

对比恩智浦全系列MCU的GPIO电平中断设计差异
描述
大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家介绍的是恩智浦全系列MCU(包含Kinetis, LPC, i.MXRT, MCX)的GPIO电平中断设计差异。
在痞子衡旧文 《以i.MXRT1xxx的GPIO模块为例谈谈中断处理函数(IRQHandler)的标准流程》里,痞子衡主要介绍得是 GPIO 一般控制以及最常用的输入边沿中断相关知识。最近恩智浦官方社区有用户反映 i.MXRT1060 上 GPIO 中断状态寄存器(GPIO->ISR)在发生有效电平中断后的置位并不需要手动清零(W1C),其会在 I/O 输入电平状态切换后自动清零,这和手册里描述不一致。
首先在痞子衡的认知里 GPIO 输入电平中断没有什么具体应用场景,想象一下,如果 GPIO 中断事件由输入电平值来触发,如果发生了有效输入电平且其状态不改变,那么 GPIO 中断响应函数就会被不断重复执行(此时 CPU 时间片无法再分给主函数),什么样的任务需要这样的处理呢?暂且不论应用场景,痞子衡今天就从恩智浦全系列 MCU 这方面的行为角度来做一下对比吧。
一、I/O中断控制模块差异
恩智浦现有的经典 Arm Cortex-M MCU 产品线共有如下五大类,它们在 GPIO 一般控制和中断控制外设上是有差异的。首先 i.MXRT四位数/Kinetis/LPC 这三条线各自是完全不同的外设,然后 i.MXRT三位数是在 LPC 外设基础上做了增强,而最新的 MCX 系列则是组合了 Kinetis 和 LPC 外设。
| 芯片系列 | I/O一般控制 | I/O中断控制 |
|---|---|---|
| Kinetis | GPIO type1 | PORT |
| LPC | GPIO type2 | PINT |
| i.MXRT四位数 | GPIO type3 | GPIO type3 |
| i.MXRT三位数 | GPIO type2 |
GPIO type2(增加interrupt A/B) PINT |
| MCX | GPIO type1 |
GPIO type1(集成Kinetis PORT) PINT |
二、不同系列MCU下测试结果
根据上一节外设情况我们知道,只要测试了 i.MXRT四位数/Kinetis/LPC 这三个系列的情况,剩下两个系列自然也就不用测试了。
2.1 Kinetis
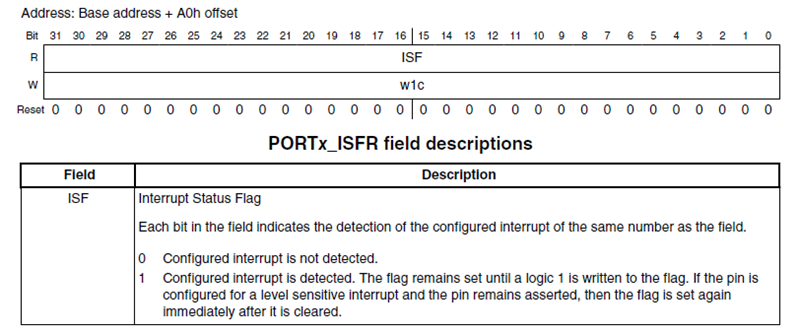
Kinetis 系列分为 K/KL/KE/KS/KW/KV/KM/K32L 等若干子系列,但是它们关于 GPIO 中断设计这一块是一样的。痞子衡选取了 MKL03Z 这颗芯片来做的测试,查看其手册 PORTx->PCRn[ISF] 位或者 PORTx->ISFR 寄存器均标记了中断状态,并且标明了需要做 W1C 操作。
我们可以直接在 SDK_2.3.1_FRDM-KL03Zoardsfrdmkl03zdriver_examplesgpioinput_interrupt 例程上做测试,只需要做简单修改,痞子衡摘取了主要代码如下。FRDM-KL03Z 板上 SW3 按键对应 PTB5 引脚(按下为低电平,松开为高电平),代码设计里按一次 SW3 便打印一次。测试结果来看,在 Kinetis 上即使是电平中断,PORTx->ISFR 寄存器也是必须要手动清零的,与手册描述一致。
| IRQ函数中是否清零Flag | SW3动作 | IRQ执行情况 | 打印输出结果 |
|---|---|---|---|
| 是 | 上电默认松开(高电平) | IRQ函数未触发 | 无 |
| SW3按下(低电平) | IRQ函数重复执行 | 无 | |
| SW3松开(高电平) | IRQ函数不再触发 | 出现一次打印 | |
| 否 | 上电默认松开(高电平) | IRQ函数未触发 | 无 |
| SW3按下(低电平) | IRQ函数重复执行 | 无 | |
| SW3松开(高电平) | IRQ函数重复执行 | 无 |
volatile bool g_ButtonPress = false;
void PORTB_IRQHandler(void)
{
// 清除中断标志
PORTB->ISFR = 1U << 5U;
g_ButtonPress = true;
}
int main(void)
{
// 省略 PTB5 引脚的 PINMUX 配置
gpio_pin_config_t sw_config = {
kGPIO_DigitalInput, 0,
};
// 仅需此处修改:将 GPIO 中断模式改为低电平触发
PORT_SetPinInterruptConfig(PORTB, 5U, kPORT_InterruptLogicZero);
NVIC_EnableIRQ(PORTB_IRQn);
GPIO_PinInit(GPIOB, 5U, &sw_config);
while (1)
{
if (g_ButtonPress)
{
delay();
PRINTF(" %s is pressed
", "SW3");
g_ButtonPress = false;
}
}
}
2.2 i.MXRT四位数
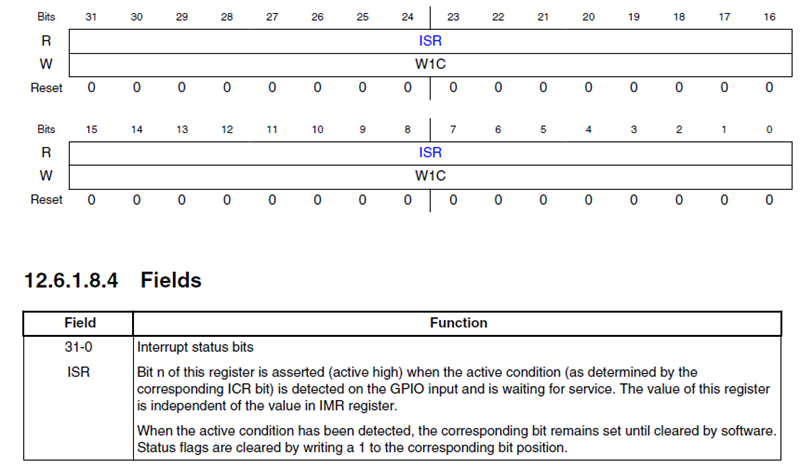
i.MXRT四位数系列分为 RT1010/1015/1020/1040/1050/1060/1160/1170/1180 等若干子型号,但是它们关于 GPIO 中断设计是一样的。痞子衡选取了 i.MXRT1062 这颗芯片来做的测试,查看其手册 GPIOx->ISR 寄存器标记了中断状态,同样标明了需要做 W1C 操作。
我们可以直接在 SDK_2_12_1_EVK-MIMXRT1060oardsevkmimxrt1060driver_examplesgpioinput_interrupt 例程上做测试,只需要做简单修改,主要代码如下。MIMXRT1060-EVK 板上 SW8 按键对应 WAKEUP_GPIO5[0] 引脚(按下为低电平,松开为高电平),代码设计里按一次 SW8 便打印一次。测试结果来看,在 i.MXRT 四位数上如果是电平中断,GPIOx->ISR 寄存器会在电平状态切换时自动清零,跟手册描述有点差异,不过这样的设计比 Kinetis 上看起来更合理。
| IRQ函数中是否清零Flag | SW8动作 | IRQ执行情况 | 打印输出结果 |
|---|---|---|---|
| 是/否 | 上电默认松开(高电平) | IRQ函数未触发 | 无 |
| SW8按下(低电平) | IRQ函数重复执行 | 无 | |
| SW8松开(高电平) | IRQ函数不再触发 | 出现一次打印 |
volatile bool g_InputSignal = false;
void GPIO5_Combined_0_15_IRQHandler(void)
{
// 清除中断标志
GPIO5->ISR = 1U << 0U;
g_InputSignal = true;
__DSB();
}
int main(void)
{
// 省略 WAKEUP 引脚的 PINMUX 配置
gpio_pin_config_t sw_config = {
kGPIO_DigitalInput,
0,
kGPIO_IntLowLevel, // 仅需此处修改:将 GPIO 中断模式改为低电平触发
};
GPIO_PortEnableInterrupts(GPIO5, 1U << 0U);
NVIC_EnableIRQ(GPIO5_Combined_0_15_IRQn);
GPIO_PinInit(GPIO5, 0U, &sw_config);
while (1)
{
if (g_InputSignal)
{
delay();
PRINTF(" %s is turned on.
", "SW8");
g_InputSignal = false;
}
}
}
2.3 LPC
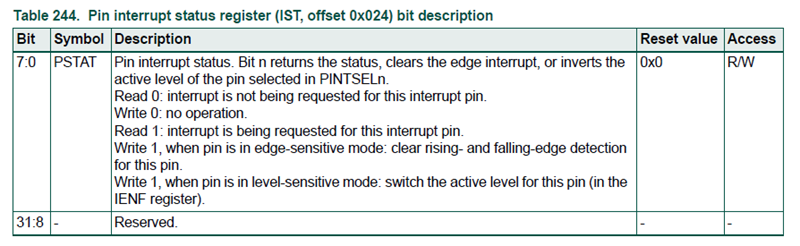
LPC系列分为 800/1x00/4000/4300/51Uxx/54000/5500 等若干子型号,但是它们关于 GPIO 中断设计是一样的。痞子衡选取了 LPC54114 这颗芯片来做的测试,查看其手册 PINT->IST 寄存器标记了中断状态,这里关于 W1C 操作做了边沿方式和电平方式的区别,其中对于电平方式,W1C 是切换有效电平逻辑。
我们可以直接在 SDK_2_9_0_LPCXpresso54114oardslpcxpresso54114driver_examplespintpin_interrupt 例程上做测试,只需要做简单修改,主要代码如下。LPCXpresso-54114 板上 SW1 按键对应 PIO0[24] 引脚(按下为低电平,松开为高电平),代码设计里按一次 SW1 便打印一次。测试结果来看,在 LPC 上如果是电平中断,PINT->IST 寄存器会在电平状态切换时自动清零,跟手册描述有点差异,并且中断处理函数里如果主动加上 W1C 操作其效果就变成了双边沿中断,这样的设计比 i.MXRT 四位数更进了一步。
| IRQ函数中是否清零Flag | SW1动作 | IRQ执行情况 | 打印输出结果 |
|---|---|---|---|
| 否 | 上电默认松开(高电平) | IRQ函数未触发 | 无 |
| SW1按下(低电平) | IRQ函数重复执行 | 无 | |
| SW1松开(高电平) | IRQ函数不再触发 | 出现一次打印 | |
| 是 | 上电默认松开(高电平) | IRQ函数未触发 | 无 |
| SW1按下(低电平) | IRQ函数执行一次 | 出现一次打印 | |
| SW1松开(高电平) | IRQ函数执行一次 | 出现一次打印 |
volatile bool g_ButtonPress = false;
void PIN_INT0_DriverIRQHandler(void)
{
uint32_t pmstatus = PINT_PatternMatchResetDetectLogic(PINT);
if (s_pintCallback[kPINT_PinInt0] != NULL)
{
s_pintCallback[kPINT_PinInt0](kPINT_PinInt0, pmstatus);
}
// 清除中断标志
PINT->IST = (1UL << (uint32_t)kPINT_PinInt0);
__DSB();
}
void pint_intr_callback(pint_pin_int_t pintr, uint32_t pmatch_status)
{
g_ButtonPress = true;
}
int main(void)
{
INPUTMUX_Init(INPUTMUX);
INPUTMUX_AttachSignal(INPUTMUX, kPINT_PinInt0, kINPUTMUX_GpioPort0Pin24ToPintsel);
PINT_Init(PINT);
// 仅需此处修改:将 GPIO 中断模式改为低电平触发
PINT_PinInterruptConfig(PINT, kPINT_PinInt0, kPINT_PinIntEnableLowLevel, pint_intr_callback);
PINT_EnableCallbackByIndex(PINT, kPINT_PinInt0);
while (1)
{
if (g_ButtonPress)
{
delay();
PRINTF(" %s Pin Interrupt event detected
", "SW1");
g_ButtonPress = false;
}
}
}
至此,恩智浦全系列MCU的GPIO电平中断设计差异痞子衡便介绍完毕了,掌声在哪里~~~
-
恩智浦MCX E系列5V MCU发布2025-08-16 5591
-
恩智浦MCX L系列MCU的低功耗设计2025-02-14 5055
-
恩智浦MCX L系列超低功耗MCU概述2025-01-17 3330
-
基于恩智浦MCX N系列MCU的应用示例2024-10-25 3765
-
恩智浦MCX W系列无线MCU的独特魅力2024-08-27 3850
-
【上海】5月25日-基于恩智浦MCX N系列MCU结合RT-Thread的应用与实践 线下培训2024-05-13 2429
-
恩智浦发布新一代MCX A系列MCU2024-02-02 2700
-
恩智浦i.MXRT1xxx系列MCU的Serial NAND启动2023-08-21 968
-
ACH拉近您与恩智浦MCU专家的距离2023-08-17 1504
-
恩智浦经典LPC系列MCU内部Flash IAP驱动介绍2023-03-30 3241
-
恩智浦:安全的无线MCU是核心问题2023-01-30 1535
-
恩智浦i.MX RTxxx系列MCU的特性2021-11-04 1934
-
恩智浦无线MCU产品及方案介绍2017-10-16 4019
-
恩智浦ARM_MCU开发工具速选2016-12-15 850
全部0条评论

快来发表一下你的评论吧 !
