

MEMS传感器的不动带宽测试
描述
对于使用MEMS加速度计和陀螺仪的工业系统,优化带宽可能是一个关键的考虑因素。这在精度(噪声)和响应时间之间形成了一个经典的权衡。虽然大多数MEMS传感器制造商指定了典型带宽,但通常需要验证传感器或整个系统的实际带宽。表征加速度计和陀螺仪的带宽通常采用振动台或其他机械激励源。准确的表征需要全面了解应用于被测器件(DUT)的运动。在此过程中必须管理多个潜在的错误源。机械带宽表征中一个常见的误差来源是谐振。机械共振可能是由于激励源维护不善、与激励源的 DUT 耦合不良、参考传感器放置和其他源造成的。隔离这些类型的错误可能非常耗时,并且会给关键项目进度带来风险。
大多数MEMS传感器都具有自检功能,能够在关键任务应用中部署之前测试传感器。此功能练习传感器的机械结构,以模拟其设计要测量的外力。此诊断还可用于模拟步进输入功能。对此步骤输入的响应提供了有关传感器带宽的有用见解。例如,ADIS16080偏航角速率陀螺仪的频率响应主要由其初级低通滤波器主导,该滤波器设置为40 Hz。对于施加在自检引脚上的阶跃输入,预期会出现以下响应:
r(t) = 1 - e-T2PF
传感器阶跃响应和带宽之间的这种简单关系可以提供有助于验证过程的线索。指数响应的时间常数是输出达到其最终值变化的 63.2% 时。对于 40 Hz 单极点系统,这将在施加阶跃响应后约 4 ms 发生。
确定传感器的阶跃响应可用于隔离带宽表征期间观察到的谐振条件。图1显示了使用ADIS16080的系统的频率响应。该图显示了 100 Hz 时的共振。乍一看,我们不知道这种共振是由于传感器的行为,还是由系统中的机械共振引起的。幸运的是,由自检功能确定的阶跃响应可以区分这两种效应。图2提供了两种情况的曲线图:测试设置或传感器本身产生的共振。
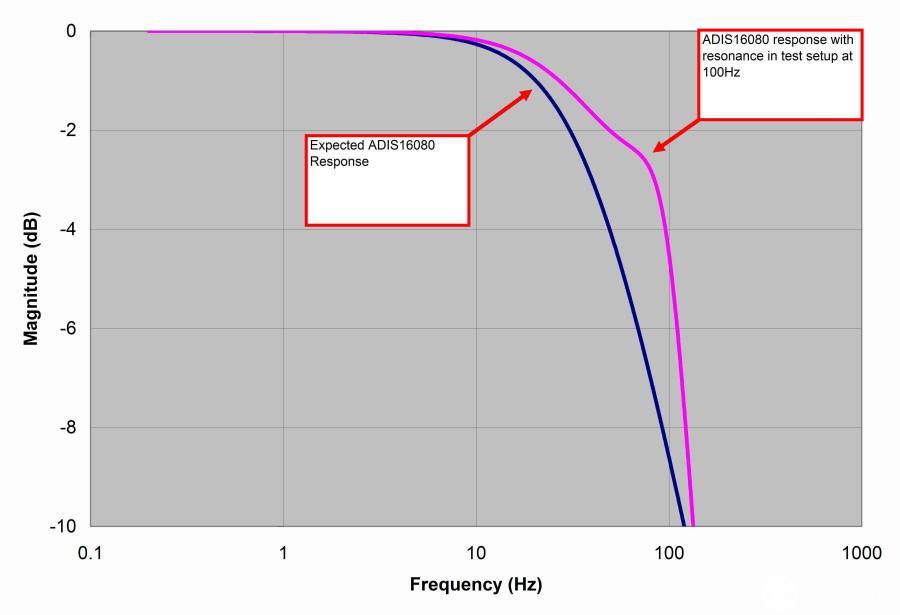
图1.具有 100 Hz 谐振的系统频率响应
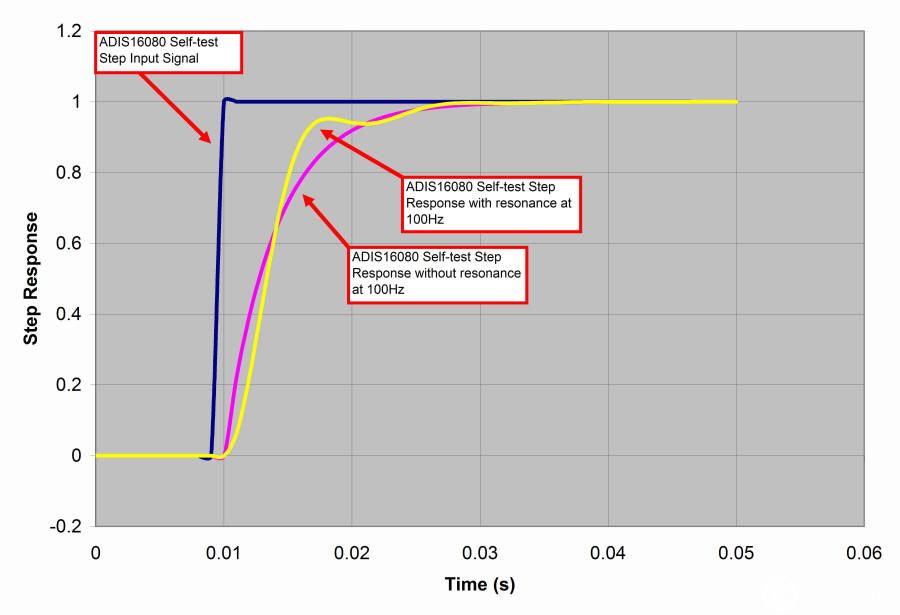
图2.带或不带 100 Hz 谐振的传感器阶跃响应
使用此技术时,请记住,它依赖于在阶跃响应和频率响应之间建立关系。随着过滤器结构变得越来越复杂,建立此链接变得更加困难。例如,2 极 56 Hz 系统的时间常数与单极 40 Hz 系统的时间常数相同。此外,步进输入信号的上升时间必须超过DUT的响应时间。自检功能本身的缓慢响应会影响整体响应,并使传感器出现带宽较低。
该技术提供了一种独立的方法来隔离MEMS传感器频率响应中的意外行为。它还提供了快速检查制造商带宽声明的能力,而无需任何机械激励。
审核编辑:郭婷
-
mems传感器是什么意思_mems传感器原理是什么2024-10-18 9500
-
mems传感器的主要种类有哪些 mems传感器应用领域有哪些方面2023-07-26 5231
-
不同类型MEMS传感器的比较 MEMS传感器的工作原理2023-06-13 10348
-
SPEA:MEMS传感器测试有望实现低成本、高效益?2022-09-13 2348
-
MEMS传感器转台测试设备2021-12-13 3327
-
MEMS惯性传感器的测试及应用领域2020-05-18 6233
-
最新MEMS传感器的新特性:不动带宽测试2019-04-12 2789
-
MEMS传感器四大应用领域详解2018-11-07 4885
-
基于闭环MEMS的电容式惯性传感器设计2018-11-06 2079
-
汽车电子MEMS传感器的应用2016-12-07 5373
-
MEMS传感器的分类2013-10-11 7676
-
MEMS传感器的静止带宽测试2012-12-13 1284
-
MEMS传感器及其应用2012-08-14 4201
全部0条评论

快来发表一下你的评论吧 !
