

Tokio中hang死所有worker的方法
电子说
描述
Tokio[1] 的 task (一个 Future ) 里如果使用了阻塞调用,例如 std::Mutex,会阻塞当前的 tokio-worker 线程,这个 worker 无法再执行其他 task。所以代码里如果不可避免的有(少量的)阻塞调用,就要为 runtime 启动更多的 worker 线程,保证存在没被阻塞的 worker 来执行待调度的 task,以避免整个 tokio runtime 完全 hang 住(有 task 但没 worker 运行它)。
但现实是,就算 worker 再多,tokio 也可能造成永久性的阻塞。
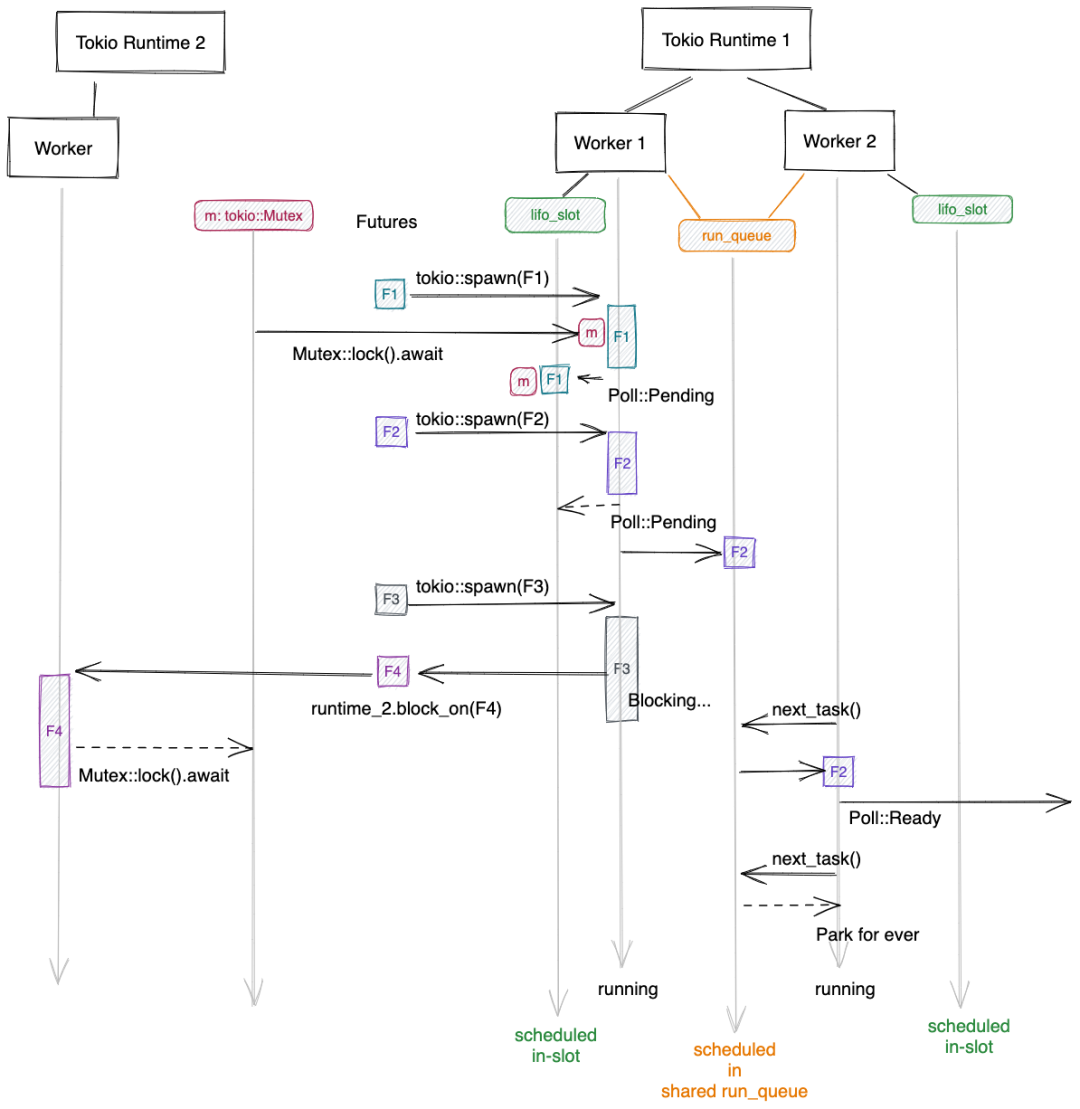
原因是 tokio 里的待执行 task 不是简单的放到一个 queue 里,除了 runtime 内共享的,可被每个 worker 消费的run_queue[2],每个 worker 还有一个自己的 lifo_slot[3],只存储一个最后被放入的 task (目的是减小调度延迟)。lifo_slot 只由它所属的 worker 使用,里面存储的 task 不能被其他 worker 执行。由于这个结构,构造 hang 住的方法是如图所示:
-
• Future f1 被 runtime-1 执行, 持有一个 async 的锁
m后,返回了Pending,这时它被调度到 worker-1 本地的lifo_slot。 -
• Future f2 在 runtime-1 执行后返回
Pending,被放入共享队列run_queue。 -
• Future f3 在 runtime-1 中执行, 它将一个任务
f4交给其他的 runtime 去完成(例如为了隔离网络IO和本地磁盘IO),使用block_on(f4)[4] 的方式,等待执行结果返回。 -
• f4 中也需要锁
m,等待。
这时,f2 在共享队列 run_queue 中,可以被执行,但是 f1 在 worker-1 本地的 lifo_slot 里,只能由 worker-1 调度,但 worker-1 当前阻塞在 f3。于是等待关系形成了一个环: f4 → m(f1) → f3 → f4,hang 死任务达成。
审核编辑 :李倩
-
Nginx中Master与Worker进程的工作机制2026-04-08 333
-
TaskPool和Worker的对比分析2025-06-18 859
-
HarmonyOS NEXT 原生应用/元服务-ArkTS代码调试worker/taskpool调试2025-03-13 408
-
深度解析:PCB死铜问题的根源与处理方法2024-11-28 1900
-
鸿蒙语言基础类库:ohos.worker 启动一个Worker2024-07-11 1417
-
鸿蒙原生应用开发-ArkTS语言基础类库多线程TaskPool和Worker的对比(三)2024-03-27 322
-
Channel模块的使用方法示例2023-09-20 2554
-
Tokio 模块的优雅停机机制2023-09-19 1647
-
WasmEdge增加了Tokio支持2022-12-05 1620
-
normal worker_pool详细的创建过程代码分析2018-04-08 8206
全部0条评论

快来发表一下你的评论吧 !
