

什么是离线编程?
模拟技术
描述
什么是离线编程
随着机器人应用领域越来越广,传统的示教编程这种编程手段有些场合变得效率非常低下,于是离线编程应运而生,并且应用越来越普及。机器人离线编程,是指操作者在编程软件里构建整个机器人工作应用场景的三维虚拟环境,然后根据加工工艺等相关需求,进行一系列操作,自动生成机器人的运动轨迹,即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人执行程序传输给机器人。
离线编程的优势
减少机器人停机的时间,当对下一个任务进行编程时,机器人可仍在生产线上工作;
使编程者远离危险的工作环境,改善了编程环境;离线编程系统使用范围广,可以对各种机器人进行编程;像RobotMaster、HiperMOS、RobotWorks、InteRobot、RobotArt、RobMan都可以支持多种品牌工业机器人离线编程操作。包括ABB、KUKA、Fanuc、Yaskawa、Staubli以及国产品牌机器人等等;能方便地实现优化编程;像RobotMaster、HiperMOS、RobotArt这样的离线编程软件都可以进行一键优化轨迹;可对复杂任务进行编程;RobotMaster、HiperMOS能够基于CAD模型(Stp/Igs等格式)中的几何特征(关键点、轮廓线、平面、曲面等)自动生成轨迹;直观地观察机器人工作过程,判断包括超程、碰撞、奇异点、超工作空间等错误。(RobotMaster、HiperMOS等软件提供自动优化上述错误的功能)。
数字化产线设计及仿真平台Process Simulate的离线编程
在数字化产生设计及仿真平台里的离线编程可以实现很多功能,比如基础的显示隐藏命令、附着与拆除附着命令、抓取与释放命令等,复杂一些的如发送机器人的信号命令等。接下来我们简单讲解机器人切换工作坐标的离线编程命令。
原始的机器人工作坐标:右击机器人,点击机器人调整出现的坐标即为机器人的工作坐标:位置在其末端上
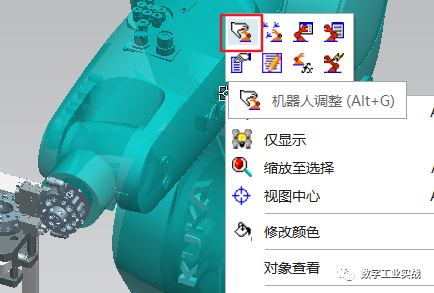

切换过程:首先机器人会到达红色框中的工具处

我们找到附着的位置之后,双击该位置的离线编程命令

如图所示添加Attach命令,Attach object即我们要附着的对象,我们把这个对象附着到机器人的控制器上,控制器即为To object的选项

接着机器人便把我们要用的工具附着上了

附着上工具的机器人,只是一个组件附着在机器人上,即这个组件随着机器人移动而移动,机器人的实际工作坐标还在原来设置的工作坐标上,并没有切换到该工具的工作坐标上,在机器人带动的工具到达它要拾取的零件之前的任何一个点位都可以切换其工作坐标,我们在其到达拾取零件的点位上添加切换工作坐标的离线编程命令Grip即拾取

如图所示,Gripper即我们要选择的握爪,attach object to frame 把对象附着至坐标,我们选择TCPF是该握爪的工作坐标,Drive gripper to pose 则为驱使设备(即该握爪)至一个姿态,我们选择刚好适合夹取的姿态

离线编程命令即变成这样:(零件附着即盒盖附着到盒身上)

完成之后,机器人便可以用握爪拾取零件:

好了,以上就是本次数字化产线设计及仿真平台ProcessSimulate里切换工具坐标的离线编程的干货分享了。
-
SAMSUNG离线编程视频教程2009-09-12 6729
-
贴片机离线编程2018-11-27 2498
-
Motoman机器人离线编程2021-09-07 2326
-
SAMSUNG完整的离线编程2009-10-06 1335
-
分析机器人离线编程误差来源2016-07-28 3548
-
浅谈机器人示教编程和离线编程的区别2016-08-31 3394
-
国内首款机器人离线编程软件RobotArt2017-01-06 10599
-
关于工业机器人离线编程与仿真软件的介绍2018-07-28 10793
-
浅析机器人离线编程软件的优势和主流编程软件的功能及优缺点2018-09-25 15389
-
工业机器人主流离线编程软件解析2019-01-01 4958
-
如何离线编程贴片机2018-12-19 3598
-
全球七大工业机器人离线编程软件大PK2019-05-13 10006
-
SMT贴片机的离线编程2020-03-09 6124
-
解析工业机器人的主流离线编程软件2020-12-26 2184
-
YAMAHA离线编程软件P-TOOL使用教程2023-06-29 28540
全部0条评论

快来发表一下你的评论吧 !
