

PLC控制/监控机器人的抓手状态的功能块FB250
描述
PLC控制/监控机器人的抓手状态的功能块FB250

选择维护位置
采用“维护”(Maintenance) 按钮(切换功能),可以选择维护位置或对其进行确认。到达维护位置时,其文本将从“维护”变成“维护确认”。
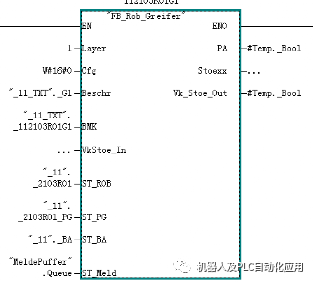
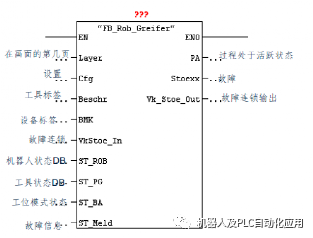
Beschr :工具标签:


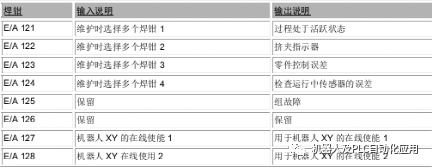
机器人反馈故障:
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夹爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件检查错误
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索传感器错误
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125总故障
注: 抓手的报警和别的工具不同,抓手的报警A122 ,A125,A121都是编辑在MAKRO342/MAKRO343里,零件检测A123, A124需要在程序里编辑.
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
什么是FB功能块?为什么要使用FB功能块?如何制作一个FB功能块?2023-11-09 7525
-
浅析机器人定位抓手的使用原则2023-10-31 1518
-
基本的速度控制功能块介绍2023-03-08 1695
-
功能块(FB)的结构介绍2023-02-17 6648
-
机器人定位抓手的使用原则2022-11-23 3099
-
调用功能块(FB或SFB)2022-04-20 5606
-
PLC控制/监控机器人抓手故障的编写2022-03-11 2459
-
西门子PLC FB41中PID功能块说明和调整方法2021-04-22 2184
-
控制KUKA安全机器人的PLC标准功能块FB 2922020-12-23 4196
-
西门子PLC编程功能块FB和功能FC的不同之处是什么2020-12-02 3039
-
西门子PLC的功能和功能块2020-11-09 4325
-
PLC控制焊接机器人的标准块汇总2020-06-30 3972
-
智能监控机器人该怎么设计?2019-10-14 4468
-
研华推出专为批次控制设计的功能块2011-09-20 1123
全部0条评论

快来发表一下你的评论吧 !
