

关于激光雷达的小知识
电子说
描述
激光的理论基础源于物理学家爱因斯坦在1917年提出了 “光与物质相互作用”的技术理论。
理论指出组成物质的原子中,处在高能级的粒子受到某种光子的激发会从高能级跃迁到低能级。
同时释放一个与激励光子有着完全相同的频率、相位、传播方向以及偏振状态的光子,受激发射出的光被称为 LASER,也就是激光。
目前在具有ADAS高级驾驶辅助功能的汽车上所使用的激光雷达就是利用激光的特性。将激光作为光源,利用光束扫描来探测汽车周边行人及物体的距离和移动速度。
车辆要实现L3级以上级别智能驾驶,激光雷达已经是必不可少的配置。激光雷达的基本工作原理是采用激光发射器及光束扫描技术发射介于红外线与可见光之间的激光,通过测量激光反馈信号的时间差及相位差来描绘周围目标对象的三维点云图,从而能够获取目标对象精确的距离、和轮廓信息。
激光雷达对比其他类型的如毫米波雷达和单、双目摄像头,从可靠度、行人判别、夜间模式、恶劣天气环境、细节分辨、探测距离等方面来对比,其综合性能最优:
相比于毫米波,激光雷达使用的激光波长在千纳米级别,目前主流的激光雷达发射的激光波长为905nm和1550nm,有更好的指向性,不会拐弯,也不会随着距离的增大而扩散。相比于摄像头, 激光雷达不会受到像素和光线的制约。
高频激光可以在一秒内获取约 150 多万个位置的点云信息,因此可以精确地还原周围环境的三维特征。
激光雷达的探测精度在厘米级以内,因此激光雷达能够准确的识别出障碍物具体轮廓、距离,且不会漏判、误判前方出现的障碍物。
自然界中很少存在能对激光产生干扰的信号,因此激光雷达具有非常强的抗干扰能力。
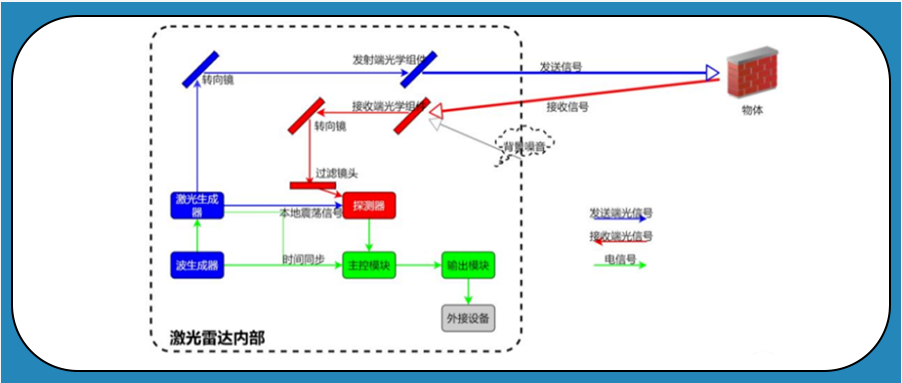
激光雷达主要由发射模块、接收模块、信息处理模组和扫描模组构成,其中发射模组组件主要包括激光驱动 IC激光器、激光调制器及发射光学系统。
激光发射模块的工作原理是通过采用激励方式周期性地驱动激光器发射激光脉冲,并利用激光调制器控制激光发射的方向以及线数,最后通过发射光学系统将激光发射至目标物体上。
接收模块负责接收回波,并将回波反射至探测器;探测器负责将光信号转换至电信号。信息处理模块目前通常为ASIC 芯片及其相关驱动电路,用于时序控制、波形算法处理并计算生成最终点云数据。
激光雷达的模块结构如图所示:
-
关于基于低成本激光雷达避障智能小车的技术研究2016-10-11 0
-
激光雷达分类以及应用2017-09-19 0
-
常见激光雷达种类2017-09-25 0
-
激光雷达面临的机遇与挑战2017-09-26 0
-
消费级激光雷达的起航2017-12-07 0
-
北醒固态设计激光雷达2018-01-25 0
-
固态设计激光雷达2018-01-25 0
-
机器人和激光雷达都不可或缺2019-02-15 0
-
TOF激光雷达2019-06-07 0
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 0
-
激光雷达2021-01-17 0
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 0
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 0
-
如何设计一款适合于果园应用的激光雷达2021-11-12 0
-
硅谷激光雷达Cepton:11个关于激光雷达的“谣言”2019-03-09 4642
全部0条评论

快来发表一下你的评论吧 !
