

简述MTI雷达的工作原理
电子说
描述
目标与雷达之间的相对速度产生了传播频率的多普勒频移。我们知道多普勒频移与目标的径向速度成正比。因此,对多普勒频率的测量提供了一种测量径向速度的方法,该方法比其他方法更准确。
多普勒频移用于雷达系统应用中,优点包括将想要的运动目标回波与那些固定目标分离开来,并提取目标的径向速度等信息。利用该特点的脉冲雷达被称作动目标指示雷达(MTI)或者脉冲多普勒雷达。
这两种雷达的物理原理是相同的,但是它们的工作模式有所区别。例如,MTI雷达使用的脉冲重复频率较低,利用延迟线消除器将动目标与静目标分离开来,因此测量得到模糊的多普勒速度和明确的测距。
脉冲多普勒雷达使用的脉冲重复频率较高,能够测量得到明确的多普勒速度,但是测距可以是模糊的或者明确的,多普勒信息是由距离门和多普勒滤波器提取的。
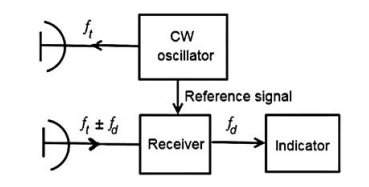
一个简单的连续波雷达由发射器、接收器、指示器以及发射和接收天线组成,如图1所示。一般而言,连续波雷达能够转换成脉冲雷达,如图2所示,增加一个功率放大器和一个脉冲调制器,通过开启和关闭放大器来产生脉冲。

此处没有本振,因为参考信号直接从CW振荡器转移到接收器,同时也作为检测多普勒频移的相干参考信号。相干的意思是发射信号的相位在参考信号中被保留了下来。这种参考信号是相干MTI雷达的显著特征。

接收到的回波信号与发射信号在接收器的混频器中混频,从而产生差分信号可表示为:


图3 (a)射频脉冲串;(b) 多普勒频率的视频脉冲串;(c) 多普勒频率的视频脉冲串
根据图4,可以看出,固定目标的回波信号的振幅不随扫描次数发生变化。但是,连续扫描时,移动目标的回波信号的振幅将发生变化。对于某次扫描,如图4(b),减去其上一次扫描的结果,如图4(c),从而可以消去固定目标的回波,只留下移动目标的回波信号,如图4(a)所示。

图4 MTI雷达的A型显示器显示的连续扫描信号
这种双极视频信号对于PPI来说是不够好的,因为在屏幕上,所有固定目标均显示为亮斑,移动目标显示为亮度波动的点。但我们实际需要的是与移动目标有关的多普勒信息。一种方法是从延迟线消除器中提取相关信息。延迟线消除器作为一个滤波器,能够消除固定目标引起的d-c分量,并通过移动目标引起的a-c分量。
在延迟线消除器中,两次连续扫描得到的回波信号彼此相减,如图5所示。在这种情况下,电流信号被延后了一个脉冲周期(脉冲重复频率的倒数),并从下一个信号中减去。两个通道的输出彼此相减,其结果也是双极的。通过全波整流器将其转换成单极视频信号。

图5 MTI雷达中延迟线消除器及相关作用
图2中,用来说明参考信号的简易MTI雷达框图不一定是最典型的MTI雷达。图6显示了另一种MTI雷达,包含由稳定本振控制的功放模块。相干MTI雷达的性能特点是发射信号与接收机中的参考信号必须是相位相干的。相干振荡器产生的相干参考信号的频率与接收机中的中频信号相同。

图6 带有功放发射器的相干MTI雷达
相干振荡器输出的频率需要与本振频率进行混合,因此其必须是一个稳定的本地振荡器,被称为稳定本振。中频信号由射频回波信号与稳定本振信号外差产生。稳定本振的作用是提供必要的频率变换,将中频变换至发射频率。
稳定本振可能产生的任何相位偏差在接收时都会被抵消,因为产生发射信号的稳定本振,也作为接收器中的本振。参考信号与变换到中频的回波信号都被注入到相位检波器。
-
一文解析MTI雷达(动目标指示雷达)2022-09-08 10364
-
一文解析UWB雷达的工作原理2022-11-29 8955
-
【共享】雷达信号检测(包括MTI,脉冲多普勒,CFAR处理)2013-11-02 26931
-
雷达信号检测程序,包括MTI,多普勒滤波器组,恒虚警处...2014-04-29 18638
-
数字式雷达信号处理器系统工作原理是什么?基本工作流程有哪些?2021-04-21 2083
-
雷达液位计的工作原理2008-01-07 11665
-
蓄电池工作原理简述2009-11-16 18893
-
《雷达信号处理》电子书籍.pdf2018-04-26 6543
-
雷达液位计的工作原理_雷达液位计的特点2019-08-07 12712
-
雷达液位计的工作原理_雷达液位计的主要优点2020-06-24 4558
-
基于FSK的多车道测速雷达原理简述2021-09-26 1471
-
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理2023-08-22 5064
-
脉冲雷达—MTI原理分析2023-09-08 3010
-
倒车雷达的工作原理2023-12-20 4037
-
激光雷达LIDAR基本工作原理2024-03-05 10051
全部0条评论

快来发表一下你的评论吧 !
