

相控阵天线方向图:光栅瓣和波束斜视
描述
作者:Peter Delos, Bob Broughton, and Jon Kraft
这是我们关于相控阵天线方向图的三部分系列文章的第二篇。在第1部分中,我们介绍了相控阵转向概念,并研究了阵列增益的影响因素。在第 2 部分中,我们将讨论光栅瓣和光束斜视。光栅波瓣可能很难可视化,因此我们将利用它们与数字转换器中的信号混叠的相似性,然后用它来将光栅波瓣视为空间混叠。接下来,我们探讨光束斜视的问题。波束斜视是当我们使用相移而不是真正的时间延迟来控制波束时,天线在整个频率上的失焦。我们还将讨论这两种转向方法之间的权衡,并了解光束斜视对典型系统的影响。
光栅瓣简介
到目前为止,我们只看到了元素间距为 d = λ/2 的情况。图1开始说明为什么晶片间距λ/2是相控阵中如此常见的指标。显示了两个案例。首先,在蓝色中,重复第 30 部分图 11 中的相同 1° 图。接下来,将d/λ间距增加到0.7,以显示天线方向图如何变化。随着间距的增加,请注意波束宽度是如何减小的,这是一个积极的结果。零点间距的减小使它们更紧密地结合在一起,这也是一个可接受的结果。但现在有第二个角度,在本例中为–70°,那里有全阵列增益。这是一个非常不幸的结果。天线增益的复制品定义为光栅瓣,可视为空间混叠。
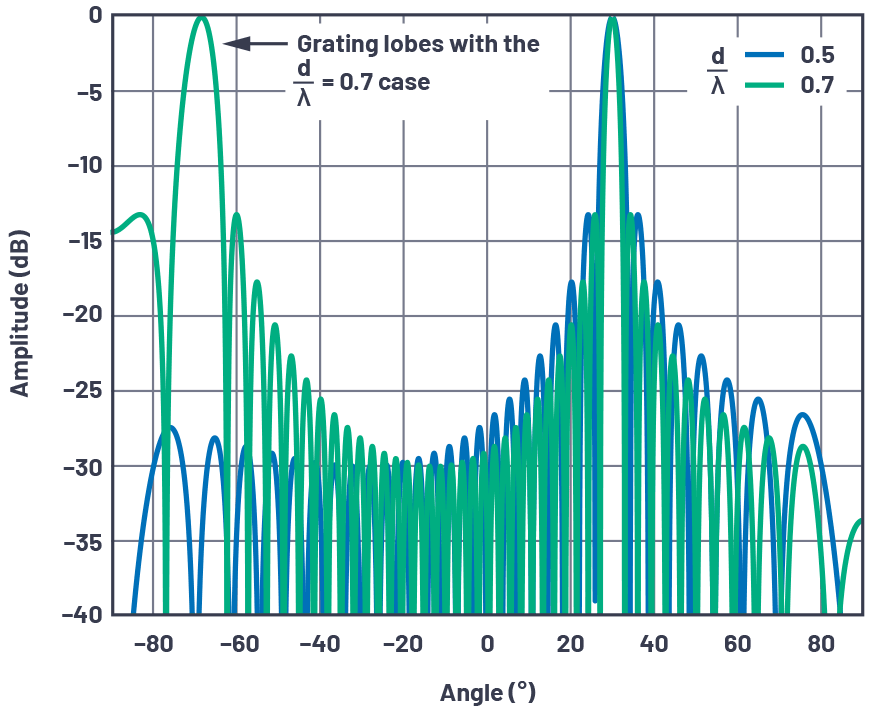
图1.两个不同 d/λ 间距的 32 元素线性阵列的归一化数组因子。
与采样系统的类比
可视化光栅瓣的一个类比是考虑采样系统中的混叠。在模数转换器(ADC)中,在频率规划接收器架构时,通常使用欠采样。欠采样涉及有目的地降低采样率(fS),使得采样过程转换高于f的频率S/2(较高的奈奎斯特区)在第一个奈奎斯特区中显示为别名。这会导致这些较高频率在ADC输出端看起来好像处于较低频率。
在相控阵中也可以考虑类似的类比,其中晶片对波前进行空间采样。如果我们建议每个波长需要两个样本(即元素)以避免混叠,奈奎斯特定理可以扩展到空间域。因此,如果元素间距大于 λ/2,我们可以考虑这种空间混叠。
计算光栅瓣出现的位置
但是这些空间别名(光栅瓣)会出现在哪里呢?在第1部分中,我们展示了应用于阵列中晶片的相移作为光束角的函数。

相反,我们可以计算光束角作为相移的函数。

arcsin 函数仅为 –1 和 +1 之间的参数生成实际解。在这些界限之外,解决方案不是真实的——电子表格软件中熟悉的“#NUM!另请注意,公式2中的相位是周期性的,每2π重复一次。因此,我们可以在波束转向方程中用 (m × 2π + ∆Φ) 代替 ∆Φ,得到公式 3。

其中 m = 0, ±1, ±2, ...
为了避免光栅瓣,我们的目标是获得一个真正的解决方案。在数学上,这是通过保持

如果我们这样做,那么所有的空间图像(即m = ±1,±2等)将产生非真实的arcsin结果,我们可以忽略它们。但是,如果我们不能做到这一点,因此 m > 0 的某些值会产生真正的反弧结果,那么我们最终会得到多种解决方案:光栅瓣。
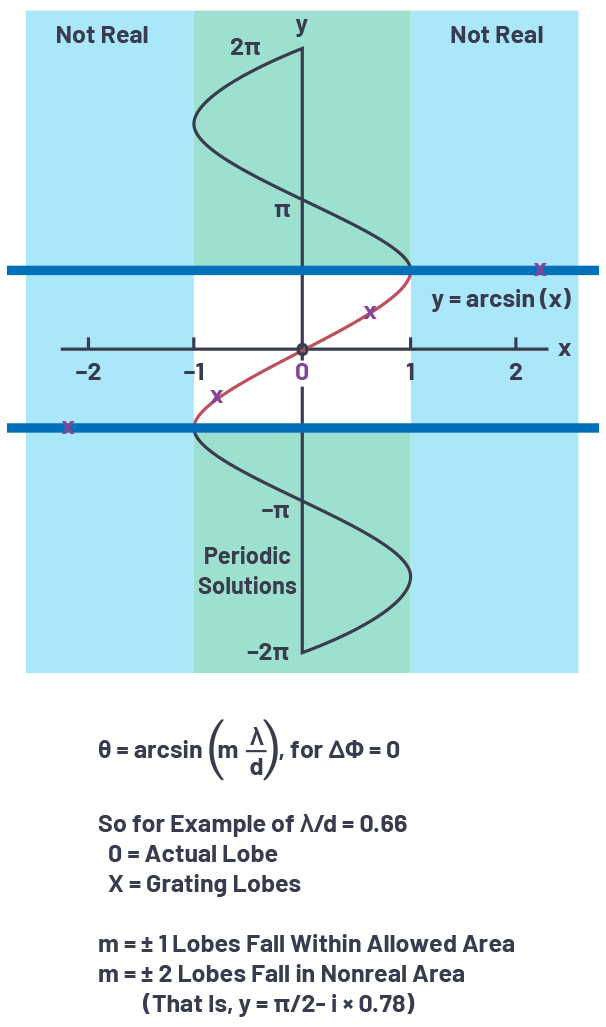
图2.弧轴函数在光栅瓣中的应用。
光栅瓣 d > λ 和 θ = 0°
让我们尝试一些示例来更好地说明这一点。首先,考虑机械视镜下的情况,其中 θ = 0,因此 ∆Φ = 0。然后,公式3简化为公式5。

从这种简化中可以明显看出,如果 λ/d > 1,那么只有 m = 0 可以给出一个介于 –1 和 +1 之间的参数。这个参数只是 0,arcsin(0) = 0°,即机械瞄准角。所以,这一切都如我们所期望的那样。此外,对于任何 m ≥ 1,arcsin 参数将太大 (>1),并且生成的答案将不是真实的。当 θ = 0 和 d < λ 时,我们将看不到光栅瓣!
但是,如果 d > λ(因此 λ/d 为 <1),则可能存在多种解,即光栅瓣。例如,如果 λ/d = 0.66(即 d = 1.5λ),则当 m = 0 和 m = ±1 时,将存在实反弧解。m = ±1是第二个解决方案,即所需信号的空间混叠。因此,我们可以期待看到三个主瓣,每个波瓣的振幅大致相等,分别位于arcsin(0 × 0.66),arcsin(1 × 0.66)和arcsin(–1 × 0.66)。以度为单位,这些角度为 0° 和 ±41.3°。事实上,这就是我们的阵列因子图如图 3 所示。
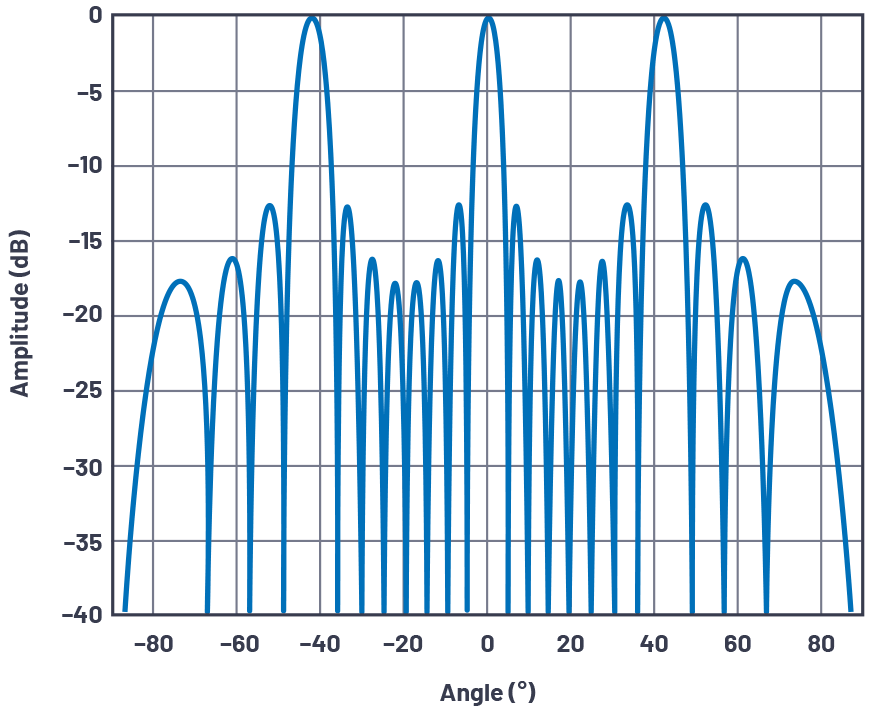
图3.视线时的阵列系数为 d/λ = 1.5,N = 8。
光栅瓣 λ/2 < d < λ
在简化光栅瓣方程(公式5)时,我们选择只看机械视孔(∆Φ = 0)。我们看到,在机械视线下,光栅瓣不会出现d<λ。但是从我们对采样理论的类比中,我们知道我们也应该期望看到任何大于λ/2的间距的某种光栅瓣。那么 λ/2 < d < λ 的光栅瓣在哪里?
首先,回想一下第 4 部分图 1 中的相位如何随转向角而变化。我们看到∆Φ范围从0到±π,因为主瓣偏离了机械视线。因此

将范围

而对于|米|≥ 1,它将永远超越

这限制了最小允许的λ/d,如果我们想将整个arcsin参数保持>所有|m的1|≥ 1.考虑两种情况:
如果 λ/d ≥ 2(即 d ≤ λ/2),则无论 m 的值如何,您都不可能有多个解。所有 m > 0 解决方案都将在 1 >产生 arcsin 参数。这是避免光栅瓣到地平线的唯一方法。
但是,如果我们故意将∆Φ限制在小于±π的水平,那么我们可以容忍较小的λ / d并且仍然看不到光栅瓣。减小∆Φ的范围意味着减小阵列的最大转向角。这是一个有趣的权衡,将在下一节中探讨。
元素间距注意事项
元素间距是否应始终小于 λ/2?不一定!这成为天线设计人员需要考虑的权衡。如果光束完全转向地平线,则θ = ±90,并且需要λ/2的单元间距(如果可见半球不允许光栅瓣)。但在实践中,可实现的最大转向角始终小于 90。这是由于元素因素和大转向角下的其他退化造成的。°°
从弧线图(图2)中,我们可以看到,如果y轴θ被限制在减小的极限内,则光栅波瓣仅出现在无论如何都不使用的扫描角度处。这个减少的极限(θ.max) 表示给定元素间距 (d.max)?我们之前说过,我们的目标是保持

我们可以用它来计算我们的第一个光栅瓣(m = ±1)会出现在哪里。进行此更改,并使用第 1 部分中的公式 1 表示 ∆Φ,得到:

这简化为

然后求解 d.max

这 d.max是在减小的扫描角度(θ.max),其中 θ.max小于 π/2 (90°)。例如,如果信号频率为 10 GHz,我们需要在没有光栅瓣的情况下转向 ±50°,则最大元件间距为:

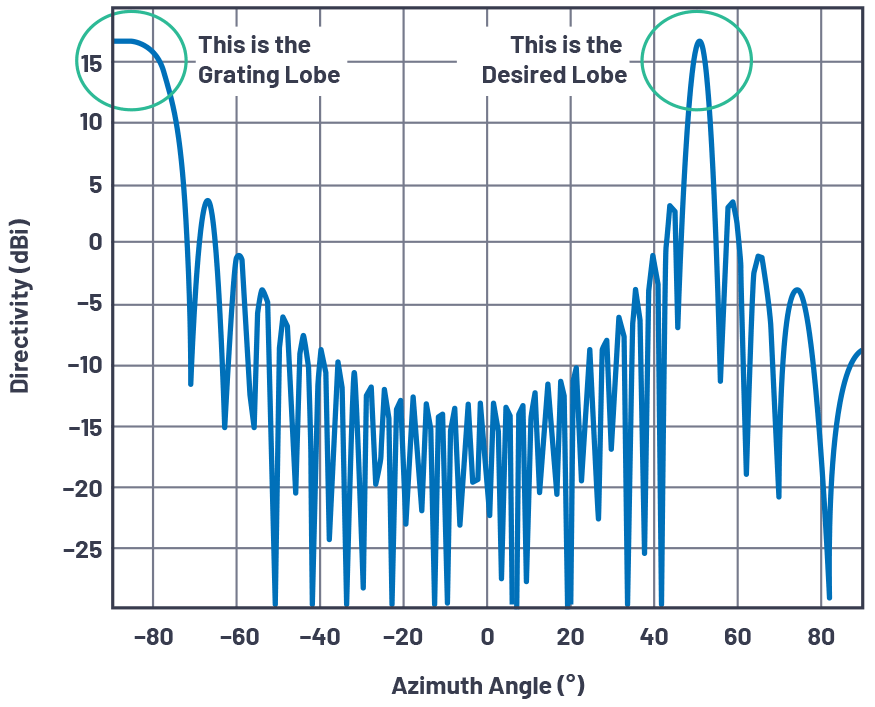
图4.光栅瓣开始出现在地平线上,θ = 50°,N = 32,d = 17 mm,Φ = 10 GHz。
因此,限制最大扫描角度可以自由地扩展元件间距,以增加每个通道的物理尺寸,并扩展给定数量元件的孔径。可以利用这种现象的示例应用是将天线分配给相当狭窄的预定义方向。对于预定义方向的方向性,可以增加晶片增益,也可以为更大的孔径增加晶片间距。两者都会导致在窄波束角内获得更大的整体天线增益。
请注意,公式3表示一个波长的最大间距,即使转向角为零也是如此。如果在可见半球不能容忍光栅叶,则会出现这种情况。例如,在GEO卫星的情况下,整个地球都被机械瞄准镜9°的转向角覆盖。光栅瓣可能是可以容忍的,只要它们不落在地球表面。在这种情况下,晶片间距可以是几个波长,导致更窄的波束宽度。
还有一些值得注意的天线架构试图通过产生不均匀的元件间距来克服光栅瓣问题。这些被归类为非周期性阵列,以螺旋阵列为例。出于机械天线结构的原因,可能需要有一个可以缩放到更大阵列的通用构建块,但这会产生一个受所述光栅瓣条件影响的均匀阵列。
光束斜视
我们在第 1 部分的开头描述了当波前接近元素阵列时,基于波前角 θ 相对于视线的波前角 θ,元素之间如何存在时间延迟。对于单个频率,可以通过用相移代替时间延迟来实现波束控制。这适用于窄带波形,但对于波束控制由相移产生的宽带波形,波束可以随频率改变方向。如果我们记住时间延迟是线性相移与频率的关系,则可以直观地解释这一点。因此,对于给定的波束方向,所需的相移随频率的变化。或者相反,对于给定的相移,光束方向随频率变化。光束角随频率变化的概念称为光束斜视。
还要考虑到,在视线θ = 0时,晶片之间没有相移,因此无法产生任何光束斜视。因此,光束斜视量必须与角度θ以及频率变化成函数。图 5 显示了一个 X 波段示例。在本例中,中心频率为10 GHz,调制带宽为2 GHz,很明显,波束会随着频率和初始波束角的函数而改变方向。
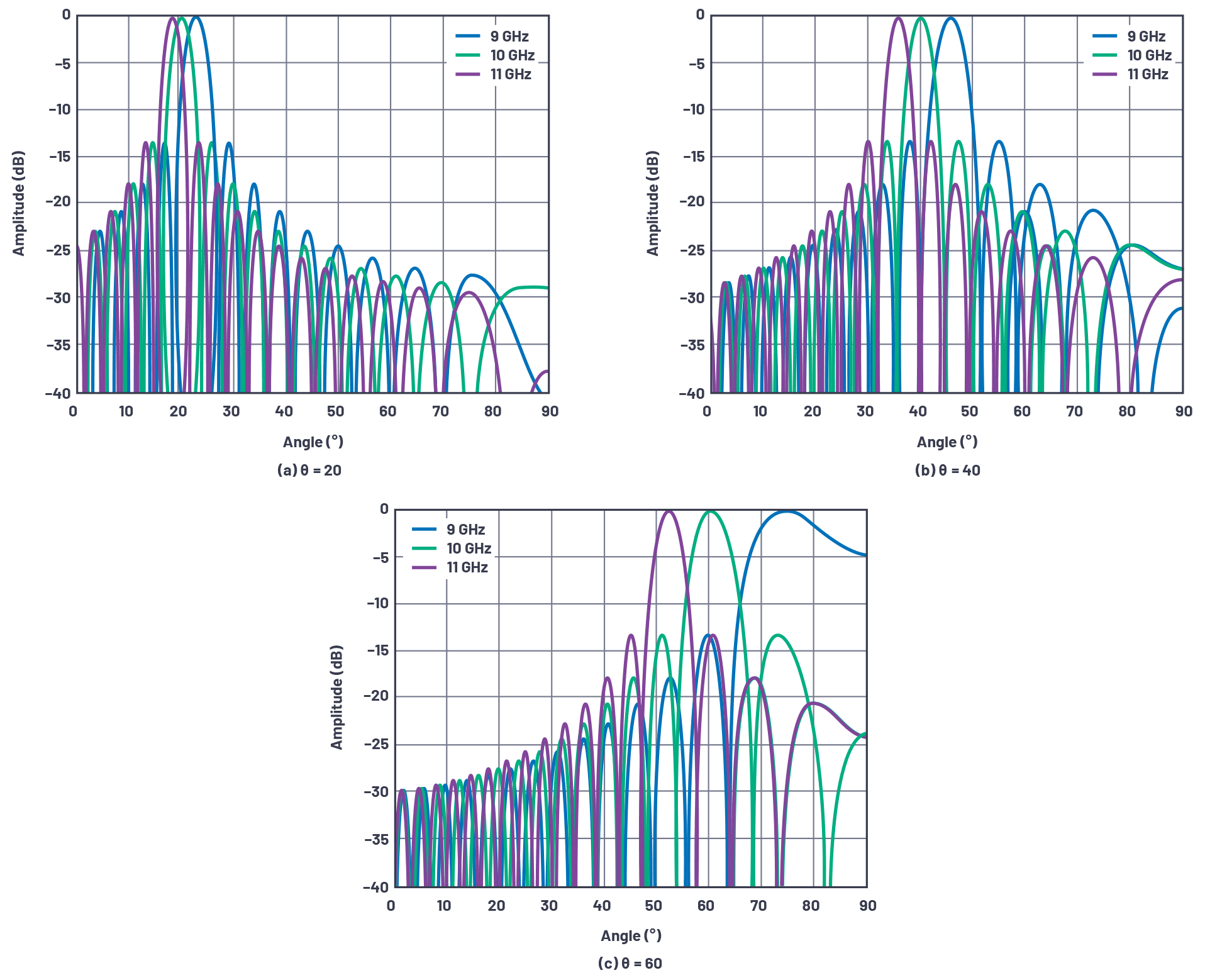
图5.X 波段的光束斜视示例,用于具有 λ/32 晶片间距的 2 晶片线性阵列。
光束斜视可以直接计算。使用公式1和公式2,光束方向偏差(光束斜视)可以计算为:

该等式如图6所示。在图6中,f/f。0显示的比例是有意为之。(f0上一个等式中的 /f) 提供了一种更简单的方法来可视化相对于中心频率的变化。
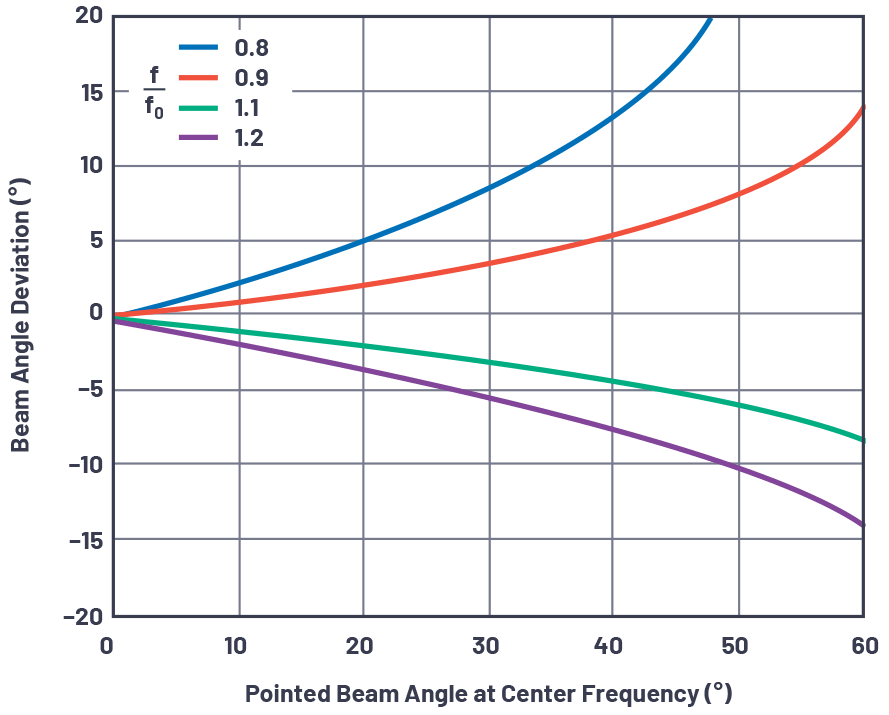
图6.几个频率偏差的光束斜视与光束角的关系。
关于光束斜视的一些观察:
光束角与频率的偏差随着远离视线的光束角的增加而增加。
低于中心频率的频率比高于中心频率的频率会导致更大的偏差。
低于中心频率的频率使光束远离视线。
光束斜视注意事项
光束斜视,转向角与频率的偏差,是由相移近似的时间延迟引起的。使用真正的时间延迟单元实现波束控制不存在这个问题。
由于光束斜视问题如此清晰可见,为什么有人会使用移相器而不是时间延迟单元?通常,这归结为设计简单性和移相器的IC可用性与时间延迟。时间延迟在某种形式的传输线中实现,所需的总延迟是孔径大小的函数。迄今为止,大多数可用的模拟波束成形IC都是基于相移的,但出现了一系列真正的延时IC,这些IC在相控阵实现中可能变得更加普遍。
在数字波束成形中,可以在DSP逻辑和数字波束成形算法中实现真正的时间延迟。因此,每个晶片都数字化的相控阵架构自然有助于克服声束斜视问题,同时提供最具可编程性的灵活性。但是,这种解决方案的功耗、尺寸和成本可能存在问题。
在混合波束成形中,子阵列采用模拟波束成形,然后是全阵列的数字波束成形。这可以提供一些值得考虑的自然光束斜视缓解。光束斜视仅受子阵列的影响,子阵列的波束宽度要宽得多,因此它对光束角偏差的容忍度更高。因此,只要子阵列波束斜视是可以容忍的,那么混合波束成形架构就可以在子阵列中使用移相器来实现,然后在数字波束成形中实现真正的时间延迟。
总结
相控阵天线方向图由三部分组成的系列文章的第2部分到此结束。在第 1 部分中,我们介绍了光束指向和阵列因子。在第 2 部分中,我们介绍了光栅瓣和光束斜视的缺陷。在第3部分中,我们将讨论逐渐变细作为减少旁瓣的方法,并深入了解移相器量化误差的影响。
审核编辑:郭婷
-
相控阵天线方向图2026-01-07 4364
-
什么是相控阵天线 相控阵天线波束形成原理2023-07-11 14873
-
相控阵天线方向图:线阵波束特性和阵列因数2023-02-07 15818
-
多波束相控阵天线的应用优势2022-05-06 11398
-
深入探讨相控阵天线方向图2022-03-14 7223
-
相控阵天线-栅瓣和波束斜视.pdf2021-12-22 1261
-
相控阵天线原理_相控阵天线设计2021-01-07 13345
-
相控阵天线方向图——锥削对整个阵列的影响2020-12-24 2593
-
相控阵天线方向图——第2部分:栅瓣和波束斜视2020-12-07 7551
-
相控阵天线通道误差对波束形成有什么样的影响2020-08-25 1239
-
机载天线方向图位置优化配置设计2019-07-04 2557
-
相控阵天线通道误差对波束形成有什么影响2019-06-13 2146
-
HFSS结合UTD计算,分析机载对相控阵天线方向图的影响2019-03-13 3097
-
相控阵天线波束控制的基本原理和波控系统的任务2009-10-06 1252
全部0条评论

快来发表一下你的评论吧 !
