

A6伺服操作小妙招您必须掌握!
电子说
描述
本次速成班为大家带来了3个松下A6何服异常排除小妙招,只需10分钟,您即可成为精通操作的“大神”。
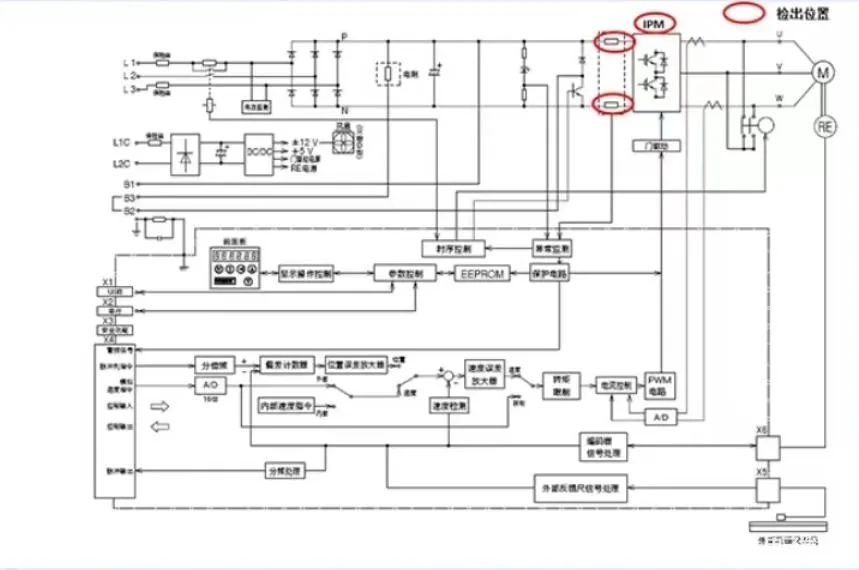
驱动器在使用过程中出现Err14.1IPM异常保护,应该怎么办呢?
这个问题提的很好,出现ERR14.1IPM异常保护,通常是因为驱动电机的IPM(智能功率模块)内的过电流检出异常。这时,我们应该这样处理:
1、确认电机的UVW是否正确连接。2、是否发生最大转矩→通过前面板的 "d04_trq" 进行确认→若是最大转矩(通常300%),降低加减速或者负载使其不出现最大转矩。
3、小输出时,测量相的线间电阻,确认是否不平衡。→若不平衡,需更换电机。(大功率由于卷线电阻在1Q以下,难以判断)4、确认电机的接地,测U、V、W与地线之间的电阻。→若无限大,需更换电机。
5、若通过以上方法并未得到改善,不能确认原因是什么,拆下电机的电源线,开启伺服,稍微转动电机轴。→若发生了Err14.1,很有可能是驱动器损坏。→若不发生Err14.1,很有可能是电机线的接地、电机线的接触不良、电机自身故障。
出现Err24.0位置偏差过大保护时,又该怎样处理呢?
这种情况是位置偏差脉冲超过Pr0.14(位置偏差过大设定)的设定时发生异常引起的。只需按照下面步骤操作,就可以解决啦!
1、电机未能跟随指令进行动作。指令位置偏差可通过驱动器前面板的 "d00_uEP" 的监视模式或者PANATERM监视功能的 [指令位置偏差] 、波形曲线进行确认。确认转矩是否饱和,转矩指令值可通过驱动器前面板"d04_trq" 的监视模式或者PANATERM监视功能的 [转矩指令] 、波形曲线进行确认。偏差大,转矩指令值不饱和时,需调整增益。使用转矩限制,若指令转矩被限制,试着将Pr0.13(第1转矩限制)、Pr5.22(第1转矩限制)的设定值变更到转矩指令值所容许的范围内。若转矩饱和的情况下,加长加减速时间,减轻负载,降低速度后进行确认。
2、Pr0.14(位置偏差过大设定)的值小。若设备的规格无问题, 则将Pr0.14(位置偏差过大设定)的设定值加大。
如果出现Err38.0驱动禁止输入保护,是不是也有办法解决呢?
那当然啦,出现这种异常的原因是Pr5.04 [驱动禁止输入设定]=0时,正方向/负方向驱动禁止输入(POT/NOT)都为ON。Pr5.04=2时,正方向/负方向驱动器禁止输入其中一个为ON。解决方案其实非常简单:
确认连接到正方向/负方向驱动禁止输入的开关、电线、电源、连接部是否异常。特别确认控制用信号电源(DC12~24V)启动是否延迟。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 驱动器
-
松下A6伺服通信协议介绍2026-03-02 1074
-
A6伺服操作小妙招2024-01-02 1848
-
A6伺服系统的接线与调试2023-01-12 6515
-
苏州回收松下A5/A6系列伺服放大器伺服电机以及plc模块2021-10-26 896
-
请问松下A6伺服驱动器如何通过modbus进行RS232通讯?2021-10-13 2879
-
松下A6伺服,回收松下 :A4-A5 II系列 100W,200W,400,750W等伺服电机驱动器2021-10-12 437
-
1214C系列PLC是如何连接松下A6伺服驱动器的2021-10-09 2657
-
松下A6驱动器维修2021-09-17 1181
-
松下A6伺服驱动器通过modbus进行RS232通讯案例2021-06-28 5671
-
高价回收安川伺服驱动器,松下A6系列伺服驱动器2021-04-15 418
-
GSM A6无线模块2017-05-04 3911
-
易+A6多功能温控器,智能享受,您的选择2016-05-23 3172
-
您必须掌握的电脑病毒知识汇集2010-02-11 972
全部0条评论

快来发表一下你的评论吧 !
