

激光雷达的主要应用场景 车载激光雷达的特点
MEMS/传感技术
描述
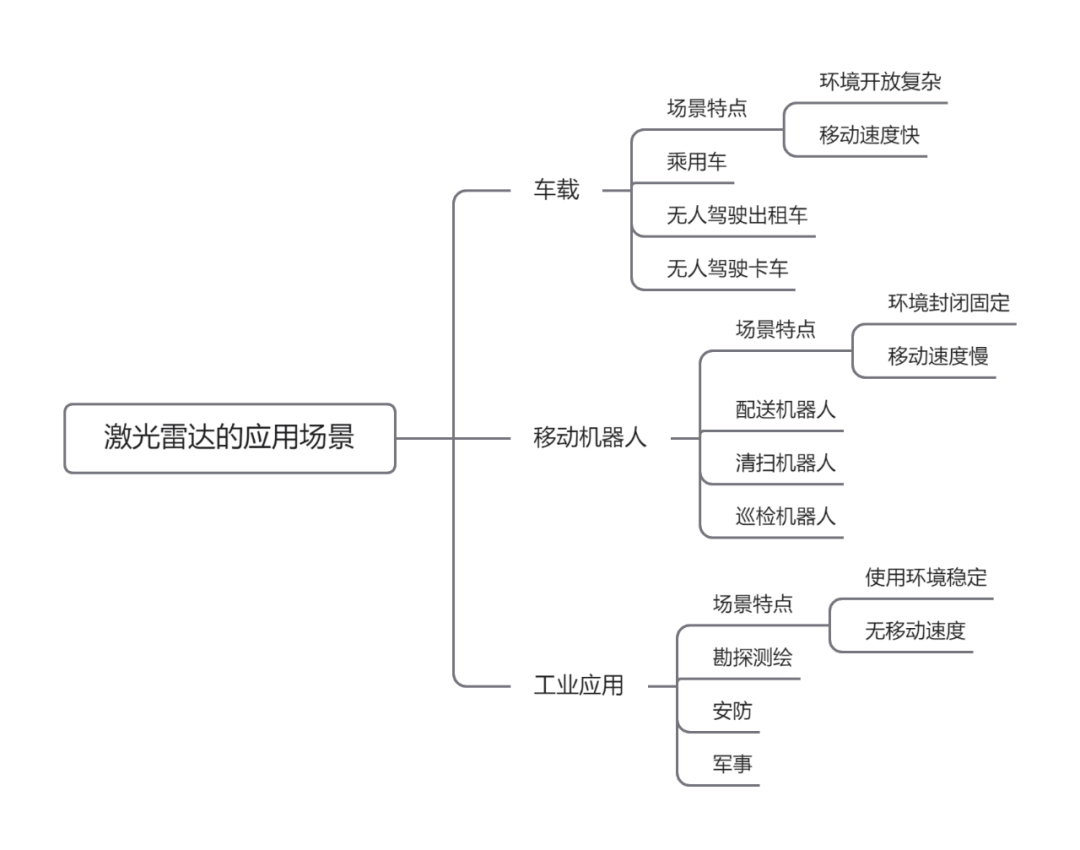
1. 激光雷达的主要应用场景?
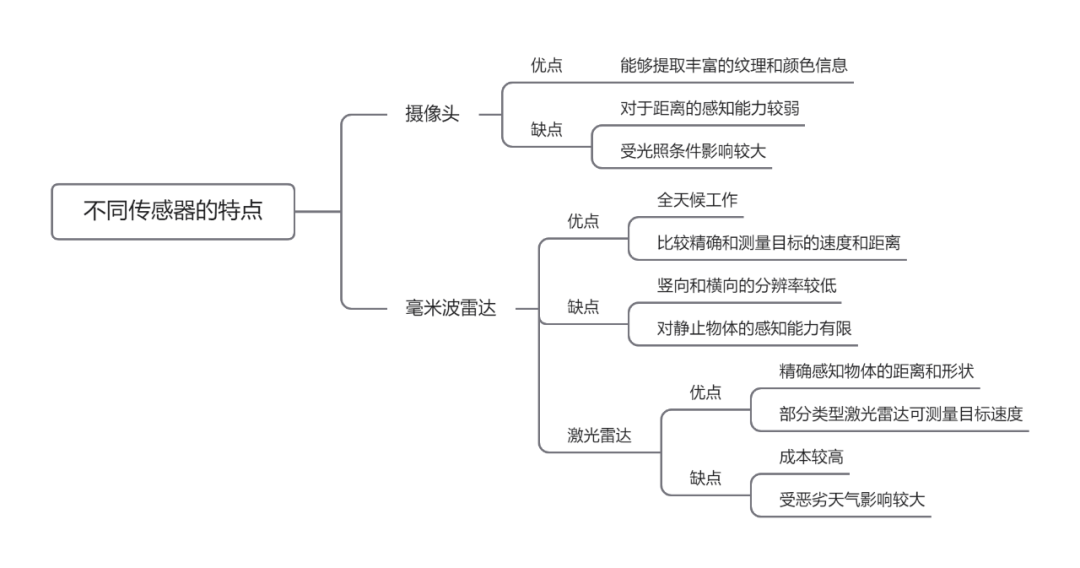
2. 不同无人驾驶传感器的优缺点?
3. 车载激光雷达的技术路线有哪些?
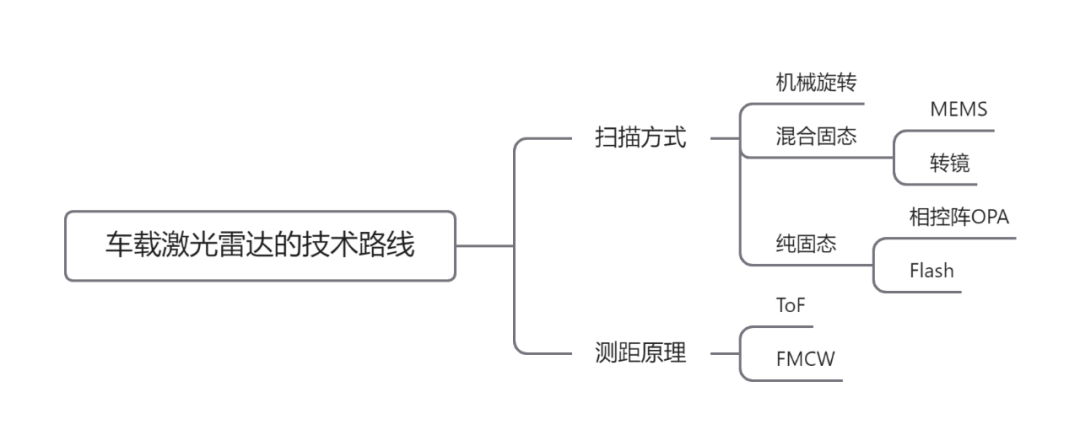
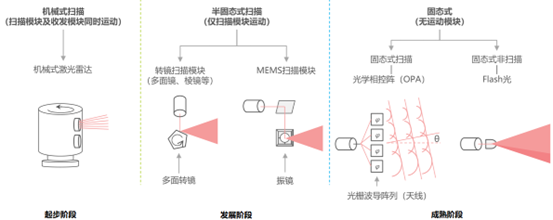
4. 按扫描方式区分,车载激光雷达的特点是什么?

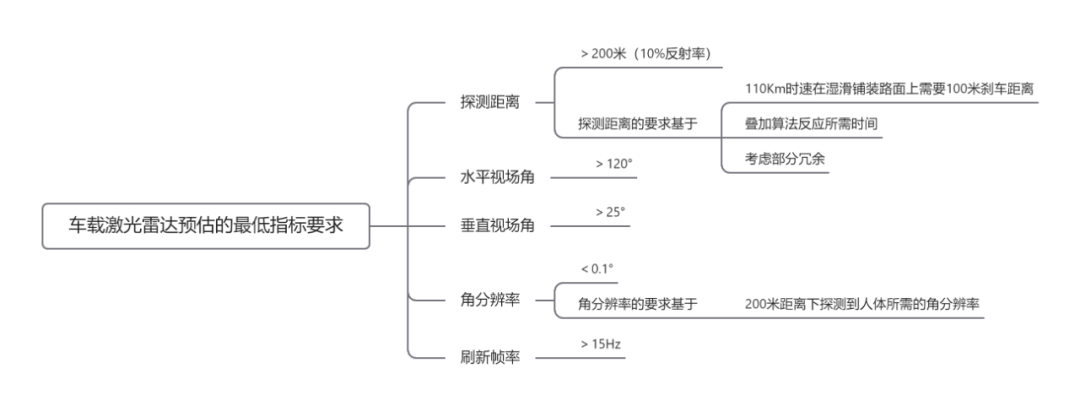
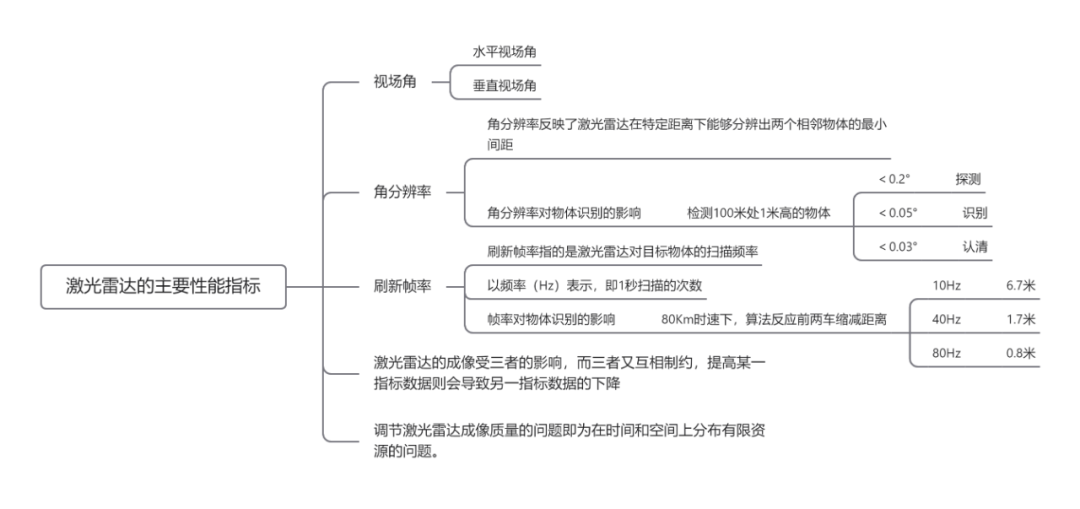
5. 激光雷达的主要性能指标是什么?
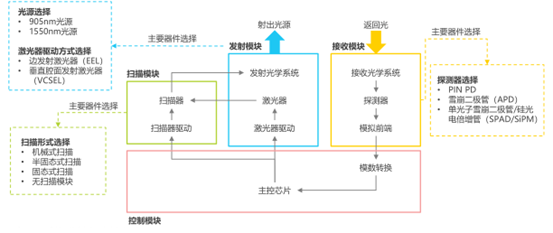
6. 激光雷达的硬件模块有哪些?
7. 车载激光雷达的发展阶段有哪些?
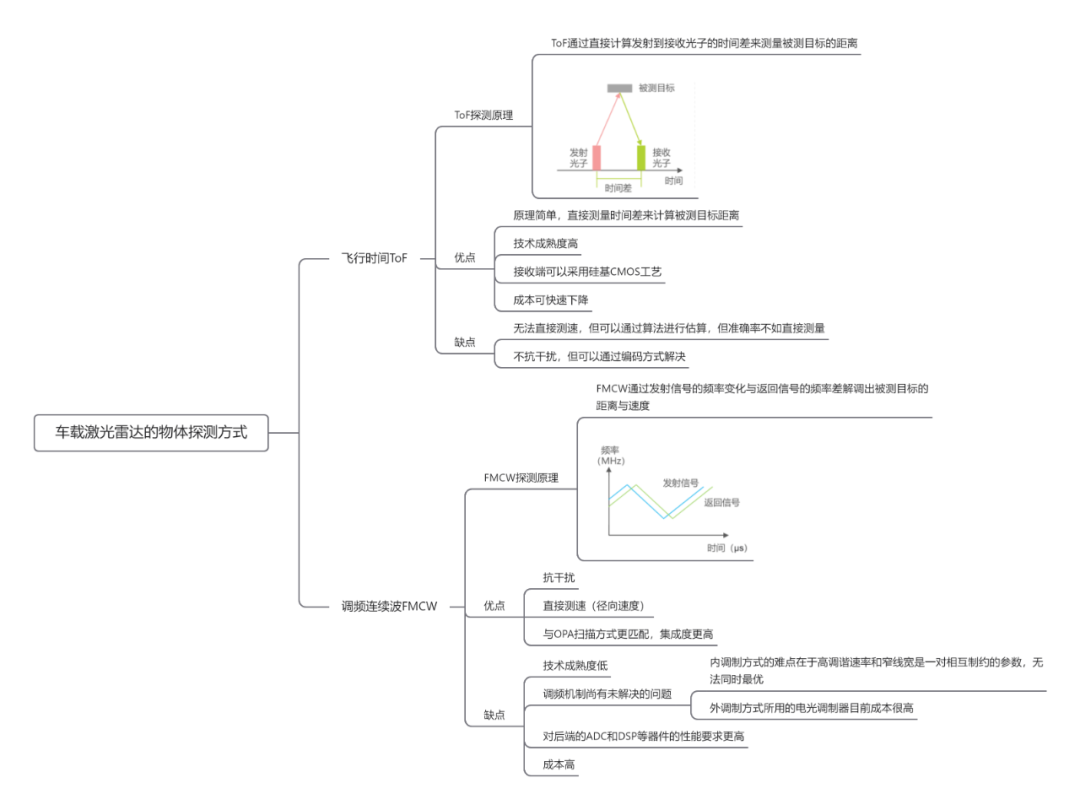
8. 目前,车载激光雷达的物体探测方式有哪些?
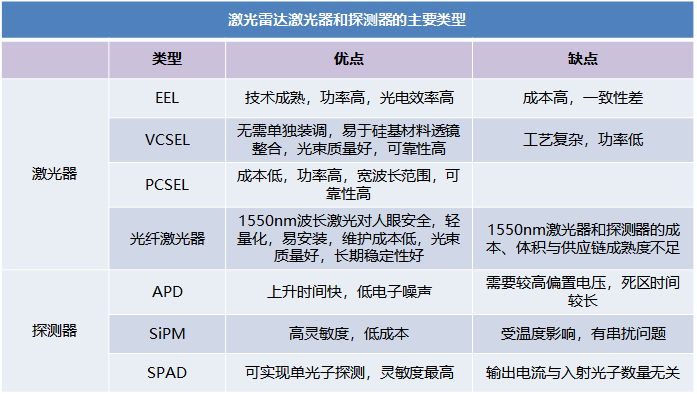
9. 激光雷达的发射器和接收器有哪些类型?
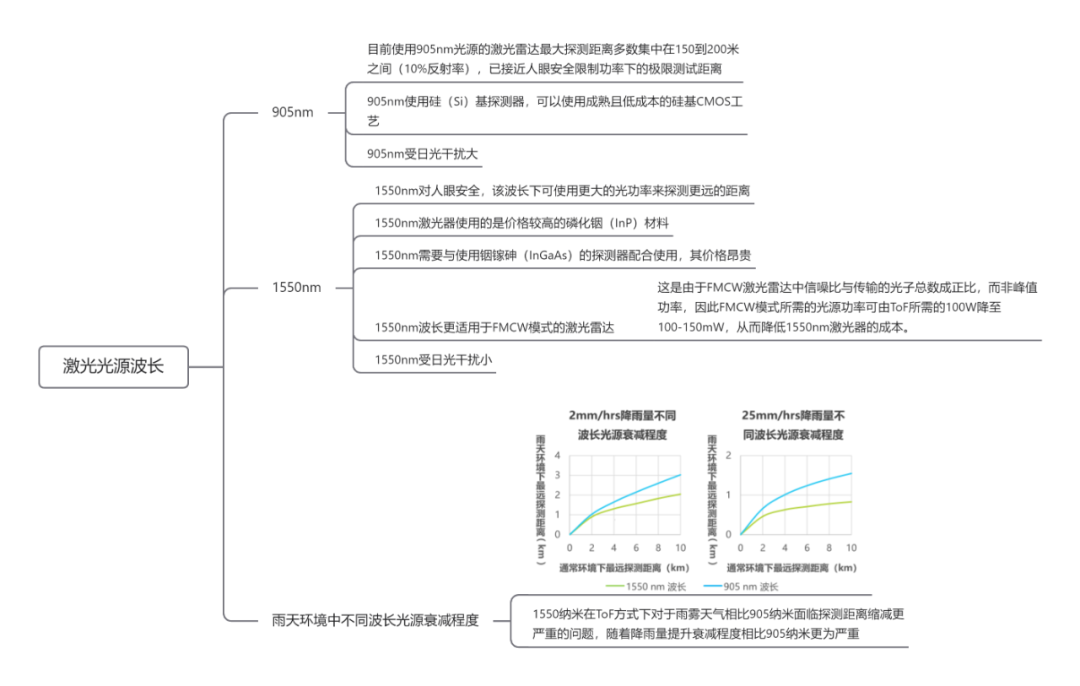
10. 激光雷达的激光器波长有哪些?
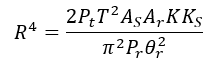
11. 影响激光雷达探测距离有哪些因素?
激光雷达测距公式:
其中,
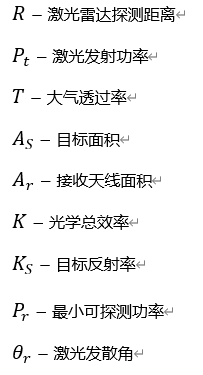
激光发射功率越高,探测距离越远。激光发射功率的提高主要取决于激光芯片的 光功率密度。若发射功率提高1倍,则激光雷达探测距离将提升19%。而激光芯片的发射功率是“激光芯片功率密度”和“发光面积”两者的乘积,发光面积由于激光雷达体积、激光芯片技术、成本、光学系统设计难易程度四个方面原因的制约,提升空间有限;所以激光芯片的光功率密度成为提高激光发射功率从而提升激光雷达探测距离的关键指标。
光电探测器最小可探测功率越小,探测距离越远。最小可探测功率取决于PDE和暗计数。若PDE提高1倍,即最小可探测功率减小50%,则激光雷达探测距离将提升19%。光电探测器的基本功能是把入射光功率转化为相应的光电流。最小可探测功率表示APD、SPAD、SiPM 等光电探测器所能探测到的最小入射光功率,入射光功率低于这个值 则将被噪声淹没无法被探测器探测到;NEP代表在信噪比为1时所需要的最小输入光信号功率,所以NEP代表了最小可探测功率。
激光发散角越小,探测距离越远。激光发散角取决于发射光学系统的准直性能。若发散角减小50%,则激光雷达探测距离将提升41%。不论VCSEL还是EEL,激光从激光芯片发射出来都存在一定的发散角θ,发散角直接影响了激光发射到目标物体表面的光斑面积从而影响了激光打在目标物体上的光功率密度,最终影响从目标物体表面反射回探测器表面的入射光功率。激光雷达的发射光学系统中一般有准直镜和扩束镜,能够减小激光的发散角。但是即使光学系统的准直性能再好,激光光束也不可能完全准直到0,始终存在一定的发散角,不可能完全是平行光,光学系统只可能尽可能减小发散角。例如,VCSEL的远场发散角典型值为25°,如果不进行准直,传播到100米处时光斑的半径就会变成47米,由此可见通过准直减小光束发散角的重要性。
编辑:黄飞
-
激光雷达的应用场景2024-03-21 3327
-
单线激光雷达和多线激光雷达区别2023-12-07 7562
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30509
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10123
-
激光雷达2021-01-17 20216
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41713
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21279
-
TOF激光雷达2019-06-07 9306
-
机器人和激光雷达都不可或缺2019-02-15 6228
-
北醒固态设计激光雷达2018-01-25 5888
-
消费级激光雷达的起航2017-12-07 7509
-
常见激光雷达种类2017-09-25 14020
-
激光雷达分类以及应用2017-09-19 8920
全部0条评论

快来发表一下你的评论吧 !
