

7个流行的强化学习算法及代码实现
电子说
描述
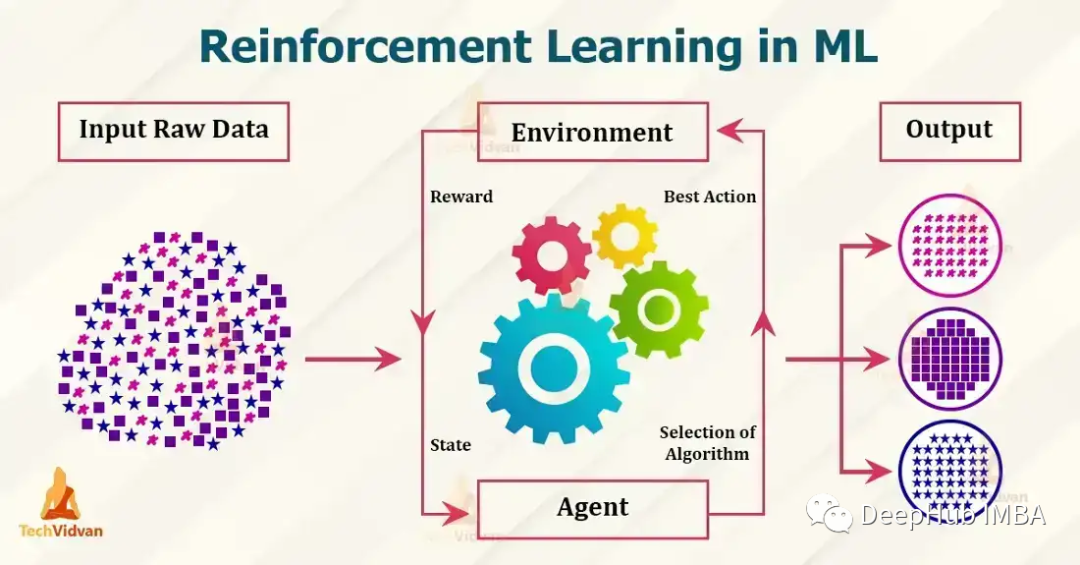
目前流行的强化学习算法包括 Q-learning、SARSA、DDPG、A2C、PPO、DQN 和 TRPO。这些算法已被用于在游戏、机器人和决策制定等各种应用中,并且这些流行的算法还在不断发展和改进,本文我们将对其做一个简单的介绍。
1、Q-learningQ-learning:Q-learning 是一种无模型、非策略的强化学习算法。它使用 Bellman 方程估计最佳动作值函数,该方程迭代地更新给定状态动作对的估计值。Q-learning 以其简单性和处理大型连续状态空间的能力而闻名。下面是一个使用 Python 实现 Q-learning 的简单示例:
import numpy as np
# Define the Q-table and the learning rate
Q = np.zeros((state_space_size, action_space_size))
alpha = 0.1
# Define the exploration rate and discount factor
epsilon = 0.1
gamma = 0.99
for episode in range(num_episodes):
current_state = initial_state
while not done:
# Choose an action using an epsilon-greedy policy
if np.random.uniform(0, 1) < epsilon:
action = np.random.randint(0, action_space_size)
else:
action = np.argmax(Q[current_state])
# Take the action and observe the next state and reward
reward, done = take_action(current_state, action)
# Update the Q-table using the Bellman equation
action] = Q[current_state, action] + alpha * (reward + gamma * np.max(Q[next_state]) - Q[current_state, action])
current_state = next_state
上面的示例中,state_space_size 和 action_space_size 分别是环境中的状态数和动作数。num_episodes 是要为运行算法的轮次数。initial_state 是环境的起始状态。take_action(current_state, action) 是一个函数,它将当前状态和一个动作作为输入,并返回下一个状态、奖励和一个指示轮次是否完成的布尔值。
在 while 循环中,使用 epsilon-greedy 策略根据当前状态选择一个动作。使用概率 epsilon选择一个随机动作,使用概率 1-epsilon选择对当前状态具有最高 Q 值的动作。采取行动后,观察下一个状态和奖励,使用Bellman方程更新q。并将当前状态更新为下一个状态。这只是 Q-learning 的一个简单示例,并未考虑 Q-table 的初始化和要解决的问题的具体细节。2、SARSASARSA:SARSA 是一种无模型、基于策略的强化学习算法。它也使用Bellman方程来估计动作价值函数,但它是基于下一个动作的期望值,而不是像 Q-learning 中的最优动作。SARSA 以其处理随机动力学问题的能力而闻名。
import numpy as np
# Define the Q-table and the learning rate
Q = np.zeros((state_space_size, action_space_size))
alpha = 0.1
# Define the exploration rate and discount factor
epsilon = 0.1
gamma = 0.99
for episode in range(num_episodes):
current_state = initial_state
action = epsilon_greedy_policy(epsilon, Q, current_state)
while not done:
# Take the action and observe the next state and reward
reward, done = take_action(current_state, action)
# Choose next action using epsilon-greedy policy
next_action = epsilon_greedy_policy(epsilon, Q, next_state)
# Update the Q-table using the Bellman equation
action] = Q[current_state, action] + alpha * (reward + gamma * Q[next_state, next_action] - Q[current_state, action])
current_state = next_state
action = next_action
state_space_size和action_space_size分别是环境中的状态和操作的数量。num_episodes是您想要运行SARSA算法的轮次数。Initial_state是环境的初始状态。take_action(current_state, action)是一个将当前状态和作为操作输入的函数,并返回下一个状态、奖励和一个指示情节是否完成的布尔值。
在while循环中,使用在单独的函数epsilon_greedy_policy(epsilon, Q, current_state)中定义的epsilon-greedy策略来根据当前状态选择操作。使用概率 epsilon选择一个随机动作,使用概率 1-epsilon对当前状态具有最高 Q 值的动作。上面与Q-learning相同,但是采取了一个行动后,在观察下一个状态和奖励时它然后使用贪心策略选择下一个行动。并使用Bellman方程更新q表。3、DDPGDDPG 是一种用于连续动作空间的无模型、非策略算法。它是一种actor-critic算法,其中actor网络用于选择动作,而critic网络用于评估动作。DDPG 对于机器人控制和其他连续控制任务特别有用。
import numpy as np
from keras.models import Model, Sequential
from keras.layers import Dense, Input
from keras.optimizers import Adam
# Define the actor and critic models
actor = Sequential()
actor.add(Dense(32, input_dim=state_space_size, activation='relu'))
actor.add(Dense(32, activation='relu'))
actor.add(Dense(action_space_size, activation='tanh'))
actor.compile(loss='mse', optimizer=Adam(lr=0.001))
critic = Sequential()
critic.add(Dense(32, input_dim=state_space_size, activation='relu'))
critic.add(Dense(32, activation='relu'))
critic.add(Dense(1, activation='linear'))
critic.compile(loss='mse', optimizer=Adam(lr=0.001))
# Define the replay buffer
replay_buffer = []
# Define the exploration noise
exploration_noise = OrnsteinUhlenbeckProcess(size=action_space_size, theta=0.15, mu=0, sigma=0.2)
for episode in range(num_episodes):
current_state = initial_state
while not done:
# Select an action using the actor model and add exploration noise
action = actor.predict(current_state)[0] + exploration_noise.sample()
action = np.clip(action, -1, 1)
# Take the action and observe the next state and reward
next_state, reward, done = take_action(current_state, action)
# Add the experience to the replay buffer
replay_buffer.append((current_state, action, reward, next_state, done))
# Sample a batch of experiences from the replay buffer
batch = sample(replay_buffer, batch_size)
# Update the critic model
states = np.array([x[0] for x in batch])
actions = np.array([x[1] for x in batch])
rewards = np.array([x[2] for x in batch])
next_states = np.array([x[3] for x in batch])
target_q_values = rewards + gamma * critic.predict(next_states)
critic.train_on_batch(states, target_q_values)
# Update the actor model
action_gradients = np.array(critic.get_gradients(states, actions))
actor.train_on_batch(states, action_gradients)
current_state = next_state
在本例中,state_space_size和action_space_size分别是环境中的状态和操作的数量。num_episodes是轮次数。Initial_state是环境的初始状态。Take_action (current_state, action)是一个函数,它接受当前状态和操作作为输入,并返回下一个操作。4、A2CA2C(Advantage Actor-Critic)是一种有策略的actor-critic算法,它使用Advantage函数来更新策略。该算法实现简单,可以处理离散和连续的动作空间。
import numpy as np
from keras.models import Model, Sequential
from keras.layers import Dense, Input
from keras.optimizers import Adam
from keras.utils import to_categorical
# Define the actor and critic models
state_input = Input(shape=(state_space_size,))
actor = Dense(32, activation='relu')(state_input)
actor = Dense(32, activation='relu')(actor)
actor = Dense(action_space_size, activation='softmax')(actor)
actor_model = Model(inputs=state_input, outputs=actor)
='categorical_crossentropy', optimizer=Adam(lr=0.001))
state_input = Input(shape=(state_space_size,))
critic = Dense(32, activation='relu')(state_input)
critic = Dense(32, activation='relu')(critic)
critic = Dense(1, activation='linear')(critic)
critic_model = Model(inputs=state_input, outputs=critic)
='mse', optimizer=Adam(lr=0.001))
for episode in range(num_episodes):
current_state = initial_state
done = False
while not done:
# Select an action using the actor model and add exploration noise
action_probs = actor_model.predict(np.array([current_state]))[0]
action = np.random.choice(range(action_space_size), p=action_probs)
# Take the action and observe the next state and reward
reward, done = take_action(current_state, action)
# Calculate the advantage
target_value = critic_model.predict(np.array([next_state]))[0][0]
advantage = reward + gamma * target_value - critic_model.predict(np.array([current_state]))[0][0]
# Update the actor model
action_one_hot = to_categorical(action, action_space_size)
advantage * action_one_hot)
# Update the critic model
reward + gamma * target_value)
current_state = next_state
在这个例子中,actor模型是一个神经网络,它有2个隐藏层,每个隐藏层有32个神经元,具有relu激活函数,输出层具有softmax激活函数。critic模型也是一个神经网络,它有2个隐含层,每层32个神经元,具有relu激活函数,输出层具有线性激活函数。使用分类交叉熵损失函数训练actor模型,使用均方误差损失函数训练critic模型。动作是根据actor模型预测选择的,并添加了用于探索的噪声。5、PPOPPO(Proximal Policy Optimization)是一种策略算法,它使用信任域优化的方法来更新策略。它在具有高维观察和连续动作空间的环境中特别有用。PPO 以其稳定性和高样品效率而著称。
import numpy as np
from keras.models import Model, Sequential
from keras.layers import Dense, Input
from keras.optimizers import Adam
# Define the policy model
state_input = Input(shape=(state_space_size,))
policy = Dense(32, activation='relu')(state_input)
policy = Dense(32, activation='relu')(policy)
policy = Dense(action_space_size, activation='softmax')(policy)
policy_model = Model(inputs=state_input, outputs=policy)
# Define the value model
value_model = Model(inputs=state_input, outputs=Dense(1, activation='linear')(policy))
# Define the optimizer
optimizer = Adam(lr=0.001)
for episode in range(num_episodes):
current_state = initial_state
while not done:
# Select an action using the policy model
action_probs = policy_model.predict(np.array([current_state]))[0]
action = np.random.choice(range(action_space_size), p=action_probs)
# Take the action and observe the next state and reward
reward, done = take_action(current_state, action)
# Calculate the advantage
target_value = value_model.predict(np.array([next_state]))[0][0]
advantage = reward + gamma * target_value - value_model.predict(np.array([current_state]))[0][0]
# Calculate the old and new policy probabilities
old_policy_prob = action_probs[action]
new_policy_prob = policy_model.predict(np.array([next_state]))[0][action]
# Calculate the ratio and the surrogate loss
ratio = new_policy_prob / old_policy_prob
surrogate_loss = np.minimum(ratio * advantage, np.clip(ratio, 1 - epsilon, 1 + epsilon) * advantage)
# Update the policy and value models
= value_model.trainable_weights
=optimizer, loss=-surrogate_loss)
np.array([action_one_hot]))
reward + gamma * target_value)
current_state = next_state
6、DQNDQN(深度 Q 网络)是一种无模型、非策略算法,它使用神经网络来逼近 Q 函数。DQN 特别适用于 Atari 游戏和其他类似问题,其中状态空间是高维的,并使用神经网络近似 Q 函数。
import numpy as np
from keras.models import Sequential
from keras.layers import Dense, Input
from keras.optimizers import Adam
from collections import deque
# Define the Q-network model
model = Sequential()
model.add(Dense(32, input_dim=state_space_size, activation='relu'))
model.add(Dense(32, activation='relu'))
model.add(Dense(action_space_size, activation='linear'))
model.compile(loss='mse', optimizer=Adam(lr=0.001))
# Define the replay buffer
replay_buffer = deque(maxlen=replay_buffer_size)
for episode in range(num_episodes):
current_state = initial_state
while not done:
# Select an action using an epsilon-greedy policy
if np.random.rand() < epsilon:
action = np.random.randint(0, action_space_size)
else:
action = np.argmax(model.predict(np.array([current_state]))[0])
# Take the action and observe the next state and reward
next_state, reward, done = take_action(current_state, action)
# Add the experience to the replay buffer
replay_buffer.append((current_state, action, reward, next_state, done))
# Sample a batch of experiences from the replay buffer
batch = random.sample(replay_buffer, batch_size)
# Prepare the inputs and targets for the Q-network
inputs = np.array([x[0] for x in batch])
targets = model.predict(inputs)
for i, (state, action, reward, next_state, done) in enumerate(batch):
if done:
targets[i, action] = reward
else:
targets[i, action] = reward + gamma * np.max(model.predict(np.array([next_state]))[0])
# Update the Q-network
model.train_on_batch(inputs, targets)
current_state = next_state
上面的代码,Q-network有2个隐藏层,每个隐藏层有32个神经元,使用relu激活函数。该网络使用均方误差损失函数和Adam优化器进行训练。7、TRPOTRPO (Trust Region Policy Optimization)是一种无模型的策略算法,它使用信任域优化方法来更新策略。它在具有高维观察和连续动作空间的环境中特别有用。TRPO 是一个复杂的算法,需要多个步骤和组件来实现。TRPO不是用几行代码就能实现的简单算法。所以我们这里使用实现了TRPO的现有库,例如OpenAI Baselines,它提供了包括TRPO在内的各种预先实现的强化学习算法,。要在OpenAI Baselines中使用TRPO,我们需要安装:
pip install baselines
然后可以使用baselines库中的trpo_mpi模块在你的环境中训练TRPO代理,这里有一个简单的例子:
import gym
from baselines.common.vec_env.dummy_vec_env import DummyVecEnv
from baselines.trpo_mpi import trpo_mpi
#Initialize the environment
env = gym.make("CartPole-v1")
env = DummyVecEnv([lambda: env])
# Define the policy network
policy_fn = mlp_policy
#Train the TRPO model
model = trpo_mpi.learn(env, policy_fn, max_iters=1000)
我们使用Gym库初始化环境。然后定义策略网络,并调用TRPO模块中的learn()函数来训练模型。还有许多其他库也提供了TRPO的实现,例如TensorFlow、PyTorch和RLLib。下面时一个使用TF 2.0实现的样例:
import tensorflow as tf
import gym
# Define the policy network
class PolicyNetwork(tf.keras.Model):
def __init__(self):
super(PolicyNetwork, self).__init__()
self.dense1 = tf.keras.layers.Dense(16, activation='relu')
self.dense2 = tf.keras.layers.Dense(16, activation='relu')
self.dense3 = tf.keras.layers.Dense(1, activation='sigmoid')
def call(self, inputs):
x = self.dense1(inputs)
x = self.dense2(x)
x = self.dense3(x)
return x
# Initialize the environment
env = gym.make("CartPole-v1")
# Initialize the policy network
policy_network = PolicyNetwork()
# Define the optimizer
optimizer = tf.optimizers.Adam()
# Define the loss function
loss_fn = tf.losses.BinaryCrossentropy()
# Set the maximum number of iterations
max_iters = 1000
# Start the training loop
for i in range(max_iters):
# Sample an action from the policy network
action = tf.squeeze(tf.random.categorical(policy_network(observation), 1))
# Take a step in the environment
observation, reward, done, _ = env.step(action)
with tf.GradientTape() as tape:
# Compute the loss
loss = loss_fn(reward, policy_network(observation))
# Compute the gradients
grads = tape.gradient(loss, policy_network.trainable_variables)
# Perform the update step
optimizer.apply_gradients(zip(grads, policy_network.trainable_variables))
if done:
# Reset the environment
observation = env.reset()
在这个例子中,我们首先使用TensorFlow的Keras API定义一个策略网络。然后使用Gym库和策略网络初始化环境。然后定义用于训练策略网络的优化器和损失函数。在训练循环中,从策略网络中采样一个动作,在环境中前进一步,然后使用TensorFlow的GradientTape计算损失和梯度。然后我们使用优化器执行更新步骤。这是一个简单的例子,只展示了如何在TensorFlow 2.0中实现TRPO。TRPO是一个非常复杂的算法,这个例子没有涵盖所有的细节,但它是试验TRPO的一个很好的起点。总结
以上就是我们总结的7个常用的强化学习算法,这些算法并不相互排斥,通常与其他技术(如值函数逼近、基于模型的方法和集成方法)结合使用,可以获得更好的结果。
END
欢迎加入Imagination GPU与人工智能交流2群 入群请加小编微信:eetrend89
入群请加小编微信:eetrend89(添加请备注公司名和职称)
推荐阅读 对话Imagination中国区董事长:以GPU为支点加强软硬件协同,助力数字化转型手机芯片这个功能,有望改变市场格局!
Imagination Technologies 是一家总部位于英国的公司,致力于研发芯片和软件知识产权(IP),基于Imagination IP的产品已在全球数十亿人的电话、汽车、家庭和工作 场所中使用。获取更多物联网、智能穿戴、通信、汽车电子、图形图像开发等前沿技术信息,欢迎关注 Imagination Tech!
原文标题:7个流行的强化学习算法及代码实现
文章出处:【微信公众号:Imagination Tech】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 热点推荐
- imagination
-
18个常用的强化学习算法整理:从基础方法到高级模型的理论技术与代码实现2025-04-23 1956
-
如何使用 PyTorch 进行强化学习2024-11-05 1925
-
基于强化学习的目标检测算法案例2023-07-19 1177
-
什么是深度强化学习?深度强化学习算法应用分析2023-07-01 2312
-
彻底改变算法交易:强化学习的力量2023-06-09 1102
-
7个流行的强化学习算法及代码实现2023-02-06 6355
-
强化学习的基础知识和6种基本算法解释2022-12-20 2006
-
机器学习中的无模型强化学习算法及研究综述2021-04-08 1416
-
深度强化学习实战2021-01-10 2952
-
基于PPO强化学习算法的AI应用案例2020-07-29 3637
-
反向强化学习的思路2019-04-03 2484
-
如何构建强化学习模型来训练无人车算法2018-11-12 5723
-
基于强化学习的MADDPG算法原理及实现2018-11-02 23241
-
将深度学习和强化学习相结合的深度强化学习DRL2018-06-29 28849
全部0条评论

快来发表一下你的评论吧 !
