

应用工程师提问:运算放大器驱动容性负载
模拟技术
描述
Q. 为什么要驱动容性负载?
A.这通常不是一个选择的问题。在大多数情况下,负载电容不是来自您有意添加的电容器;大多数情况下,它是一种不需要的寄生,例如一段同轴电缆的电容。然而,确实会出现需要在运算放大器输出端去耦直流电压的情况,例如,当运算放大器用于反相基准电压并驱动动态负载时。在这种情况下,您可能希望将旁路电容直接放置在运算放大器的输出端。无论哪种方式,容性负载都会影响运算放大器的性能。
Q. 容性负载如何影响运算放大器性能?
A.简而言之,它可以将您的放大器变成振荡器。方法如下:
运算放大器具有固有的输出电阻Ro,与容性负载一起,在放大器的传递函数中形成一个额外的极点。如波特图所示,在每个极点,振幅斜率变得更加负20 dB/十倍频程。注意每个极点如何增加多达-90°的相移。我们可以从两个角度中的任何一个来看待不稳定。观察对数图上的幅度响应,当开环增益和反馈衰减之和大于单位时,会出现电路不稳定。同样,从相位响应来看,如果环路相移低于闭环带宽,运算放大器将倾向于以环路相移超过-180°的频率振荡。电压反馈型运算放大器电路的闭环带宽等于运算放大器的带宽积(GBP,或单位增益频率)除以电路的闭环增益(ACL).
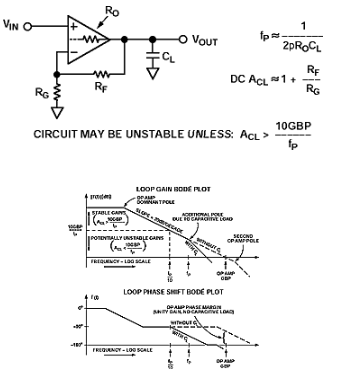
运算放大器电路的相位裕量可以被认为是使电路不稳定所需的闭环带宽下的额外相移量(即,相移+相位裕量= -180°)。当相位裕量接近零时,环路相移接近-180°,运算放大器电路接近不稳定。通常,远小于45°的相位裕量值会导致频率响应中的“峰值”以及阶跃响应中的过冲或“振铃”等问题。为了保持保守的相位裕量,容性负载产生的极点应至少比电路的闭环带宽高出十倍频程。如果不是,请考虑不稳定的可能性。
Q. 那么如何处理容性负载呢?
A.首先,应确定运算放大器是否可以安全地自行驱动负载。许多运算放大器数据手册都规定了“容性负载驱动能力”。其他则提供了“小信号过冲与容性负载”的典型数据。在查看这些数字时,您会发现过冲随着负载电容的增加呈指数级增长。当接近100%时,运算放大器接近不稳定。如果可能,请使其远离此限制。另请注意,此图用于指定的增益。对于电压反馈型运算放大器,容性负载驱动能力随增益成比例增加。因此,能够以单位增益安全驱动100 pF电容的aVF运算放大器应该能够以1000的增益驱动10 pF电容。
一些运算放大器数据手册规定了开环输出电阻(Ro),从中可以计算增益的频率 - 如上所述的添加极点。如果增加极点的频率(fP) 比电路的带宽高出十余年。
如果运算放大器的数据手册没有指定容性负载驱动或开环输出电阻,也没有过冲与容性负载的关系图,那么为了确保稳定性,您必须假设任何负载电容都需要某种补偿技术。有许多方法可以稳定标准运算放大器电路以驱动容性负载。以下是一些:
噪声增益控制:在低频应用中保持稳定性的一种有效方法(通常被设计人员忽视)是在不改变信号增益的情况下增加电路的闭环增益(也称为“噪声增益”),从而降低开环增益和反馈衰减乘积趋于一的频率。下面显示了通过在运算放大器输入之间连接RD来实现此目的的一些电路。这些电路的“噪声增益”可以通过给定的公式得出。
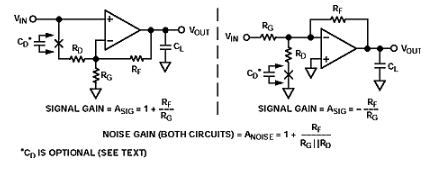
由于稳定性由噪声增益而不是信号增益控制,因此上述电路可以在不影响信号增益的情况下提高稳定性。只需保持“噪声带宽”(GBP/A噪声) 至少低于负载产生的极点十倍,以保证稳定性。
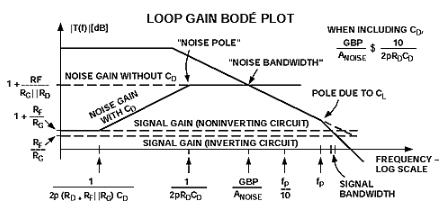
这种稳定方法的一个缺点是,由于折合到输入端的电压噪声和输入失调电压的放大增加,会产生额外的输出噪声和失调电压。增加的直流失调可以通过包括C来消除D与 R 串联D,但增加的噪音是这种技术固有的。这些电路的有效噪声增益(带和不带C)D如图所示。
CD,使用时,应尽可能大;其最小值应为 10 A噪声/(2 pRDGBP),以保持“噪声极”至少低于“噪声带宽”十年。
环外补偿:稳定运算放大器以实现容性负载驱动的另一种方法是在运算放大器的输出端子和负载电容之间增加一个电阻RX,如下所示。虽然显然在反馈环路之外,但它与负载电容一起将零点引入反馈网络的传递函数中,从而减少高频下的环路相移。
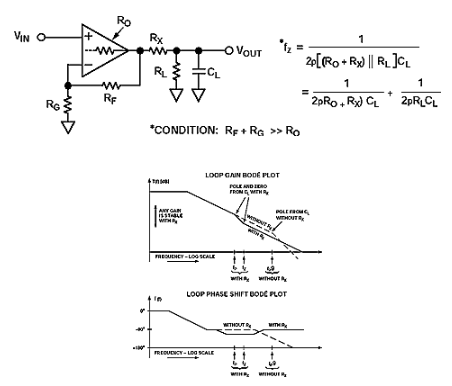
为保证稳定性,R的值X应使添加的零(fZ)至少比运算放大器电路的闭环带宽低十倍频程。随着R的加入X,电路性能不会受到第一种方法增加的输出噪声的影响,但负载看到的输出阻抗会增加。这会降低信号增益,因为电阻分压器由R形成X和 RL.如果 RL已知且合理恒定,增益损耗的结果可以通过增加运算放大器电路的增益来抵消。
这种方法在驱动输电线路方面非常有效。R 的值L和 RX必须等于电缆的特性阻抗(通常为 50 欧姆或 75 欧姆),以避免驻波。所以 RX是预先确定的,剩下的就是将放大器的增益加倍,以抵消电阻分压器的信号损耗。问题解决了。
环内补偿:如果 RL未知或动态,增益级的有效输出电阻必须保持较低水平。在这种情况下,连接 R 可能会很有用X在整个反馈循环中,如下所示。在这种配置下,直流和低频反馈来自负载本身,允许从输入到负载的信号增益不受分压器R的影响X和 RL.
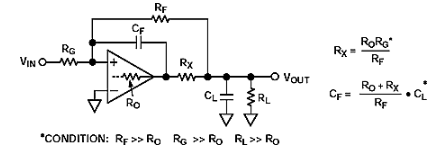
增加的电容器,CF,在该电路中允许消除 C 贡献的极点和零点L.简单地说,C的零F与 C 的极点重合L和 C 的极点F与 C 的零L.因此,整体传递函数和相位响应就像根本没有电容一样。为了确保消除两个极点/零点组合,必须准确求解上述方程。还要注意条件;如果负载电阻相对较大,则很容易满足它们。
当 RO不得而知。在这种情况下,设计过程变成了猜谜游戏和原型设计的噩梦。关于 SPICE 的注意事项:运算放大器的 SPICE 模型不能准确模拟开环输出电阻 (RO);因此,它们不能完全取代补偿网络的实证设计。
同样重要的是要注意 CL必须具有已知(和常量)值才能应用此技术。在许多应用中,放大器驱动“开箱即用”的负载,而L从一个负载到下一个负载可能会有很大差异。最好只在C时使用上述电路L是封闭系统的一部分。
其中一种应用涉及基准电压的缓冲或反相,以驱动一个大的去耦电容。在这里,CL是一个固定值,允许准确消除极点/零点组合。这种方法的低直流输出阻抗和低噪声(与前两种方法相比)可能非常有益。此外,可能去耦基准电压(通常是许多微法拉)的大容量电容无法通过任何其他方法进行补偿。
上述三种补偿技术各有利弊。您现在应该知道足够的知识来决定哪种最适合您的应用程序。这三款产品均适用于“标准”、单位增益稳定、电压反馈型运算放大器。请继续阅读,了解使用专用放大器的一些技术。
Q. 我的运算放大器有一个“补偿”引脚。我能否对运算放大器进行过度补偿,使其在驱动容性负载时保持稳定?
答:是的。这是补偿负载电容的最简单方法。目前,大多数运算放大器都针对单位增益稳定性进行了内部补偿,因此不提供“过补偿”选项。但许多器件只有在非常高的噪声增益下才具有固有的稳定性。这些运算放大器有一个引脚,外部电容可以连接到该引脚,以降低主极点的频率。为了在较低增益下稳定工作,必须将增加的电容连接到该引脚,以降低增益带宽积。当必须驱动容性负载时,进一步增加(过度补偿)可以提高稳定性,但以牺牲带宽为代价。
问:到目前为止,您只讨论了电压反馈运算放大器,对吗?电流反馈(CF)运算放大器在容性负载下的行为是否类似?我可以使用此处讨论的任何补偿技术吗?
一个。电流反馈架构的某些特性在驱动容性负载时需要特别注意,但对电路的总体影响是相同的。增加的极点与运算放大器输出电阻相结合,会增加相移并降低相位裕量,从而可能导致峰值、振铃甚至振荡。然而,由于不能说CF运算放大器具有“增益带宽乘积”(带宽对增益的依赖性要小得多),因此不能仅仅通过增加噪声增益来大幅提高稳定性。这使得第一种方法不切实际。此外,电容器(CF) 不应置于 CF 运算放大器的反馈环路中,从而使第三种方法无效。补偿电流反馈型运算放大器以驱动容性负载的最直接方法是在放大器输出端增加一个“环外”串联电阻,如方法2所示。
| Part Number | Ch |
BW MHz |
SR V/ms |
vn nV/ Hz |
in fA/ Hz |
VOS mV |
Ib nA |
Supply Voltage Range [V] |
IQ mA |
RO ohms |
Cap Load Drive [pF] |
Notes |
| AD817 | 1 | 50 |
350 |
15 | 1500 | 0.5 | 3000 | 5-36 | 7 | 8 | unlim | |
| AD826 | 2 |
50 |
350 |
15 | 1500 | 0.5 |
3000 |
5-36 | 6.8 | 8 | unlim | |
| AD827 | 2 |
50 |
300 | 15 | 1500 | 0.5 |
3000 |
9-36 | 5.25 | 15 | unlim | |
| AD847 | 1 |
50 |
300 |
15 | 1500 | 0.5 |
3000 |
9-36 | 4.8 | 15 | unlim | |
| AD848 | 1 | 35 | 200 | 5 | 1500 | 0.5 |
3000 |
9-36 | 5.1 | 15 | unlim | GMIN=5 |
| AD849 | 1 | 29 | 200 | 3 | 1500 | 0.3 |
3000 |
9-36 | 5.1 | 15 | unlim | GMIN=25 |
| AD704 | 4 | 0.8 | 0.15 | 15 | 50 | 0.03 | 0.1 | 4-36 | 0.375 | 10000 | ||
| AD705 | 1 | 0.8 | 0.15 | 15 |
50 |
0.03 | 0.06 | 4-36 | 0.38 | 10000 | ||
| AD706 | 2 | 0.8 | 0.15 | 15 |
50 |
0.03 | 0.05 | 4-36 | 0.375 | 10000 | ||
| OP97 | 1 | 0.9 | 0.2 | 14 | 20 | 0.03 | 0.03 |
4-40 |
0.38 | 10000 | ||
| OP279 | 2 | 5 | 3 | 22 | 1000 | 4 | 300 |
4.5-12 |
2 | 22 | 10000 | |
| OP400 | 4 | 0.5 | 0.15 | 11 | 600 | 0.08 | 0.75 |
6-40 |
0.6 | 10000 | ||
| AD549 | 1 | 1 | 3 | 35 | 0.22 | 0.5 | 0.00015 | 10-36 | 0.6 | 4000 | ||
| OP200 | 2 | 0.5 | 0.15 | 11 | 400 | 0.08 | 0.1 |
6-40 |
0.57 | 2000 | ||
| OP467 | 4 | 28 | 170 | 6 | 8000 | 0.2 | 150 | 9-36 | 2 | 1600 | ||
| AD744 | 1 | 13 | 75 | 16 | 10 | 0.3 | 0.03 | 9-36 | 3.5 | 1000 | comp.term | |
| AD8013 | 3 | 140 | 1000 | 3.5 | 12000 | 2 | 3000 | 4.5-13 | 3.4 | 1000 | current fb | |
| AD8532 | 2 | 3 | 5 | 30 | 50 | 25 | 0.005 | 3.6 | 1.4 | 1000 | ||
| AD8534 | 4 | 3 | 5 | 30 | 50 | 25 | 0.005 | 3.6 | 1.4 | 1000 | ||
| OP27 | 1 | 8 | 2.8 |
3.2 |
1700 | 0.03 | 15 | 8-44 |
6.7 |
70 |
1000 |
|
| OP37 | 1 | 12 | 17 |
3.2 |
1700 | 0.03 | 15 | 8-44 | 6.7 | 70 |
1000 |
GMIN=5 |
| OP270 | 2 | 5 | 2.4 |
3.2 |
1100 | 0.05 | 15 | 9-36 | 2 |
1000 |
||
| OP470 | 4 | 6 | 2 | 3.2 | 1700 | 0.4 | 25 | 9-36 | 2.25 |
1000 |
||
| OP275 | 2 | 9 | 22 | 6 | 1500 | 1 | 100 | 9-44 | 2 |
1000 |
||
| OP184 | 1 | 4.25 | 4 |
3.9 |
400 | 0.18 | 80 | 4-36 | 2 |
1000 |
||
| OP284 | 2 | 4.25 | 4 |
3.9 |
400 |
0.18 | 80 | 4-36 | 2 |
1000 |
||
| OP484 | 4 | 4.25 | 4 | 3.9 |
400 |
0.25 | 80 | 4-36 | 2 |
1000 |
||
| OP193 | 1 | 0.04 | 15 | 65 | 50 | 0.15 | 20 | 3-36 | 0.03 |
1000 |
||
| OP293 | 2 | 0.04 | 15 | 65 | 50 | 0.25 | 20 | 3-36 | 0.03 |
1000 |
问:这很有信息量,但我宁愿不处理这些方程中的任何一个。此外,我的电路板已经布置好了,我不想放弃这个生产运行。是否有任何运算放大器在驱动容性负载时具有固有的稳定性?
答:是的。ADI公司生产的几款运算放大器可驱动“无限”负载电容,同时保持出色的相位裕量。表中列出了它们,以及其他一些可将容性负载驱动至指定值的运算放大器。关于“无限制”电容负载驱动器件:不要期望在驱动10 μF时获得与驱动纯阻性负载时相同的压摆率。
审核编辑:郭婷
-
请问运算放大器如何驱动电容负载?2024-09-12 534
-
什么是运算放大器2022-11-08 2054
-
容性负载如何影响运算放大器的性能2022-08-17 2015
-
【转】模拟工程师电路设计指导手册:运算放大器2022-02-03 5356
-
AN-360:询问应用工程师-6:运算放大器问题2021-04-27 863
-
请问保持运算放大器容性负载稳定性的方法有哪些?2021-04-13 1932
-
16本运算放大器经典书籍下载分享384M2021-04-12 7954
-
放大器驱动容性负载对稳定性的影响2021-02-13 3218
-
模拟工程师电路设计指导手册:运算放大器2020-11-17 6791
-
怎么离线运算放大器目录?2019-08-09 1516
-
仪表放大器应用工程师指南2017-04-12 2698
-
运算放大器容性负载驱动问题2010-01-04 4360
全部0条评论

快来发表一下你的评论吧 !
