

DSP和电机控制芯片简化了基于DSP的交流电机控制硬件
描述
变速电机控制系统具有广泛的应用,从高端工业机器人到普通家用电器,如家用洗衣机。这些系统中的控制环路首先使用模拟组件实现。通常,运算放大器用于反馈补偿电路,比较器用于产生开关电源转换器的控制信号。然而,低成本微型计算机的出现越来越多地导致通过数字手段实现控制和用户界面功能。处理能力成本的不断降低使得通过在同一处理器上实现所有电机控制功能来进一步简化系统硬件成为可能。
过去十年来,ADI运动控制事业部一直是交流伺服电机市场旋转变压器到数字转换产品的领先供应商。AD2S80和AD2S90 R/D转换器等器件用于处理模拟反馈信号,以实现永磁交流伺服驱动系统中的位置和速度的数字控制。运动控制事业部的最新产品ADMC200和ADMC201运动协处理器进一步推动了这一概念。这些多功能器件在单个芯片上结合了为交流电机控制提供反馈控制电流所需的所有接口和信号处理功能。
ADMC201提供用于捕获电机电流或电压信号的模拟采集系统、调节这些信号的矢量处理功能以及控制功率转换器所需的脉宽调制器。ADMC201与ADSP-2105数字信号处理器相结合,可用作交流电机驱动系统的高性能控制引擎。以下示例描述了主要器件功能及其在电机控制应用中的使用。
交流伺服电机控制系统:伺服电机控制系统通常有两个级联控制回路,如图1所示。外部运动回路根据来自位置或速度传感器的反馈信号控制电机位置和速度。该回路的输出是对电机扭矩增加或减少的需求,该扭矩被馈送到内部电流回路。电流环路为功率转换器生成信号,功率转换器提供合适的电机电流以产生所需的输出扭矩。从直流电源轨到电机的功率流通过快速改变功率半导体开关(如IGBT或功率MOSFET)的导通和关通周期来控制。这些控制信号通常是固定频率、可变占空比波形,可以使用定时电路以数字方式产生。
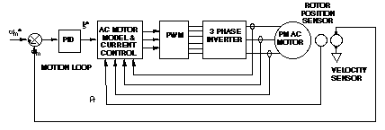
图1
通常,运动回路设计与电机类型(交流或直流)无关,而仅与系统的机械性能(如惯性、动态摩擦等)有关。然而,电流环路的复杂程度因电机类型而异。在直流电机中,转矩与电枢绕组中的直流电流成正比。但为了控制交流电机中的转矩,电流必须与旋转转子场的位置同步。简化电机转矩控制的一种方法是将测量的定子电流转换为与转子磁场同步的参考系。此过程(图2)产生两个等效的直流电机电流量:产生扭矩的组件Iq和一个字段控制组件 Id.交流电机控制系统计算两个正交电压,Vd和 Vq,需要强制 Iq电流直接跟随转矩需求和Id电流以保持恒定的转子磁场。然后使用逆变换来变换“直流电机”Vd和 Vq电压返回到定子参考系,以给出所需的绕组电压。
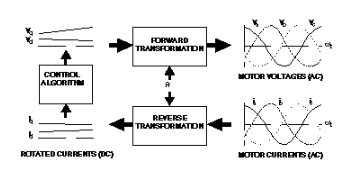
图2
图3显示了永磁交流伺服电机控制方案的全数字实现。旋转变压器数字 (R/D) 转换器从轴安装旋转变压器的输出信号中获取数字角位置反馈信息。外部位置和速度环计算所需的电机转矩电流,Iq.电机速度是使用估计算法从位置测量值计算的。场约简组件,Id,通常为零,以便最大化电机扭矩输出。但是,弱场函数可以设置非零Id有效降低转子磁场强度,从而增加电机转速范围。
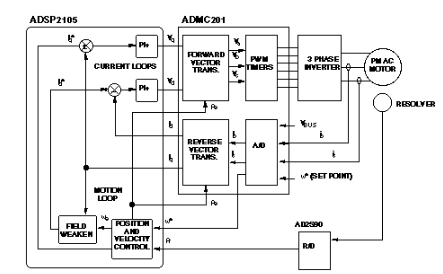
图3
A/D 转换器调节电机的定子电流测量值,这些测量值作为矢量变换的输入传递。反向变换取两个定子电流信号和转子电角ρ-并计算扭矩和磁场分量Iq和我d.推断第三个定子电流信号,因为所有三个定子电流的总和为零。有两个电流环路,一个扭矩环路和一个励磁环路,具有比例和积分补偿(PI)。这些环路的响应可以通过前馈估计的绕组反电动势和绕组阻抗降来改善(因此称为“+”注释)。五世d和 Vq然后将计算的输出在矢量变换模块中转换为三相定子电压的数字等效值V一个/ 5b和 Vc,用于驱动电机。
PWM定时器模块将数字输入转换为三相逆变器的脉宽调制定时信号。施加到电机绕组的电压由每个逆变器支路中功率晶体管开关的导通时间控制。在下面的示例(图4)中,当上部逆变器功率晶体管Q一个,导通,绕组“a”连接到+V母线电源轨,导致绕组电流,i一个,以增加。当 Q一个通过下部逆变器二极管D关闭绕组电流“自由轮”美联社,并将绕组“A”连接到 -V 总线电源轨。定子绕组平均电压,V一个,与导通周期成正比,t一个, 功率晶体管, Q一个,由下式给出:
对于负定子电流,绕组电流流过较低的晶体管Q美联社和通过上二极管D的“自由轮”一个.在这种情况下,绕组电压是二极管D导通周期的函数一个.为了使施加的定子电压独立于定子电流检测,功率晶体管Q美联社,在 Q一个已关闭。然而,为了防止这些功率晶体管同时导通的可能性,在上部和下部器件的导通信号之间插入了短暂的“死区时间”。由此产生的低电平有效PWM信号(如图4 (c)所示)是互补的定时波形式,有源部分之间的“死”时间很短。
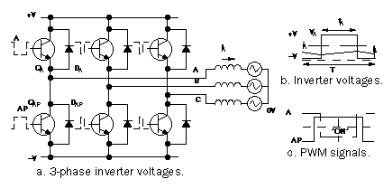
图4
上述交流伺服系统可以使用三个主要控制组件构建。ADSP-2105 DSP实现控制环路,ADMC201与三相逆变器接口,AD2S90与旋变器位置传感器接口。ADSP-2105定点DSP针对高速信号处理应用进行了优化。它非常适合交流电机电流控制,因为控制环路周期时间短,只有50-100μs。AD2S90旋变数字转换器可以使用串行端口简单地连接到DSP。[如果使用ADSP-2115,它将提供额外的串行端口。配套振荡器IC AD2S99用于旋变器激励,并提供信号丢失检测。
ADMC201在DSP控制器和三相逆变器之间提供所需的接口功能;它适用于控制永磁交流电机和交流感应电机。ADMC201及其接口的详细说明如下。
ADMC200运动协处理器系列:ADMC200运动协处理器具有三个主要功能模块:4通道、11位同步采样模数转换系统、12位零中心PWM定时器模块和矢量旋转模块。此外,ADMC201还提供三个额外的模拟输入通道和6位可编程数字I/O引脚。该器件具有 25 个内部存储器映射寄存器,用于存储外设输入和输出数据。嵌入式控制序列器解码片选线、读写线以及4条地址线,并将这些数据寄存器直接映射到DSP存储器地址空间。这意味着DSP始终可以直接访问所有寄存器。片内中断控制器可以在模数转换序列结束时或矢量变换完成时中断DSP。A/D转换器的转换开始线可由PWM定时器模块驱动,以将控制软件和信号采样同步至PWM频率。
ADMC200采用CMOS工艺设计,兼具低成本和低功耗。A/D转换器基于CMOS兼容型开关电容技术,是一款11位逐次逼近器件,前端为4通道同步采样采样保持放大器。这允许在不到14.4μs的时间内采集多达四个电机电流或电压信号而不会“偏斜”。ADMC201内置4:1多路复用器,可为温度或直流总线电压等较慢信号提供额外的三个异步通道。转换后的值采用二进制补码格式,以匹配定点 DSP 处理器。模拟输入范围为 0 至 5V,2.5V 相当于数字零点。板载基准的绝对精度在 5% 以内(满载)。模数转换器的整体精度为8LSB,而通道间匹配在±2LSB以内。高转换启动脉冲采集所有四个输入通道,并根据控制寄存器设置启动 2、3 或 4 个通道的转换序列。转换结束可以编程为为DSP生成中断脉冲,DSP可以按任何顺序读取结果寄存器。
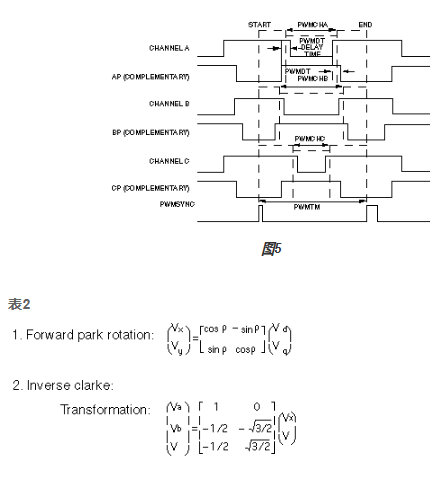
12 位 PWM 模块为功率转换器开关产生三对恒定频率可变占空比波形,频率范围为 1.5kHz 至 25kHz。图5中描述的信号是基于中心的低电平有效信号,因此导通(低电平)周期与定时脉冲之间的中点对称。这使得电流采样与PWM波形同步变得更加容易。波形是互补的,即功率器件成对切换:一个器件“开”,互补器件“关”。为了防止逆变器功率器件中同时导通的可能性,互补PWM波形是死区时间调整(PWMDT)。在每个PWM周期开始时产生的高电平有效PWMSYNC脉冲使电源逆变器的运行与A/D转换器同步。
12 位硬件矢量旋转模块可以在定子(交流电流和电压)和转子(直流电机等效)参考帧之间执行正向和反向 Park- 和 Clarke 变换。反向变换转换三相定子电流信号,I一个我b和我c,到两个正交转子参考电流,Id和我q.变换由三个阶段组成(表1),其中ρ是转子场的角度。
表1
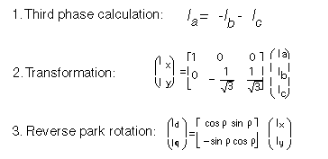
正向变换转换两个正交转子参考电压 Vd和 Vq,到三相定子电压信号,I一个我b和我c.变换由两个阶段组成(表2),其中ρ是转子场的角度。
ADMC201数字I/O模块有六条数字线,可配置为输入或输出。它们还可以配置为系统保护功能的中断源。I/O 模块通过四个内存映射寄存器访问。
交流伺服电机控制软件:使用ADSP-2105控制交流伺服电机所需的软件可能需要不到500行DSP代码。由于篇幅所限,这里无法对软件进行全面描述,但我们将介绍一些核心算法和代码。
电流控制算法通过中断信号与PWM频率同步。通过在PWM周期开始时将ADMC201的PWMSYNC引脚(来自定时器模块)连接到ADC的CONVST引脚,对电机电流进行采样。ADMC201的中断(IRQ)信号连接到ADSP-2105的IRQ2引脚,在模数转换周期结束时中断DSP。捕获的电流信号表示平均绕组电流值,因为采样位于电流波形的中点。在每个PWM周期开始后,向DSP提供一组电流测量值;并在下一个周期之前计算一组新的定子电压值和PWM时间。
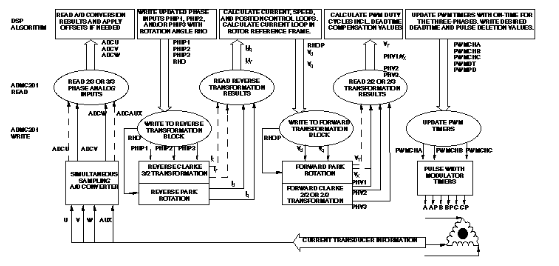
图6中的电流环路信号流程图描述了ADSP-2105 DSP和ADMC201协处理器之间的信息流。当ADMC201的模数转换器中断指示有一组新的电流采样可用时,该算法开始。DSP从ADMC201的V和W寄存器读取两个相电流值,根据A/D和电流传感器偏移进行调整,并将其与转子角度ρ一起写入ADMC201 PHIP2和PHIP3矢量变换模块。ADMC201启动反向矢量旋转,而DSP可以执行保护功能,例如过载检测或总线电压监控。转换的结束由中断发出信号;然后DSP读取ID和IQ寄存器并实现电流环路控制算法。计算出的VD和VQ值与转子角度ρ一起写入ADMC201的VD和VQ寄存器。ADMC201开始正向矢量旋转,而DSP可以执行一些进一步的内务保持功能。转换的结束由另一个中断发出信号;DSP 读取 PHV1、PHV2 和 PHV3 寄存器,并根据 PWM 周期和总线电压调整这些值。然后,DSP将三个新值写入PWM寄存器:PWMCHA、PWMCHB和PWMCHC,以闭合电流控制环路。
控制算法由许多控制定律和一些对ADMC201数据寄存器的读写组成。ADI定点DSP特别适合实现控制律,如P-I(比例+积分控制)环路和状态空间算法,这方面的例子很多。ADMC201的存储器映射结构具有访问数据寄存器不需要特殊读取或写入序列的优点。ADMC201读写寄存器通过器件上的片选线映射到DSP外部DM地址空间中的一个块。下表显示了ADMC201 A/D转换器中断的中断服务例程代码示例,以说明这一点。第一条指令是使用数据存储器读取指令读取ADMC201系统状态寄存器。然后,AR寄存器加载一个常数,该常数设置了ADMC201 A/D中断位。如果未设置 A/D 中断,则继续检查其他中断源,例如 PARK 块中断。如果设置了位,则读取A/D寄存器并启动电流环路算法。
|
IRQ2_ISR AY0 = DM(ADMC201_SYSSTAT_); |
读取ADMC201统计寄存器 |
|
:AR = ADMC201_AD_INT; |
ADMC201 模数中断位 |
|
AR = AR 和 AY0; |
测试:是否设置了此位? |
|
如果 NE 跳PARK_INTERRUPT; |
如果未设置,则跳转到下一个中断 |
|
AX0 = DM(ADMC201_ADCV_); |
读取 A/D 通道 V 寄存器 |
|
DM(I_PH_V) = AX0; |
在数据存储器中保存值 |
|
AX0 = DM(ADMC201_ADCW_); |
读取 A/D 通道 W 寄存器 |
|
DM(I_PH_W) = AX0; |
在数据存储器中保存值 |
结论:
我们选择了一个使用ADSP-2105(或ADSP-2115)、ADMC201和AD2S90芯片组实现的永磁交流伺服电机控制方案示例。这些硬件选择为系统配置提供了很大的灵活性。如果需要更大的处理“马力”,ADSP-2115可以升级到ADSP-2101或ADSP-2181。如果不需要额外的模拟通道和数字I/O,则可以使用成本较低的ADMC200。ADSP-2105和ADMC201还可用于控制交流感应电机,编码器代替旋转变压器。
提供使用ADSP-2101 EZLAB和ADMC201板的评估系统。它附带软件,说明了ADMC201功能块的主要特性。该系统可用于构建三相电机控制演示系统的控制元件。
审核编辑:郭婷
-
如何简化基于DSP的可简化交流电机控制硬件2014-11-17 2743
-
交流电机调速控制系统怎样结合 DSP 和 FOC 控制算法2019-12-25 3587
-
经典交流电机控制资料,FOC、数字系统全都讲明白了2020-08-04 8442
-
基于DSP交流电机模糊PID控制系统的设计2016-04-05 947
-
DSP在现代电力电子与交流电机控制系统中的应用2016-04-13 1134
-
复杂可编程逻辑器件_CPLD_在DSP交流电机控制系统中的应用2016-04-15 696
-
基于DSP的交流电机双闭环控制系统设计2016-04-18 740
-
一种基于DSP的交流电机矢量控制系统2016-03-30 662
-
交流电机直接转矩控制2017-01-21 987
-
基于DSP在现代电力电子与交流电机控制系统中的应用2017-10-20 1309
-
交流电机矢量控制2021-05-19 1420
-
基于DSP和FOC控制算法的交流电机调速控制系统2021-09-17 1556
-
基于DSP-CPLD的交流电机调速在水处理控制中的应用2021-09-22 984
-
什么是交流电机控制?2023-03-26 1475
-
使用TMS320C25 DSP实现交流电机的磁场定向控制2024-10-28 529
全部0条评论

快来发表一下你的评论吧 !
