

FOC控制的基本理论总结
电子说
1.4w人已加入
描述
一、同步电机是怎么转起来的
永磁同步电机结构如下:
外围是定子绕组,中间为永磁体,设永磁体极对数为np,则转子永磁体共2*np个,其中每相邻的3个定子绕组对应uvw三相,绕组在空间上均匀分布。为了便于分析电机运行原理,对电机结构进行简化,假设电机极对数为1,且电机内部只有三个定子绕组,它们在空间上间隔120度,可以表示如下图:

当uvw三相通电之后,因为电磁感应的原理,空间中将产生磁场,三相定子产生的磁场方向与其坐标轴方向一致,大小与其电流大小成正比。
当向三相定子绕组通入相位差为120度的交流电时,三相绕组产生的磁场叠加为圆形磁场。具体原理以及动画演示见:[永磁同步电机控制笔记:上帝视角看calrk、park变换](http://mp.weixin.qq.com/s?__biz=Mzk0MjM3NDg3NA==&mid=2247484032&idx=1&sn=b5a07e9e87205be7147dc7f501122b9e&chksm=c2c56835f5b2e1236bb7ad1cc7d3f84a8e929f4f6e919aa92267516b9afec6417211512d7405&scene=21#wechat_redirect)
所以同步电机运行的本质是== =静止的定子产生磁场,这个磁场拽着转子旋转= 。
二、什么样的旋转磁场效率最高
既然永磁同步电机工作的本质是定子磁场带着作为转子的永磁体旋转,那么是不是只要产生了旋转磁场就能够让永磁同步电机旋转呢?显然不是,若定子磁场旋转频率过高,转子转了10度,定子磁场就已经旋转了180度,那么结果就是转子来回震荡,如果定子磁场旋转频率更高,定子就会在更小的范围内更快的震荡。
可以想象,只有当旋转磁场旋转频率和转子旋转频率保持同步,才能保证电机旋转平稳,电机静止的时候不能直接通入旋转频率极高的磁场,如果电机静止时给转子极低频率的旋转磁场,让电机慢慢启动,随着电机转子的转动慢慢提高磁场的频率到目标频率,是不是电机就能稳定运行呢?答案是肯定的,恒压频比控制(VF控制)就是这种思路,不过考虑到电机高速旋转时需要消耗更多能量,这种控制方法在提升频率的同时也提升了输入电压。
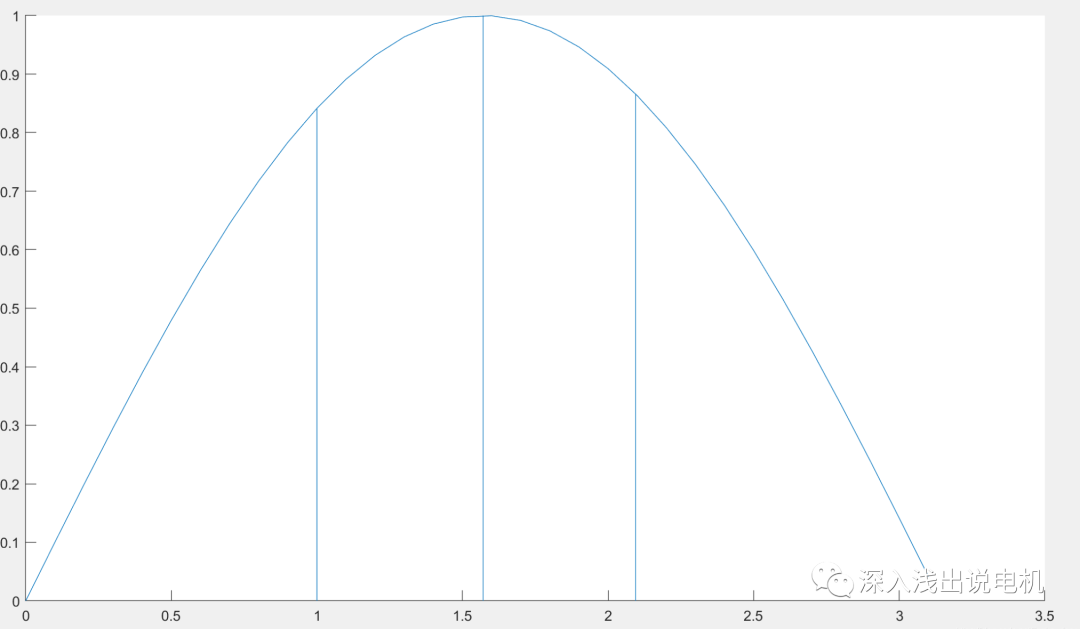
但是很显然,当负载变动的时候这种方法就会出现问题,比如轻载运行,稳态时磁场和转子N极夹角1弧度,随着负载加重,磁场和转子夹角越来越大,直到夹角为pi/2弧度,磁场做功最大,产生最大转矩,即电机效率最高。如果此时继续加大负载,磁场和转子夹角继续变大,而转矩变小,电机将发生失步。上图表述了磁场和转子夹角与磁场利用率的大致关系。
那么有没有办法让磁场利用率始终保持最高呢?
想要让定子磁场利用率最高,就要保证定子磁场产生的力全部用来拉动转子旋转,就是说,合成磁场的方向要超前转子的方向90度,并一直保持超前90度。
三、怎么精准控制旋转磁场的方向
前文提到,想要实现最高效率的利用旋转磁场就是要保证旋转磁场和转子之间的夹角始终保持90度,这就要求必须准确的知道转子的位置,一般来说,电机转子的位置可以通过编码器获取,电机编码器有便宜但是分辨率低的霍尔编码器,有分辨率达数千甚至上万线的增量式编码器,还有分辨率高达2^^17^甚至2^^23^的通信式编码器。通过编码器可以准确的知道转子的位置,对于对成本敏感但对精度要求低的场合,可以使用位置估计的方法获取电机转子的位置。
对磁场的控制本质上是对电流的控制,因为磁场是由电流产生的。
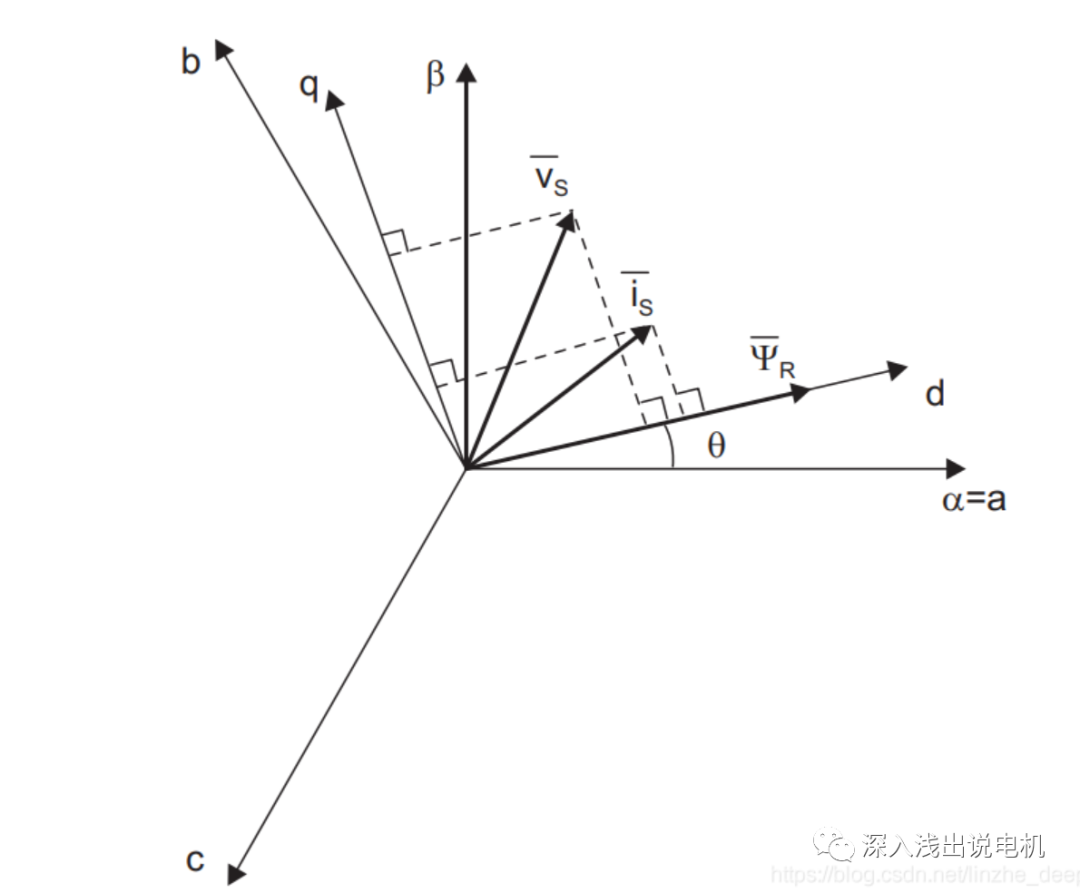
获取到电机转子的位置之后,就可以通过坐标变换的方法将电流从以定子为基准的uvw坐标系转化到和转子方向始终一致的dq坐标系。
在dq坐标系中,电机转矩可以表达为:**T~e~ = 3/2pn(Φ~f~i~q~ + (L~d~ - L ~q~ )i~d~i ~q~ )**
所以通过坐标变换将三相电流转化成了控制电机转矩的q轴电流,与控制励磁磁场的d轴电流,图中θ为电机定子u相与转子的电角度。坐标变换的具体原理以及图示参见永磁同步电机控制笔记:上帝视角看calrk、park变换
既然说如果让定子磁场,也就是输入电流,全部用来拉着电机转子转就能够实现效率最大化,那么实现坐标变换后,让电流全部在q轴方向就好了,让d轴电流保持为0,对于L ~d~ =L~q~的隐极电机,i ~d~ =0的控制即为最小电流转矩比控制。
四、怎样调节dq轴电流
那么怎么让电流全部在q轴方向呢?我们没有办法直接控制电流啊。
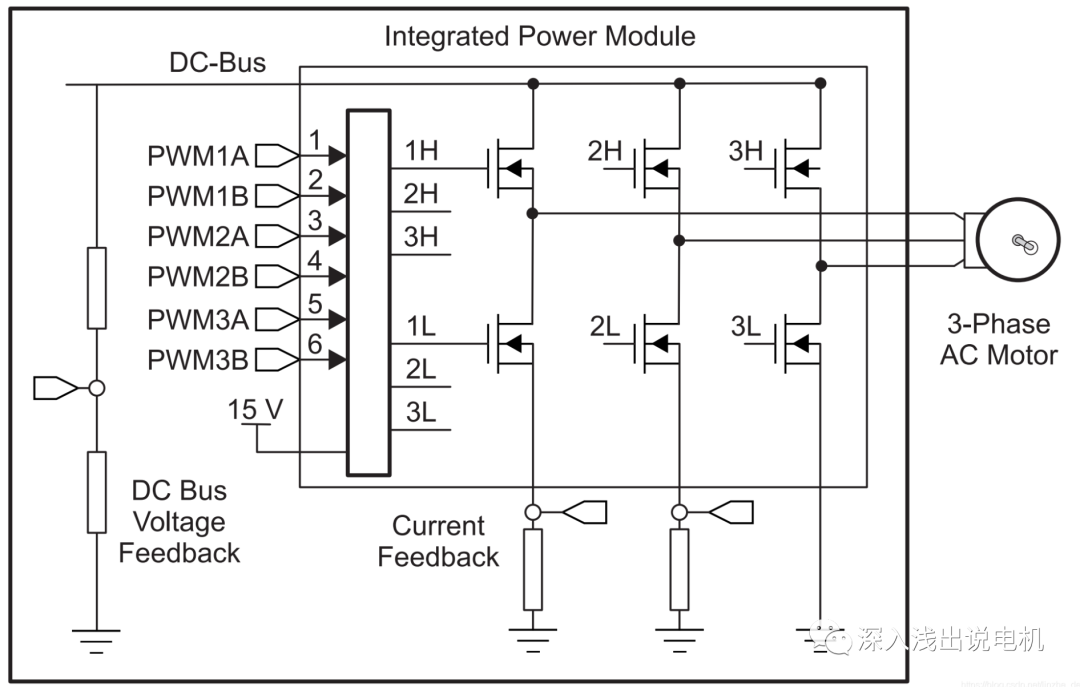
一般而言我们驱动电机采用的电路拓扑如上图(图片来自TI应用报告ZHCA555),我们能够直接控制的只有三个逆变电桥的输出电压,但是拖动电机旋转的磁场是由电流产生的,必须精准的控制电流才能精准的控制定子磁场。这时需要,对实际输出电流采样,将反馈电流分解到dq轴后很指令电流不断的比较,进而调节三相输出电压,使最终的输出电流等于指令电流。
电流调节器可以使用PI调节器实现,PI调节器对电机参数不敏感,该调节器假设输出电流随输出电压增加而增加,随着输出电压减小而减小。实际工作中,输出电流比指令电流大了就减小输出电压,实际电流比指令电流小了就增大输出电压。
五、FOC控制系统框图
综上,可以理出FOC控制系统的大致框架:
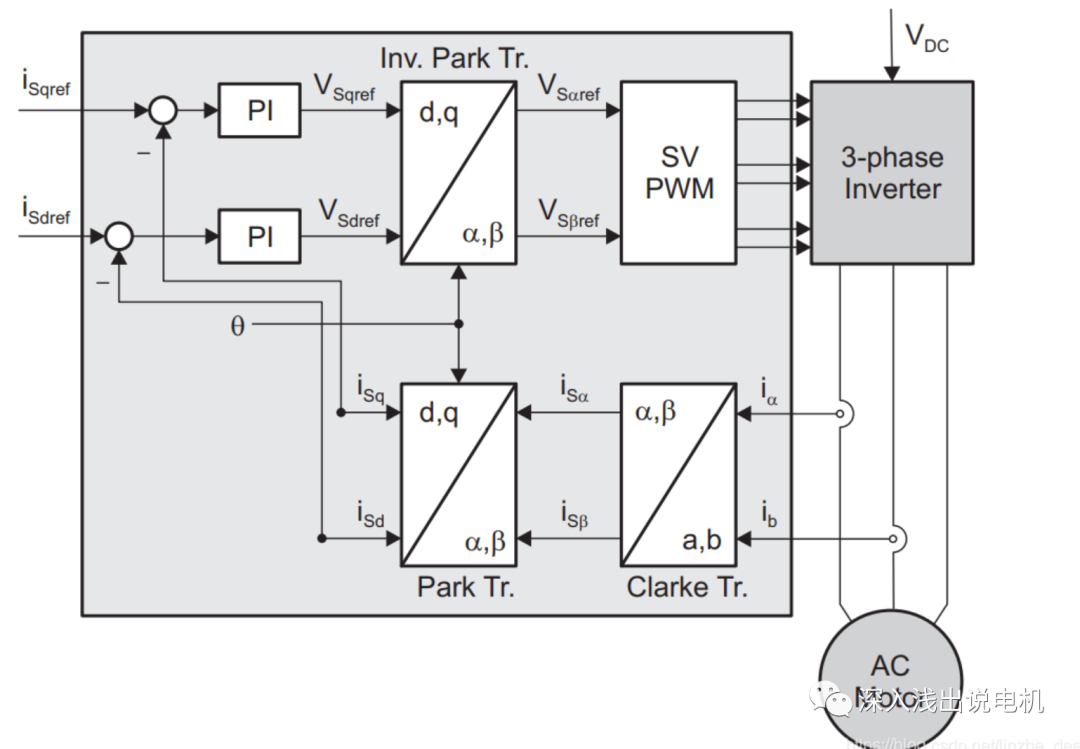
其中Clarke,Park模块实现了三相定子坐标系到直角转子坐标系的转换,把复杂的三相交流电流等效成了含义明确的两个直流量,励磁电流i ~d~ ,转矩电流i ~q~ ,使得能够使用控制直流电机的方法控制交流电机;图中i~sqref~为q轴指令电流,i~sq~为q轴反馈电流,i~sdref~为d轴指令电流,i~sd~为d轴反馈电流,实际控制中,对于隐极永磁同步电机d轴电流不做功,令i~sdref~ = 0,用i~sqref~控制电机扭矩,想让电机转的快一些就加大i~sqref~ ,反之,想让电机转的慢一些就减小i ~sqref~ ,想让电机反方向运行就给i~sqref~负值。V ~sqref~ ,V~sdref~分别为PI调节得到的q轴电压和d轴电压,上文提到逆变器的输出为电压量,只能通过调节输出电压来实现控制输出电流;Inv.Park模块和svpwm模块实现了输出等效于V ~sqref~ ,V~sdref~的三相电压。笔者文章[小白也能理解的中点平移法svpwm详细的对SVPWM技术进行了说明,并给出了实现方法及仿真结果。](http://mp.weixin.qq.com/s?__biz=Mzk0MjM3NDg3NA==&mid=2247483669&idx=1&sn=1def597174bff5100b14226c3cea8917&chksm=c2c56ba0f5b2e2b6306d9021b6d13baea621486ed5047cea8fdc58e98be6f7e1080370a71437&scene=21#wechat_redirect)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
LLC变换器基本理论及其设计2013-12-09 3149
-
干货-FOC控制精细理论2016-01-21 56463
-
【下载】基于STM32的永磁同步电机FOC控制理论基础2019-12-02 4706
-
有感FOC算法学习与实现总结2021-07-05 2889
-
IO设计基本理论2021-07-22 1891
-
SAW滤波器基本理论2008-11-17 5816
-
现代控制理论的总结2016-01-20 780
-
量子安全直接通信的基本理论和使用方案和发展趋势的总结与展望2018-12-21 2989
-
温差电的基本理论学习课件说明2020-10-10 1258
-
电工基本理论免费下载2020-12-14 1508
-
私藏电工基本理论免费下载2020-12-15 1201
-
异步电机的基本理论PPT课件下载2021-09-01 1552
-
Linux驱动基本理论常识2021-11-25 711
-
嵌入式--所有电机控制的FOC的总结2023-05-05 812
-
螺栓拧紧基本理论原理2023-12-04 2044
全部0条评论

快来发表一下你的评论吧 !
