

浅析Simplorer的永磁直流电机控制(中)
电子说
描述
接着插入零部件──半导体开关(Mosfet)
在组件库窗口中Simplorer Elements>>Basic Elements>>Circuit>>Semiconductor system Level,选择 Mosfet (MOS),将其拖放到 Schematic中,选择MOS并使用快捷键 Ctrl+R将其逆时针旋转90度,确保使用Pin被选中。
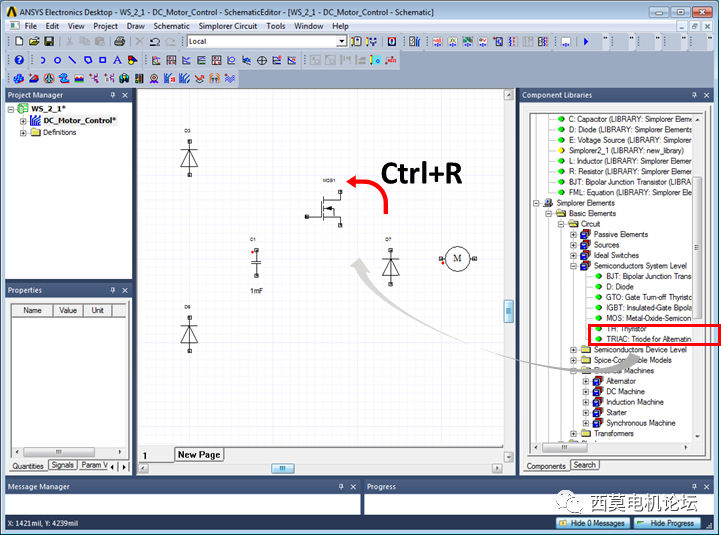
插入半导体开关(Mosfet)

确保使用Pin被选中
接下来连接组件。
将鼠标放在组件的一个终端上,鼠标指针的形状变为十字形,按下 LMB 并移动十字直到下一个组件的连接端子。添加Ground节点,单击图标 , 并将其放入Schemaic,连接所有组件,直到完成如图所示的电路。
, 并将其放入Schemaic,连接所有组件,直到完成如图所示的电路。

连接端子

驱动电路
接下来创建数据集。
现在将创建一个数据数组,用于表示直流电机负载扭矩。在库窗口Simplorer Elements>>Basic Elements>>Tools>>Time Functions,选择DATAPAIRS组件,将其拖放到Schematic中,双击DATAPAIRS块,将名称更改为TorqueLoad,然后单击Characteristic按钮。选择数据集...按钮,然后添加(创建新数据集)。

名称更改为TorqueLoad

单击Datasets

单击Add
将名称更改为Tload并根据以下内容输入时间/值对:
0 1
0.075 1
0.08 10
0.1 10
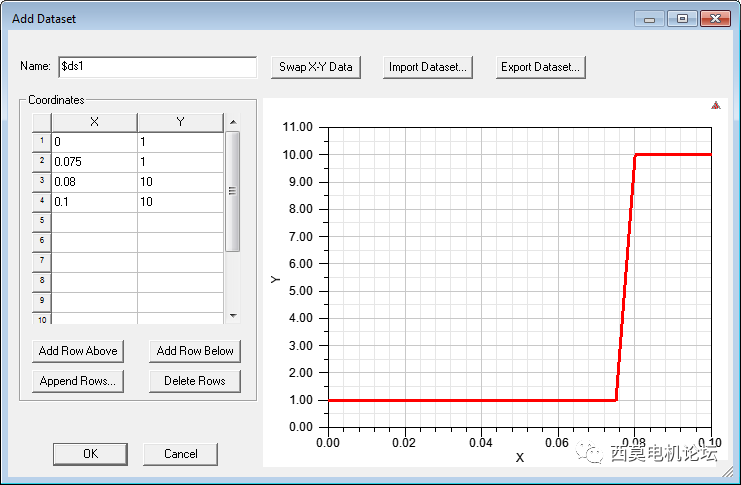
输入时间/值对
点击“确定”,然后“完成”,然后再“确定”,然后,点击确定退出所有窗口。
接下来向直流电机添加新的负载转矩。
再次双击TorqueLoad表查找块,选择输出/显示选项卡,取消选中输出值VAL的输出显示引脚框。双击DC Motor组件并将负载输入定义为刚刚创建的指定TorqueLoad.VAL的表查找块的输出。

取消选中输出值VAL的输出显示

负载定义为TorqueLoad.VAL
接下来添加控制方案。
控制方案由外部Speed Control回路和内部Current Control 回路组成。这两个控件有不同的目标,其中速度控制将电机驱动到1000rpm的固定速度,电流控制使电流不超过最大值,将其限制在20A左右的±2.5A范围内,要实现的完整方案如下图所示。

外部Speed Control回路和内部Current Control回路
接下来插入控制逻辑模块。
在组件库窗口中Simplorer Elements>>Basic Elements>>Blocks>>Continous Blocks,选择GAIN块并将其拖放到Schematic中3次,选择INTG(积分器)块并将其拖放到原理图中。在组件库窗口中Simplorer Elements>>Basic Elements>>Blocks>>Sources Blocks。选择CONST(常量值)块并将其拖放到原理图中,在组件库窗口中Simplorer Elements>>Basic Elements>>Blocks>>Signal Processing Blocks,选择 SUM块并将其拖放到Schematic中3次,选择TPH (Two-Point Element with Hysteresis) 块并将其拖放到Schematic中,选择LIMIT(限制器)块并将其拖放到Schematic中,将10个块排列如下图。

外部Speed Control回路和内部Current Control回路所需元器件
接下来设置组件可见性和属性。
为了在原理图上获得更好的组件可见性,建议检查高级属性转到菜单项Tools>>Options>>General Options>>Schematic Editor>>General 最终选中“显示高级属性数据”。在Tools>>Schematic Editor >>Fonts选择所需的字体类型和字体大小。 您还可以选中“应用此字体...活动原理图”框来修改已放置在原理图上的元素的可见性。准备好后,点击OK。
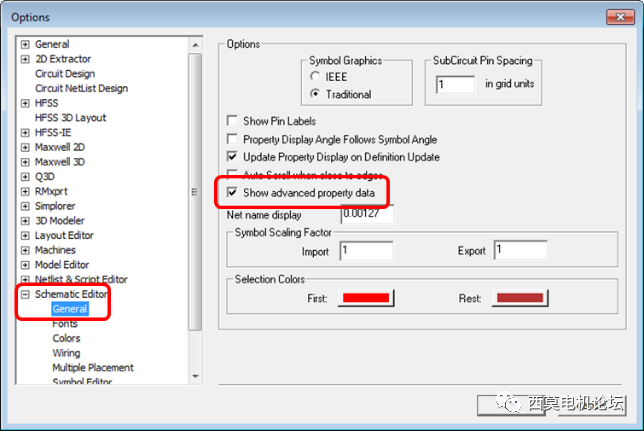
显示高级属性数据
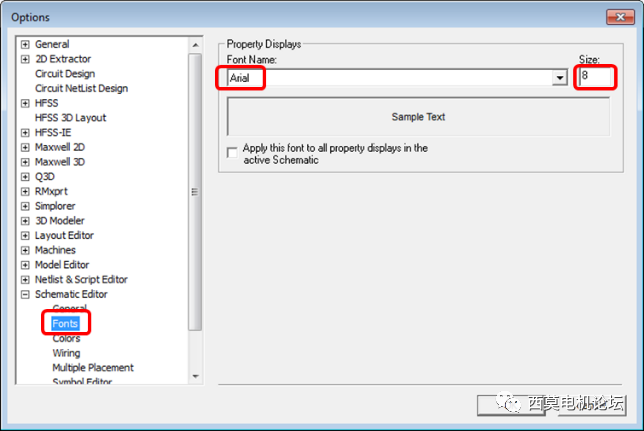
Fonts字体设置
接下来对齐组件。
为了使模块方案和一般每个电路更具可读性,使用Simplorer提供的对齐功能通常很有帮助,要水平对齐元素/块,首先选择要对齐的元素/块,然后转到菜单项 Draw>>Align Horizontal,要垂直对齐元素/块。先选择要对齐的元素/块,然后转到菜单项Draw>>Flip Vertical。

Align Horizontal与Flip Vertical
接下来修改增益模块属性。
双击GAIN1并将名称更改为Motor_speed,在Output/Display Tab, 不勾选Show Pin 而选INPUT,在参数选项卡INPUT设置为DCMP1.N(DC Motor Speed),KP设置为1,TS为0。

GAIN1(Motor_speed)
双击GAIN2并将名称更改为Proportional_Gain,在参数选项卡KP设置为50。

GAIN2(Proportional_Gain)
双击GAIN3并将名称更改为Motor Current,在Output/Display Tab, 不勾选Show Pin而选择INPUT,在参数选项卡INPUT设置DCMP1.IA (DC Motor Current),KP设置为1,TS设置为0。

GAIN3(Motor_current)
接下来修改求和模块属性。
按Ctrl键选择SUM1、SUM2和SUM3,执行RMB>>Flip Vertical,双击SUM1并将INPUT[0]的符号设置为“-”,保持SUM2不变,双击SUM3并将INPUT[1]的符号设置为to “-”。

SUM1
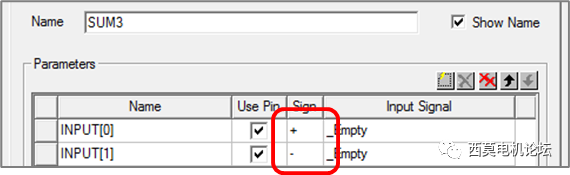
SUM3
-
 Tomdawn
2023-08-08
0 回复 举报谢谢楼主 收起回复
Tomdawn
2023-08-08
0 回复 举报谢谢楼主 收起回复
-
永磁直流电机实用设计及应用技术2025-03-31 3241
-
永磁无刷直流电机的控制方法2024-06-03 3782
-
永磁无刷直流电机的基础知识2023-03-23 6844
-
无刷直流电机、永磁同步电机及FOC控制算法简介2023-03-09 1107
-
什么是直流电机 直流电机的励磁方式2023-03-01 7190
-
永磁直流电机的原理和设计与定制2022-02-22 6067
-
永磁无刷直流电机简介2021-09-15 2020
-
永磁无刷直流电机与永磁同步电机有哪些不同点啊2021-08-12 3046
-
永磁直流电机的原理2021-01-21 4393
-
永磁直流电机出现锈斑的原因_永磁直流电机锈斑的处理办法2020-04-03 3223
-
【秀秀资源】永磁同步电机和无刷直流电机干货资料分享2017-02-15 17762
-
永磁无刷直流电机设计-英文2016-12-13 1396
-
直流电机2010-01-09 4517
全部0条评论

快来发表一下你的评论吧 !
