外场测试,试验数据充分验证了模型的有效性。
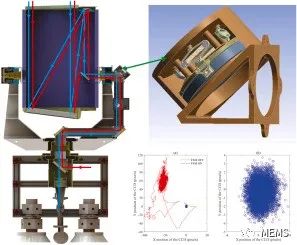
快速控制反射镜引入的寄生扰动分析
快速控制反射镜引入的寄生扰动分析
该项成果为高精度跟瞄光学系统的系统级集成设计、分析与优化提供了高效数值分析模型,也为有效满足国家空间精密测量领域的相关需求提供了新的思路和手段。
论文链接:
https://doi.org/10.1016/j.ymssp.2022.110002
审核编辑 :李倩
-
切换变倍光学系统设计2010-04-26 2270
-
高精度CCD尺寸自动检测系统的光学系统设计.pdf2012-07-20 3111
-
OCAD光学系统自动设计程序2020-03-23 2539
-
光学自动设计及光学系统的分析2017-11-17 1559
-
西安光机所自由曲面光学研究取得进展2021-01-15 3763
-
高斯光学,理想的光学系统2021-06-01 6174
-
光学系统低误差敏感度设计方法的研究现状与进展2022-11-14 3391
-
光学系统设计流程2023-06-13 2249
-
光学系统的基本特性2023-06-14 3120
-
光学系统设计的不可忽略的参数介绍2023-06-19 835
-
折衍射混合成像光学系统设计2023-07-02 2435
-
基于离轴成像光学系统的设计2023-09-10 3784
-
光学系统设计过程2024-01-23 1773
-
中国科学院西安光机所智能光学显微成像研究取得新进展2024-09-29 1297
-
西安光机所在太赫兹超表面逆向设计领域取得新进展2025-04-22 1026
全部0条评论

快来发表一下你的评论吧 !
