

基于工控板EMB8628I的无人运载小车控制系统
电子说
描述
无人运载小车有效实现了生产过程中的自动化流程,降低了生产成本,提高了企业的竞争力,在企业的生产过程中发挥了重要的作用。
无线遥控手柄发出控制运转遥控指令,无线接收器将遥控指令发送给工控板,工控板根据遥控指令控制4路伺服(或步进电机)进行运转,同时将运转结果实时传回控制手柄。
我们选用的产品
工控板EMB8628I+外置无线通信模块+4个电机驱动器
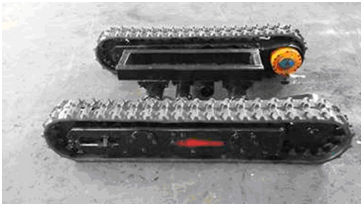
履带小车系统可分为行走模块、C型臂探测器模块、喷雾模块、激光探测模块及无线图像数据模块。

1、移动方式:采用履带式移动方式,因整机前端负载大,车体采用前驱;考虑到实际工作中转向,左、右副履带采用差速、方向模式来实现转向;
2、移动速度:移动速度>0.8m/s,定位精度<0.05m;
3、通讯方式:具备有线、无线、红外、程控的通讯控制方式;
4、无线图传模块:无线图像传输即视频及图像数据,通过无线技术从采集端到接收端进行实时传输。本系统中无线图像传输技术主要包括两个方面,一是小车在行进过程中的移动图像视频的实时传输,另外对C型臂采集到的图片数据进行实时传输。
5、电源:DC24V输入
6、4路隔离PWM脉冲输出, 控制4路电机驱动器
7、4路隔离方向控制DO输出,控制4路电机方向
8、4路隔离使能控制DO输出,控制4路电机使能
9、4组限位控制输入:每组包括左限位DI输入、右限位DI输入、原点DI输入
10、一路隔离485总线,外接外部无线模块,接收遥控指令
11、2路正交编码器输入,反馈左右电机的运动轨迹
12、4路急停DI信号,以实现迅速停止电机运转
13、4路继电器输出(DC24V,驱动电磁阀)
14、工控板应满足工作现场电机的强电磁干扰要求,不死机。
15、温度要求:-20C°~70C°
审核编辑 黄宇
-
华北工控发布高性能EPIC单板EMB-41482025-01-21 1115
-
MQTT代理助力AGV小车与控制系统之间实现通信2023-02-07 2039
-
详解AGV小车和控制系统之间的通信过程2022-05-13 9598
-
虹科案例 | HiveMQ助力AGV小车与控制系统之间实现通信2022-05-12 1710
-
基于单片机蓝牙控制的智能避障小车控制系统2021-11-12 952
-
无人机控制系统原理是什么?2021-11-08 2774
-
怎样去设计一种基于STM32的灭火小车控制系统2021-09-27 3287
-
STM32灭火小车控制系统(来自LLC团队)精选资料分享2021-08-03 1712
-
工控软件结构特点及其对控制系统的影响2019-11-07 1369
-
【Tisan物联网申请】基于物联网小车控制系统2015-10-15 2140
-
智能巡线小车的多模式速度控制系统2012-09-08 3179
-
自行小车的PLC控制系统分析2012-04-27 2684
-
现场总线技术在热工控制系统中的应用2009-10-13 1996
全部0条评论

快来发表一下你的评论吧 !
