

 Windows实时运动控制软核(六):LOCAL高速接口测试之Matlab
Windows实时运动控制软核(六):LOCAL高速接口测试之Matlab
电子说
描述
今天,正运动小助手给大家分享一下MotionRT7的安装和使用,以及使用Matlab对MotionRT7开发的前期准备。
01 MotionRT7简介
MotionRT7是深圳市正运动技术推出的跨平台运动控制实时内核,也是国内首家完全自主自研,自主可控的Windows运动控制实时软核。

1.MotionRT7具备以下特点
(1)独立软件安装,适合各种Windows电脑;绿色免安装,快速体验;采用硬件绑定的运行许可证授权(未授权也可试用);可以方便配置、启动、连接、模拟运行等。
(2)与MotionRT其它版本功能兼容,一次开发,可快速切换到嵌入式,Linux各种平台。
(3)统一函数库接口,快速的本地LOCAL接口,运动函数调用快至us级别,比普通PCI卡快数十倍。
(4)集成机器视觉,快速搭建各类运动控制+机器视觉的实时应用。
(5)强大多卡功能,最多240轴联动,支持跨卡联动,脉冲与总线联动,振镜与平台联动,轻松实现位置锁存/PSO等高级功能。
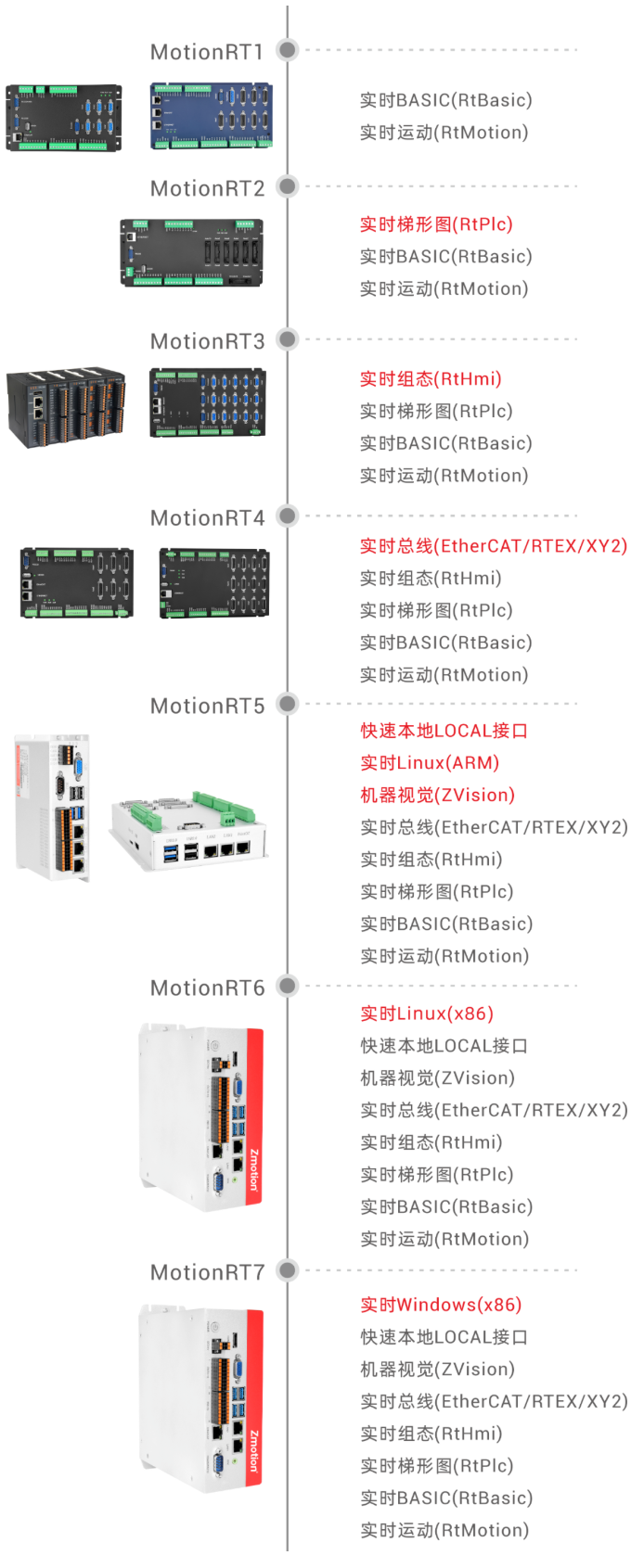
2.持续迭代的运动控制实时内核MotionRT
MotionRT是正运动技术持续建设与发展的运动控制实时内核,已不断迭代7代,从MotionRT1到MotionRT7。
3.MotionRT7采用模块化软件架构
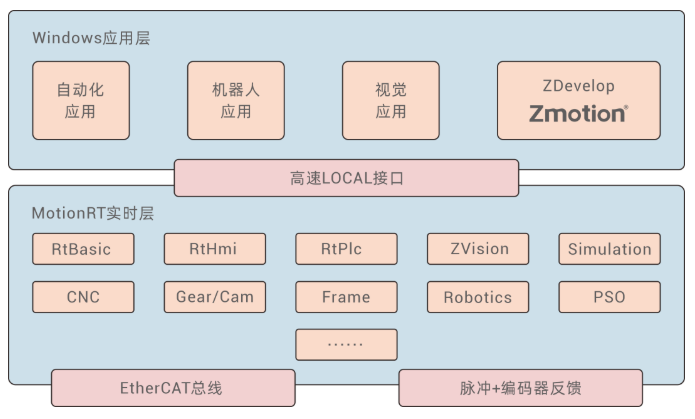
运动控制程序、视觉算法、MotionRT7运动控制引擎,通过高共享内存进行数据交互,大大提升运动控制与机器视觉的交互效率。用户自定义功能,融合Gmc、Gear/Cam、Frame、Robotics、CNC等算法,打造用户的专用控制系统。
4.统一开放的API函数
统一完善的SDK库,所有的第三方开发环境同用一套API接口,跨平台的产品架构,提高效率,保持兼容性。

5.简单易用的运动控制功能特性
a.点位运动、直线插补、圆弧插补、螺旋插补、连续轨迹加工;
b.电子凸轮、电子齿轮、同步跟随、位置锁存、虚拟轴叠加;
c.S曲线加减速,SS曲线加减速,轨迹运动更柔和;
d.1D/2D/3D高速位置同步输出PS0,充分满足视觉飞拍、高速点胶、激光加工;
e.客户可自定义运动控制算法或者机器人正反解算法;
f.方便与第三方视觉配合。
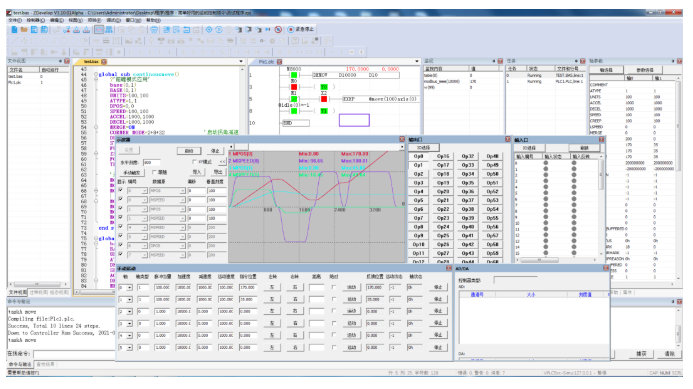
6.开放的EtherCAT与配置调试工具
ZDevelop具备开放易用的配置,开发,调试,诊断等工具。ZDevelop不仅是个绿色免费的软件,而且具备轴调试,轴状态,示波器等工具。
MotionRT7广泛支持EtherCAT总线,支持市面上广泛易用的EtherCAT伺服,EtherCAT步进,EtherCAT IO,EtherCAT阀岛和EtherCAT传感器。
我司后续将持续完善EtherCAT的配置工具,持续努力做最好用的运动控制。
02 MotionRT7的安装和使用
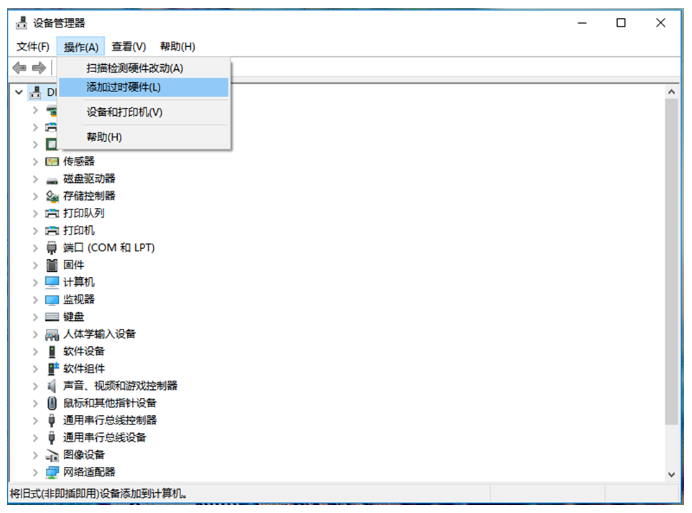
第一步:安装驱动程序
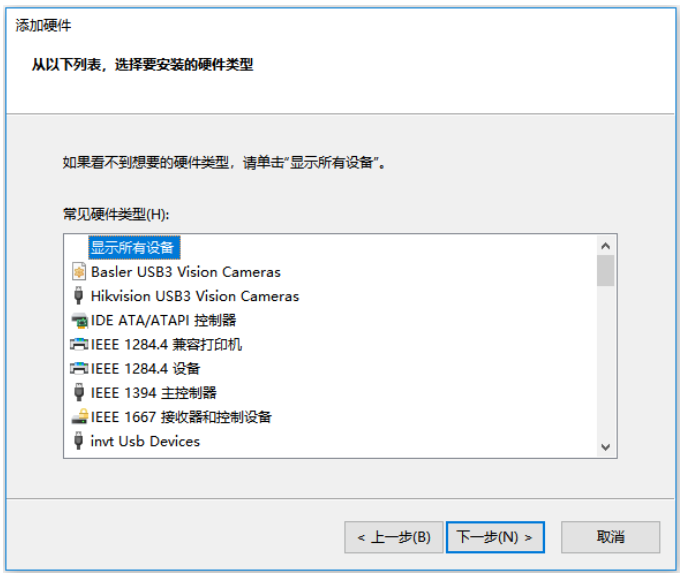
1.打开“设备管理器”,选择“操作”中的“添加过时硬件”,选择“手动选择”。

2.点击“下一步”。
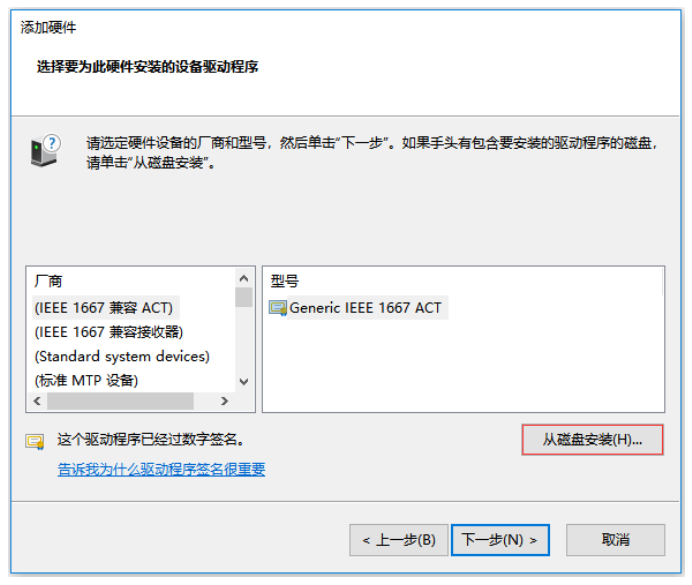
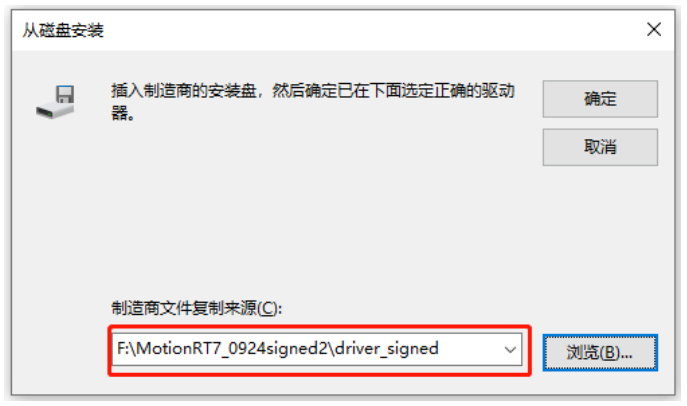
3.点击“从磁盘安装”。
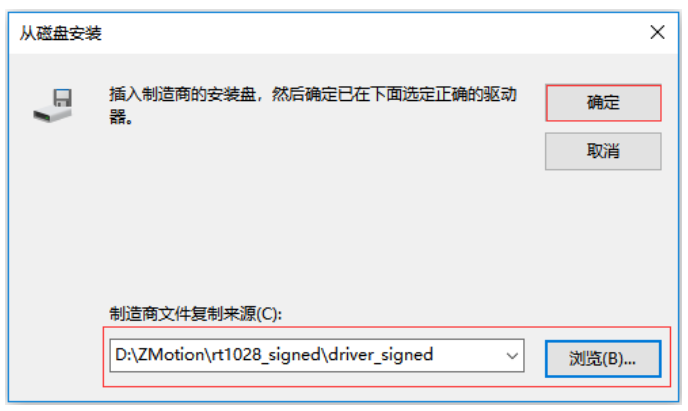
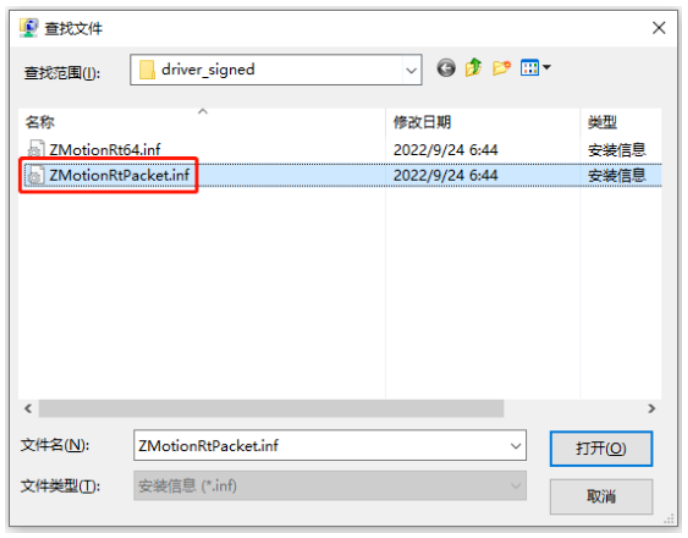
4.点击“浏览按钮”选择驱动所在的路径,打开文件夹“driver_signed”,选择“ZMotionRt64.inf”。
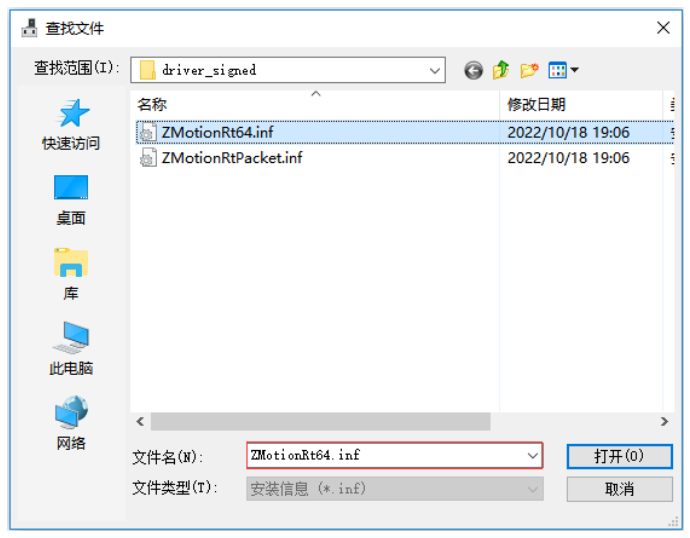
5.一直点击下一步,直到安装完成。
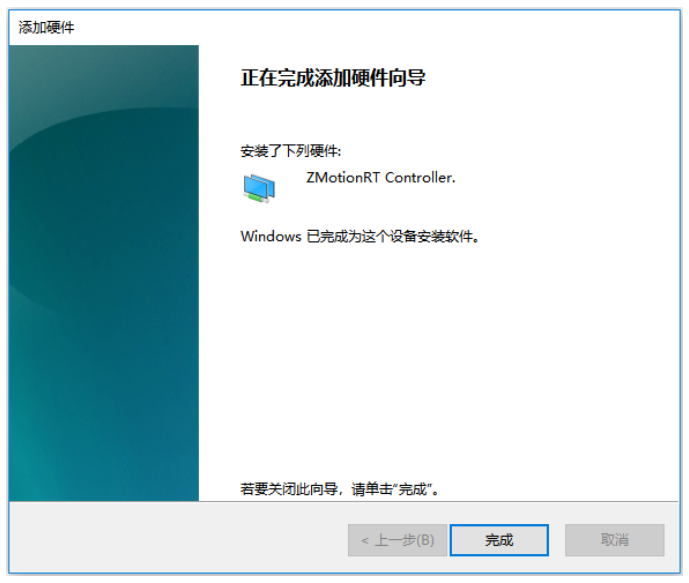
注意:驱动更新时,要从设备管理器删除设备,一定要选择把驱动文件也删除。
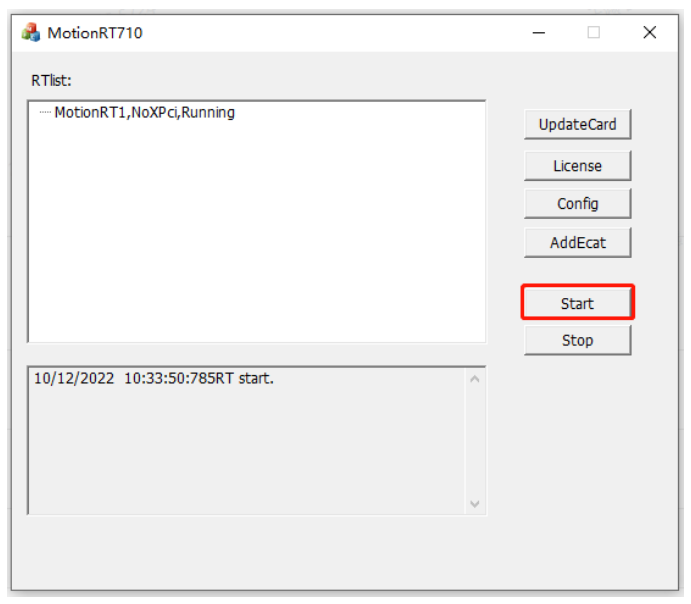
第二步:运行控制台程序
1.打开控制台程序所在位置,运行可执行文件“MotionRt710.exe”。

2.点击“Start”。
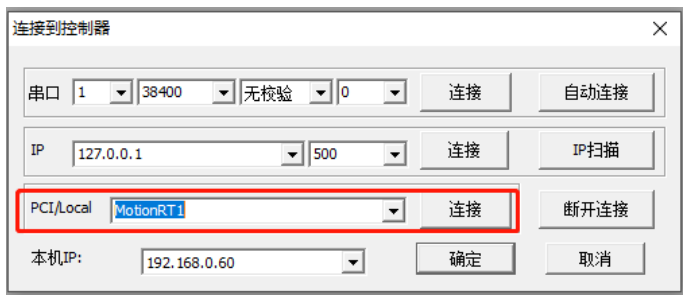
第三步:使用ZDevelop软件链接到控制器,进行参数监控
ZDevelop链接控制器,软件版本3.10以上,使用PCI/LOCAL方式进行连接。

第四步:网口扩展EtherCAT主站协议
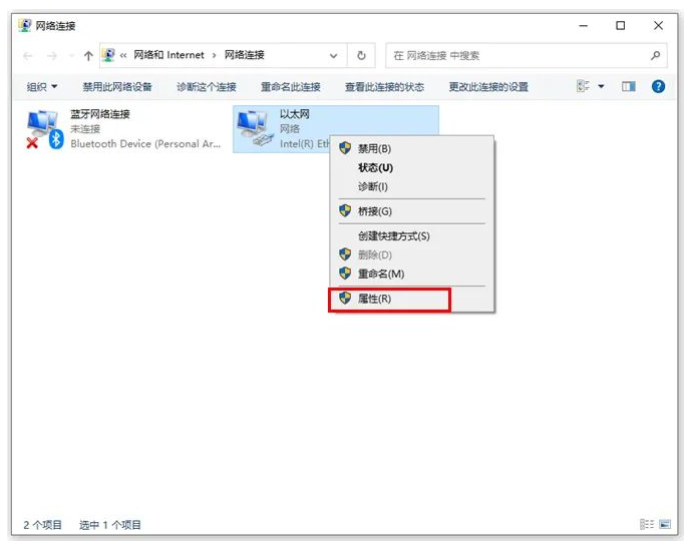
1.查看网络连接。
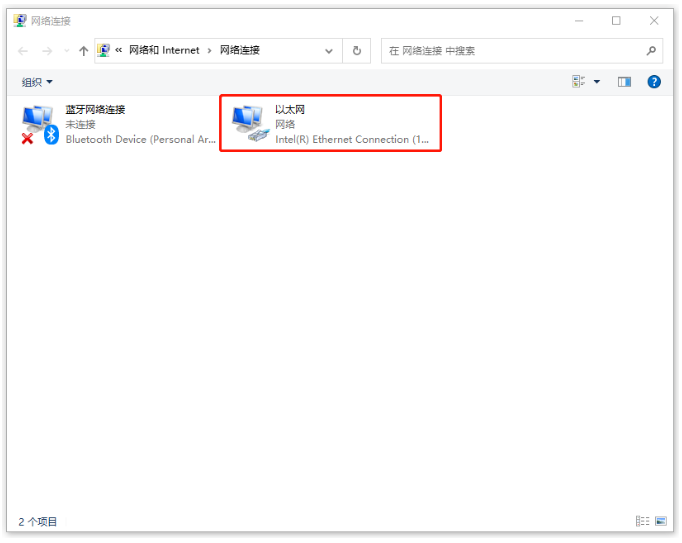
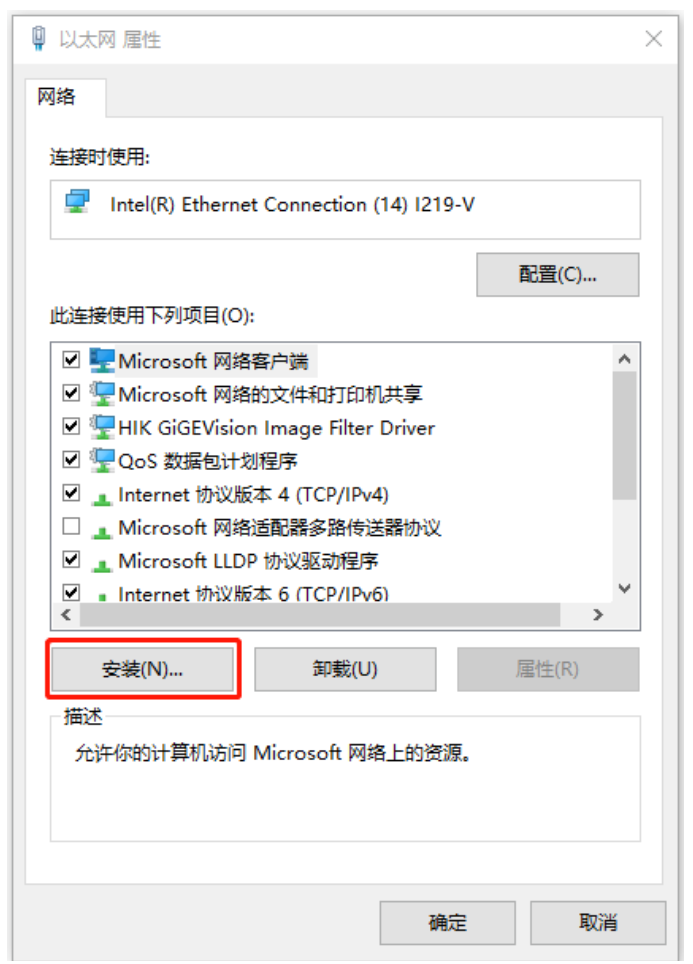
2.选择用作EtherCAT的网卡,右键属性,安装协议。
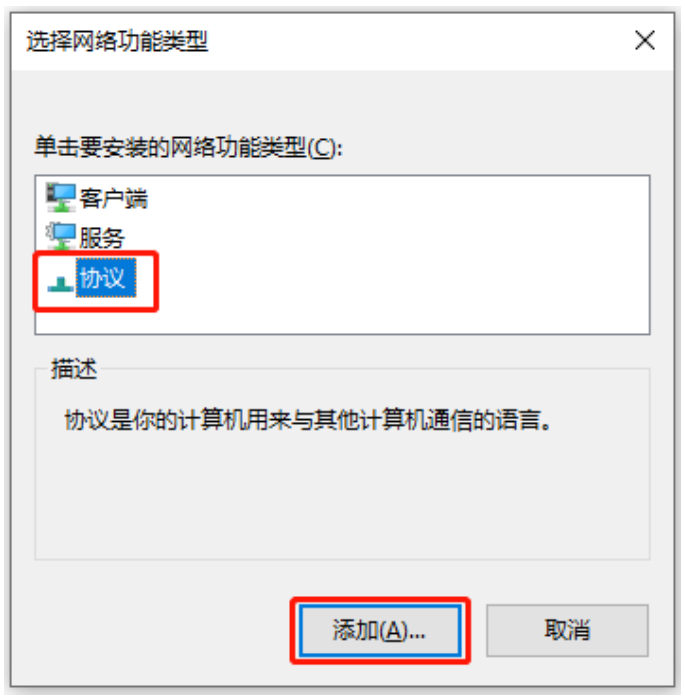
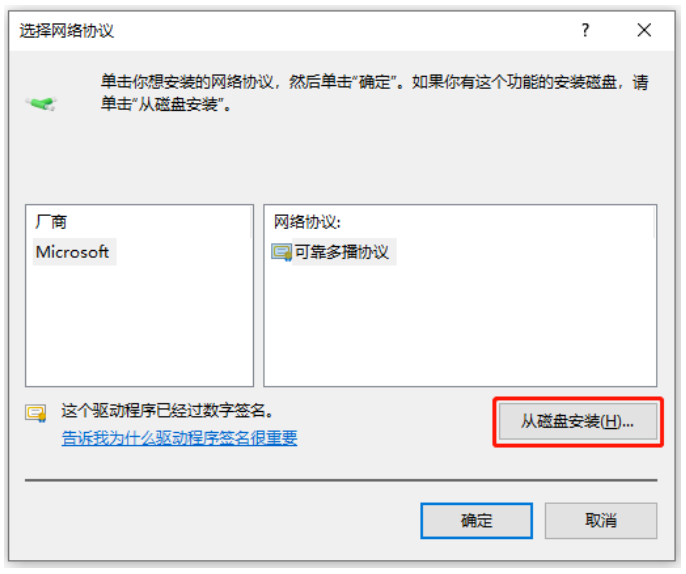
3.点击从磁盘安装,选择驱动器所在的路径,打开文件夹”driver_signed”,选择“MotionRtPacket.inf”。
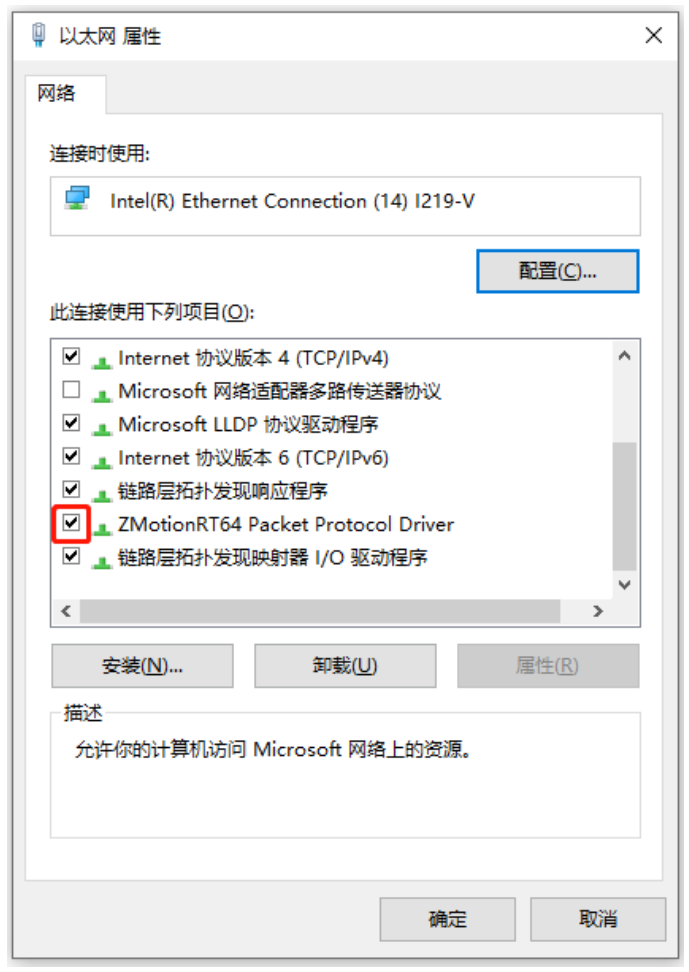
4.安装成功后,确认ZMotionRT64 Packet Protocol Driver前面有选上。
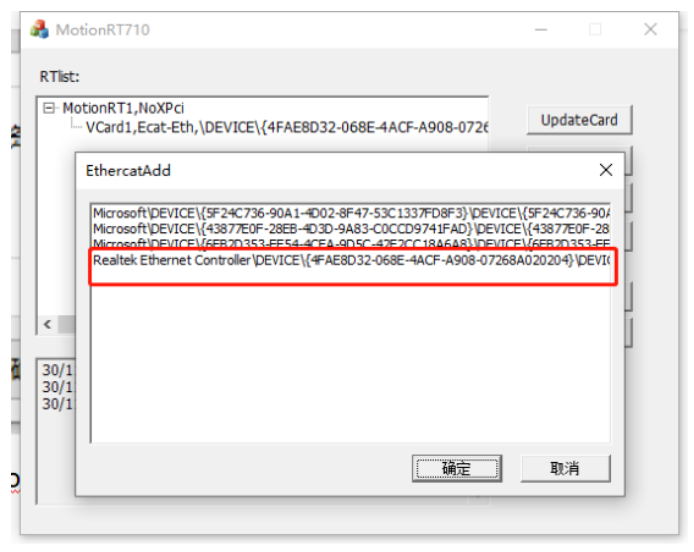
在RT控制台程序选择增加AddEcat,这时能看到对应网卡,选择后,启动RT。
自带PC网卡EtherCAT具有一定的实时性,若EtherCAT要提升性能,则需要把网口其它的协议都去掉以提升实时性。如需进一步提升实时性,请使用正运动专门的EtherCAT运动控制卡XPCIE1032。更多关于MotionRT7的参数设置以及相关问题,请参照“MotionRT7说明书”。
相关资料请前往正运动技术官网www.zmotion.com.cn或联系正运动相关人员。
03 Matlab进行MotionRT7项目的开发
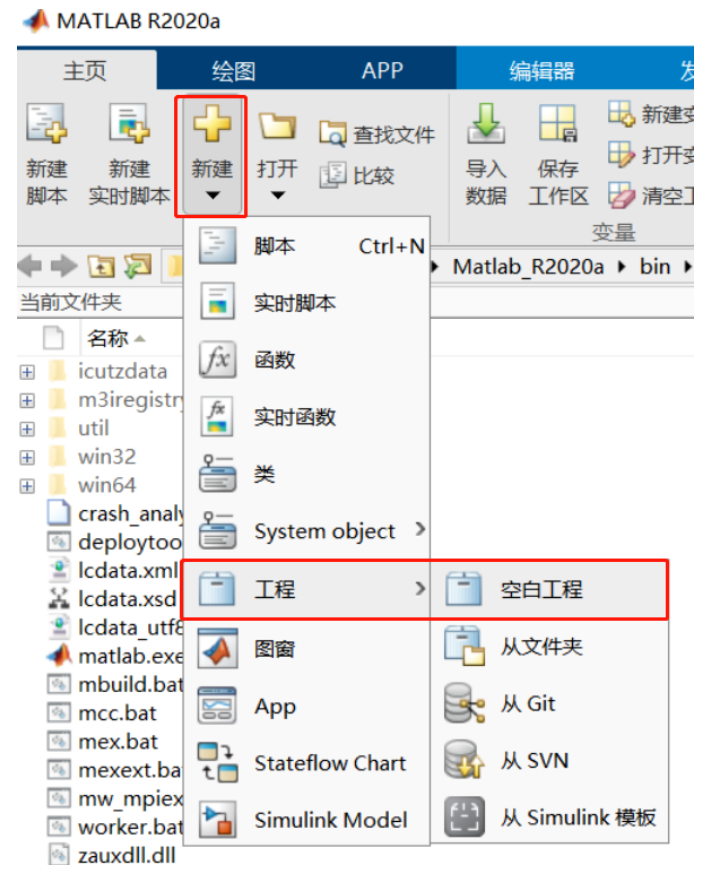
1、打开MATLAB R2020a,新建工程:菜单“主页”→“新建”→“工程”→“空白工程”,启动创建项目向导。
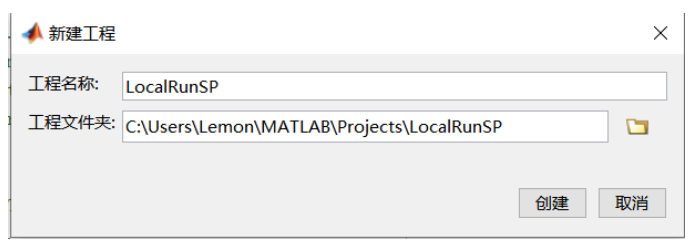
2、选择工程保存路径,设置工程名,点击创建。
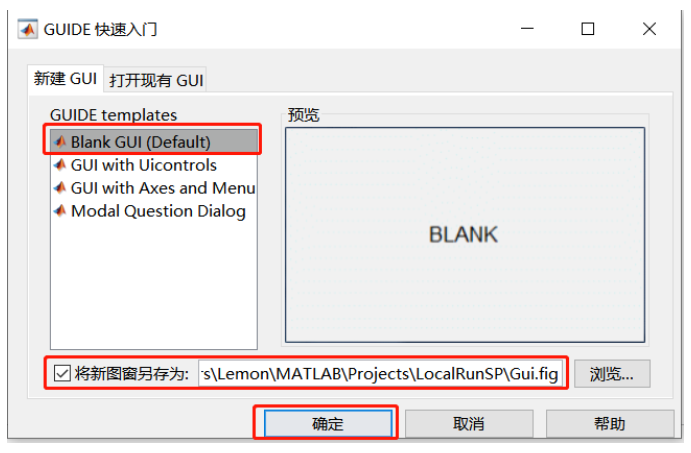
3、命令行输入GUIDE新建GUI。
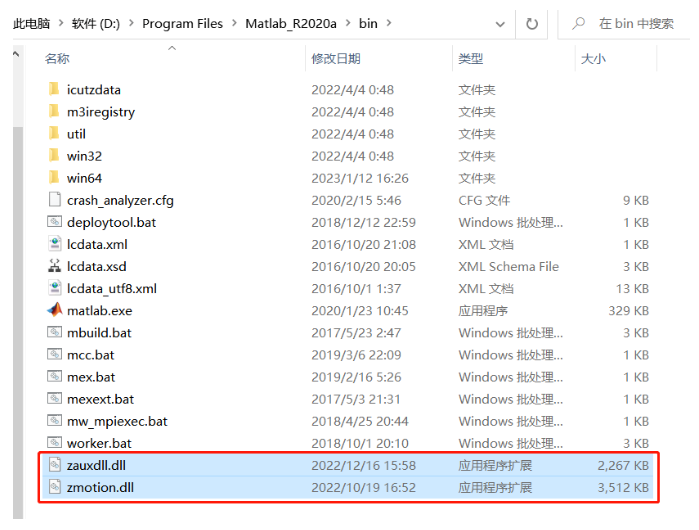
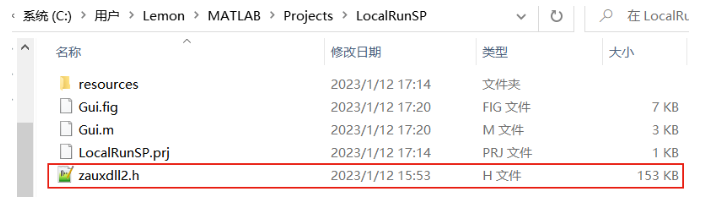
4、将产品配套光盘“..函数库dll”文件夹中的动态链接库“zmotion.dll”、“zauxdll.dll”复制到MATLAB工作目录中。
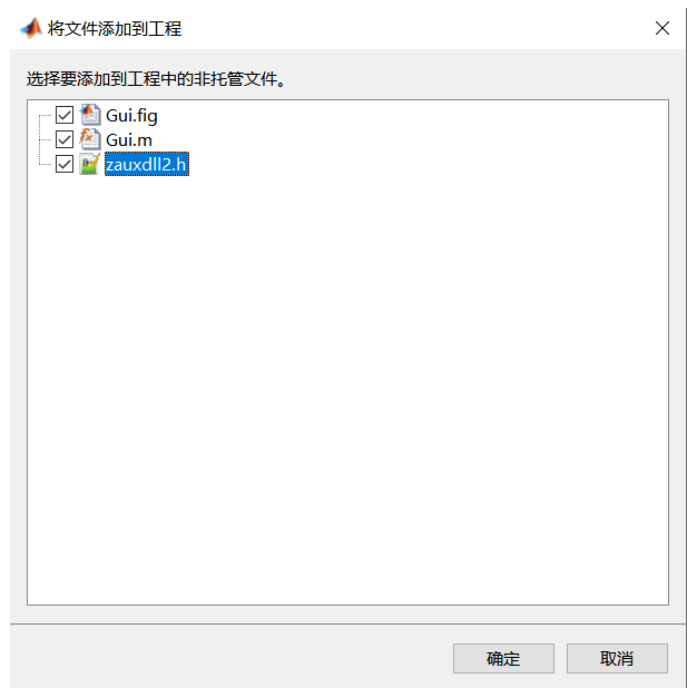
5、头文件“zauxdll2.h”复制到工程文件夹中。
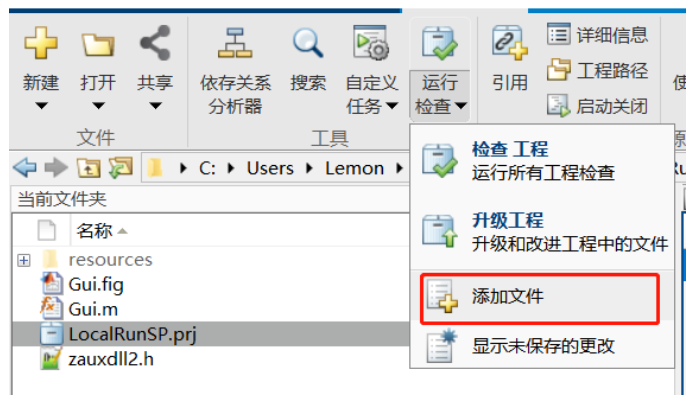
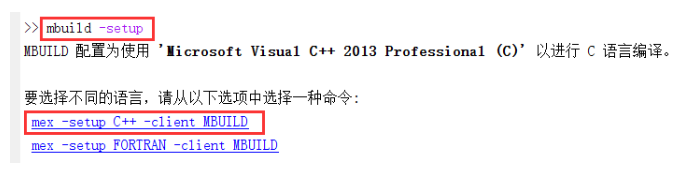
6、配置MATLAB开发环境。
(1)在matlab命令行输入mbuild -setup以及mex -setup,选择安装的c语言编译器。
(2)使用loadlibrary('zauxdll.dll','zauxdll2.h'),加载函数库。

(3)libfunctions zauxdll-full或libfunctionsview zauxdll,显示共享库函数签名。
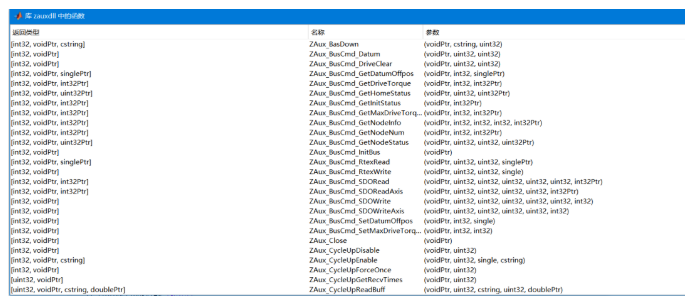
7、使用calllib调用zauxdll函数库中函数,详细可查看MATLAB帮助。
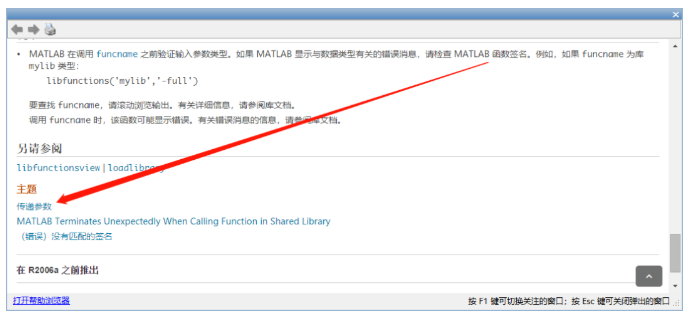

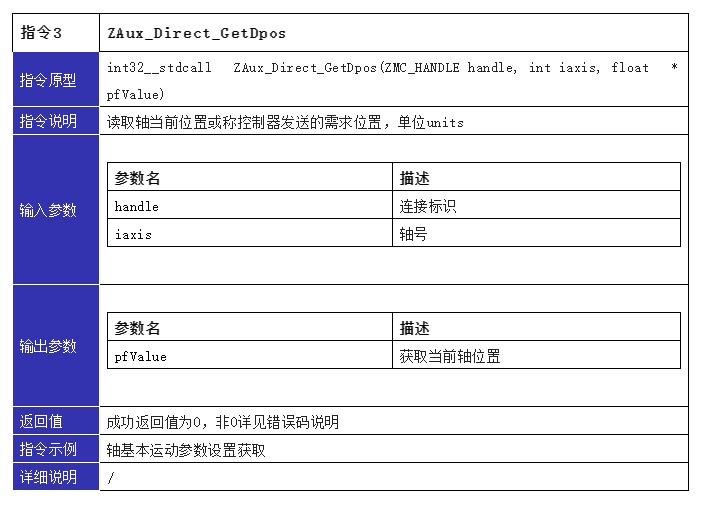
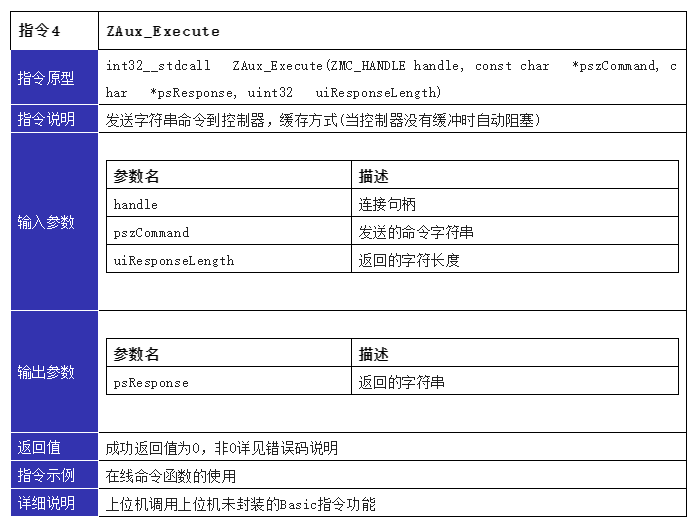
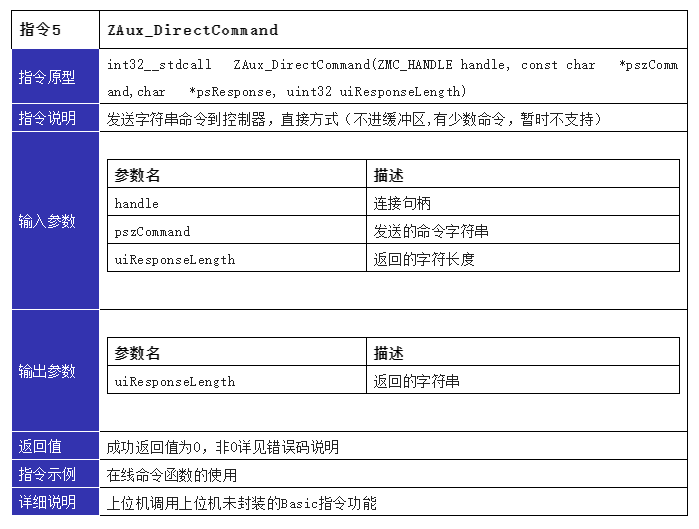
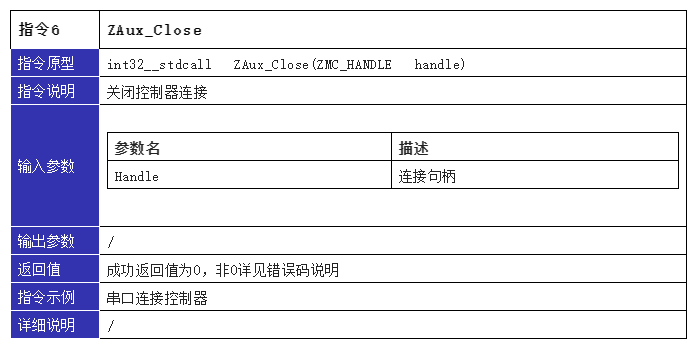
至此,用户就可以在MATLAB函数库中调用任意函数并编写应用程序,具体函数的用法及功能可以参考光盘资料ZMotion PC函数库编程手册。
(1)相关PC函数介绍
在MATLAB的GUI设计界面,找到需要用到的控件拖拽到窗体中进行UI界面设计,效果如下。
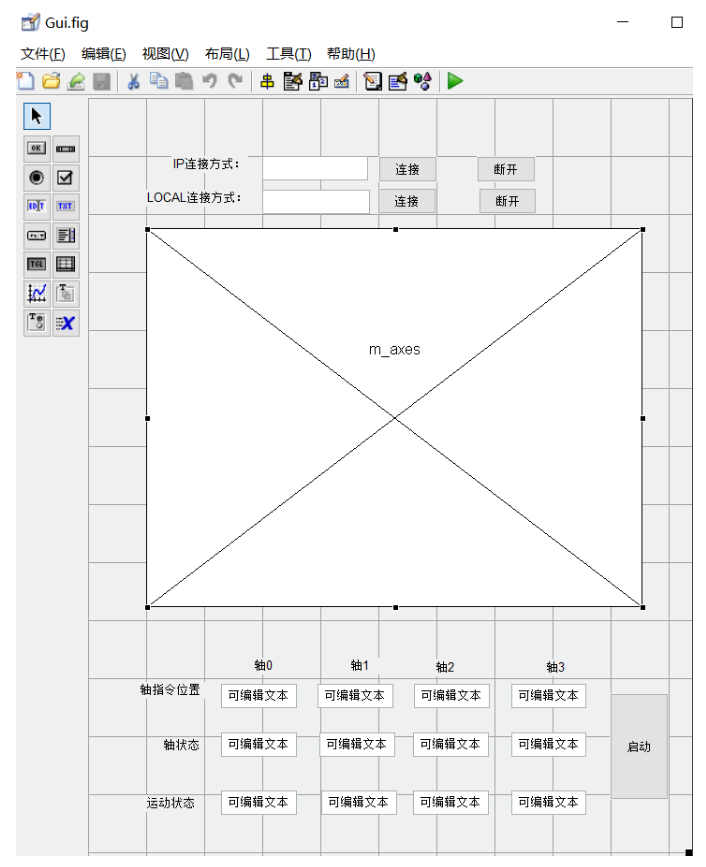
注:使用IP模式连接MotionRT7的时候,要将motionRT710中的Config配置项Eth num的值设置为一个大于0的数(1-12),输入的IP为本机IP,可以在ZDevelop中直接查看。
(2)相关代码
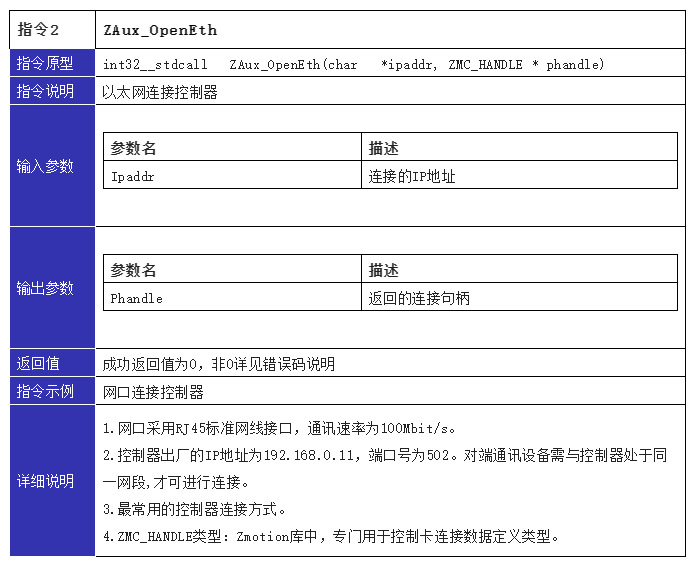
①通过IP链接方式的链接按钮的消息响应函数来链接控制器。
% --- IP链接方式链接控制器Executes on button press in btn_open_eth. function btn_open_eth_Callback(hObject, eventdata, handles) global g_handleptr;%定义连接句柄 calllib('zauxdll','ZAux_Close',g_handleptr); str_zmc_connect =get(handles.edit_ip,'String'); disp("连接控制器:"+str_zmc_connect); [res,~] = calllib('zauxdll','ZAux_OpenEth',str_zmc_connect ,g_handleptr); commandCheckHandler("ZAux_OpenEth",res); if res==0 fprintf('ETH连接控制器成功n'); set(gcf,'NumberTitle', 'off', 'Name', '(网口连接成功)'); else fprintf('ETH连接控制器失败,错误码%dn',res); set(gcf,'NumberTitle', 'off', 'Name', '(未连接)'); msgbox('Connection failure,Please check the IP!');%连接控制器失败,请检查IP地址 return; end
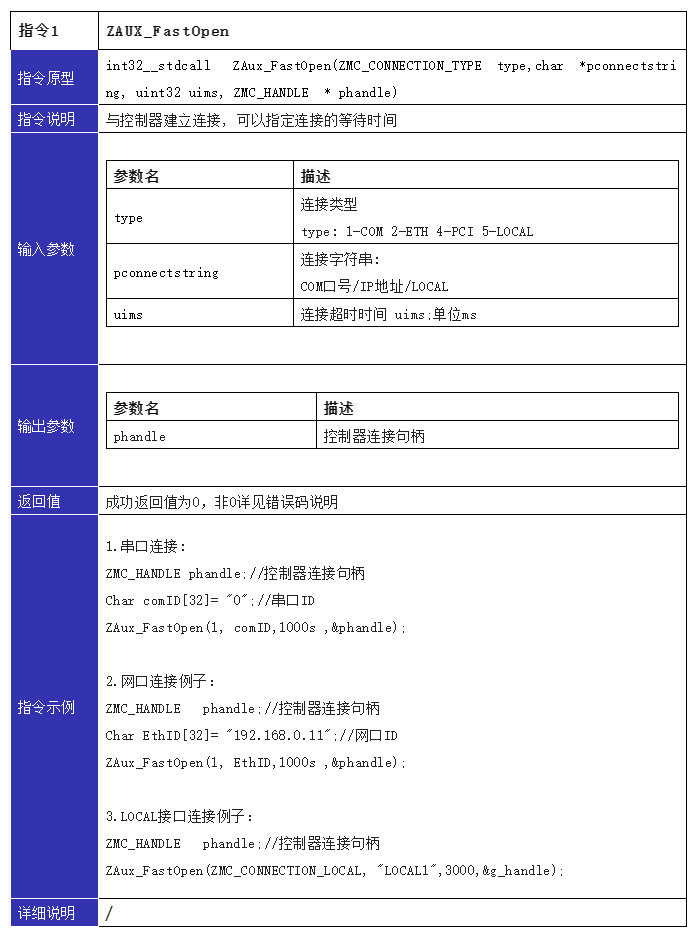
②通过LOCAL链接方式的链接按钮的消息响应函数来链接控制器。
% --- Local链接方式链接控制器Executes on button press in btn_open_local. function btn_open_local_Callback(hObject, eventdata, handles) global g_handleptr;%定义连接句柄 calllib('zauxdll','ZAux_Close',g_handleptr); str_zmc_connect =get(handles.edit_local,'String'); disp("连接控制器:LOCAL"); [res,~] = calllib('zauxdll','ZAux_FastOpen',5,str_zmc_connect ,3000,g_handleptr); commandCheckHandler("ZAux_FastOpen",res); if res==0 fprintf('LOCAL连接控制器成功n'); set(gcf,'NumberTitle', 'off', 'Name', '(LOCAL连接成功)'); else fprintf('连接控制器失败,错误码%dn',res); set(gcf,'NumberTitle', 'off', 'Name', '(未连接)'); msgbox('Connection failure,Please check the LOCAL!');%连接控制器失败,请检查IP地址 return; end
③通过断开按钮的消息响应函数来断开控制器的链接。
% ---断开连接 Executes on button press in btn_close. function btn_close_Callback(hObject, eventdata, handles) global g_handleptr;%定义连接句柄 [res,~] =calllib('zauxdll','ZAux_Close',g_handleptr); commandCheckHandler("ZAux_FastOpen",res); disp("关闭与控制器连接");%打印
④通过启动按钮下载basic文件并实时获取轴坐标进行绘制测试。
% --- 启动Executes on button press in btn_test1. function btn_test1_Callback(hObject, eventdata, handles) global g_handleptr; h = animatedline; %创建空白动态曲线 axis([-500 2000 -500 1000]) %设置坐标系范围 Response =char(512*512); cmd=char('?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)'); char Response; cmdpath=char('C:UsersLemonMATLABProjectsLocalRunSPBasic1.bas'); [~,~,~]=calllib('zauxdll','ZAux_BasDown',g_handleptr, cmdpath,1); for k = 1:10000 [~,~,~,Response]=calllib('zauxdll','ZAux_DirectCommand',g_handleptr, cmd, Response,255); Para = strsplit(Response,' '); x=str2double(Para(1)); y=str2double(Para(2)); set(handles.edit_dpos0,'String',Para(1)); set(handles.edit_dpos1,'String',Para(2)); set(handles.edit_dpos2,'String',Para(3)); set(handles.edit_dpos3,'String',Para(4)); set(handles.edit_axisstatus0,'String',Para(5)); set(handles.edit_axisstatus1,'String',Para(6)); set(handles.edit_axisstatus2,'String',Para(7)); set(handles.edit_axisstatus3,'String',Para(8)); set(handles.edit_in0,'String',Para(9)); set(handles.edit_in1,'String',Para(10)); set(handles.edit_in2,'String',Para(11)); set(handles.edit_in3,'String',Para(12)); addpoints(h,x,y); drawnow end
(3)运行效果
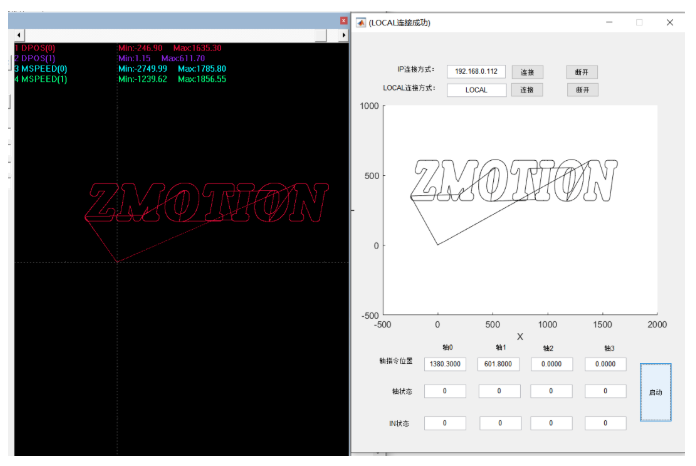
(4)分析与结论
MotionRT7的出现,无疑是一次重大的惊喜与升级,它在为我们进行大批量指令交互的过程中,提供了更好的效率与稳定性,给生产创造更高的效率与更多的价值!
相关的函数请参照“ZMotion PC函数库编程手册”。
本次,正运动技术Windows实时运动控制软核(六):LOCAL高速接口测试之Matlab,就分享到这里。更多精彩内容请关注“正运动小助手”公众号。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
Windows实时运动控制软核MotionRT7 | Qt例程讲解视频演示# 正运动技术# 运动控制正运动技术 2024-01-10
-
Windows实时运动控制软核:LOCAL高速接口测试之Labview# 正运动技术# 运动控制器# 运动控制正运动技术 2024-04-16
-
正运动自主研发实时软核MotionRT7与Labview单轴点动例程开发2023-05-12 0
-
Windows实时运动控制软核(一):LOCAL高速接口测试之C#2022-12-03 1881
-
Windows实时运动控制软核(二):LOCAL高速接口测试之Qt2022-12-12 699
-
MotionRT7实时运动控制使用:LOCAL高速接口测试之C#2022-12-14 532
-
Windows实时运动控制软核(三):LOCAL高速接口测试之C++2022-12-20 1007
-
MotionRT7的安装和使用:LOCAL高速接口测试2022-12-21 731
-
Windows实时运动控制软核(四):LOCAL高速接口测试之VB.NET2023-01-05 654
-
Windows实时运动控制软核(五):LOCAL高速接口测试之VC6.02023-01-12 661
-
Windows实时运动控制软核(六):LOCAL高速接口测试之Matlab2023-02-06 2485
-
Windows实时运动控制软核(七):LOCAL高速接口测试之Labview2023-03-16 1362
-
PCIE超高速实时运动控制卡在六面外观视觉检测上的应用2023-08-22 896
-
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发2024-01-15 542
全部0条评论

快来发表一下你的评论吧 !
