

基于梯度倒数的无人机遥感图像融合滤波方法
电子说
描述
无人机遥感具有快速、低成本、高影像分辨率等优点,能够弥补卫星遥感不足、适用范围广泛。遥感图像是用于描述地表信息的重要数据源,但在图像采集过程中受传感器自身和大气环境等因素影响,使得遥感图像在采集、传输和存储过程中受到各类噪声的干扰。这对进一步处理、分析遥感图像中的有用信息十分不利。因此,为了获取清晰、高质量的遥感图像,对遥感图像进行一定的滤波去噪处理是十分必要的。
传统的遥感图像滤波方法灵活性较差,往往不能得到理想的去噪效果,不能很好地满足无人机遥感图像的去噪要求。这些问题对无人机遥感图像滤波去噪方法提出了更高的要求。基于此,本文提出一种基于梯度倒数的无人机遥感图像融合滤波方法,将梯度倒数与自适应开关均中值滤波融合设计新的滤波方法,并应用到遥感图像滤波处理中,提高图像的质量。
基于梯度倒数的无人机遥感图像融合滤波方法
结合梯度倒数与自适应开关均中值滤波提出了一种基于梯度倒的无人机遥感图像融合滤波方法———梯度倒数自适应开关均中值滤波,并将其应用到遥感图像滤波处理中。根据图像的连通性原理,相邻像素点的灰度值相近。对于n×n的平滑模板,分别计算出(x,y)与模板内其余像素点(x+i,y+j)之间的梯度值并设定阈值T。本文算法规定:若中心像素点周围至少存在一个像素点使得梯度值的绝对值小于等于T,则认为像素点f(x,y)不是由随机噪声引起。此时,采用传统的梯度倒数加权算法对其进行平滑;若模板内所有像素点的梯度值的绝对值都大于T,则认为像素点f(x,y)被随机噪声污染,此时根据自适应开关均中值方法对该像素点进行滤波处理。具体实现方法如下:
(1)选取n×n的模板,计算出模板内中心像素点(x,y)与邻近像素点(x+i,y+j)的梯度绝对值的导数并保存在g数组中。
(2)根据当前滤波点的 f ( x, y)灰度值, 设定阈值 T 的大小。其中 T 的取值满足 T =f(x, y)μ,μ为调整因子,本文取值为0.1。
(3)设置标志数组g′,用于标记模板内各点与中心点的梯度值是大于阈值 T。若超过,则置为1;否则置为0。为便于判断,标志数组中中心点( x,y)处的值也置为 1。
(4)如果当前像素点满足 g′(x,y) =1, 则采用自适应开关均中值滤波方法,如式(4)中所示。
此时,q(x,y)为当前模板内中心像素点(即噪声点)的输出;否则,按照文献所述方法对模板内各点进行处理,将q(x,y)作为非噪声点的输出,如式(5)所示。

(5)用滤波模板对整幅含噪图像进行遍历,重复步骤(2)步骤(4),如果滤波后像素的灰度值超出[0,1]范围,则将灰度值小于0的像素点置0,超出1的置1。
结果与分析
实验中选取了由无人机拍摄的大小为346×300的遥感图像。分别采用传统的梯度倒数加权平滑方法、开关均中值滤波方法、自适应开关均中值滤波方法、本文提出的基于梯度倒数的无人机遥感图像融合滤波方法对遥感图像进行滤波去噪处理,实验结果如图1和表1中所示。
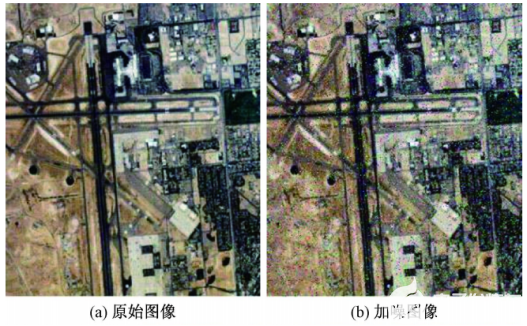
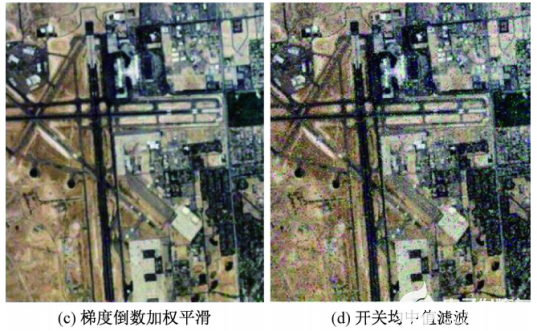

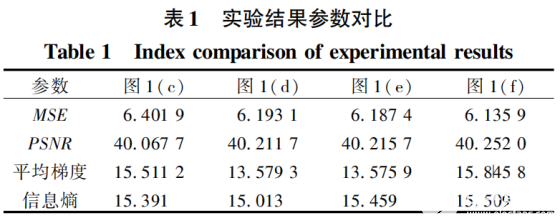
结合表 1,观察分析这几种方法的实验结果可以发现:对比图1(c)和图1(d),开关均中值滤波方法较传统的梯度倒数加权平滑方法去噪效果好,滤波后图像的峰值信噪比和信息熵均比较高,但图像的边缘保持效果比较差;对比图1(d)和图1(e),由于自适应开关均中值滤波方法的阈值会随着图像中局部区域受到噪声污染的程度自适应变化,因此滤波后 PSNR、MSE、信息熵等几项指标均有一定的提升;对比图1(f)和图1(c)、图1(d)、图1(e),可以看出本文提出的基于梯度倒数的无人机遥感图像融合滤波方法滤波后各项评价指标均优于其他传统对照方法,不仅可以较好地保持遥感图像的边缘细节信息,而且针对高斯噪声和脉冲噪声等不同类型的混合噪声有着显著的滤波去噪效果。
结论
针对现有无人机遥感图像滤波去噪处理时存在无法兼顾滤波效果与边缘细节保持效果的问题,本文提出了一种基于梯度倒数的无人机遥感图像融合滤波方法———梯度倒数自适应均中值滤波,根据实验结果得到以下结论。
(1)该方法结合了梯度倒数加权平滑方法和自适应开关均中值滤波方法的优点,在保证滤波效果的同时较好的保持了图像边缘等细节信息。
(2)从主观视觉方面,本文方法能够较好的滤除高斯、椒盐噪声等混合噪声,滤波效果明显。
从客观实验数据方面,使用本文方法滤波后图像的 MSE、PSNR、平均梯度、信息熵等参数均有一定幅度的提升,其中平均梯度提升了约3.5%,能够满足对遥感图像的滤波降噪处理要求。
欢迎关注公众号:莱森光学,了解更多光谱知识。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑 黄宇
-
知语云:低慢小无人机如何反制管制监测行为?方式方法又是什么?2023-11-20 4066
-
基于无人机高光谱遥感的森林可燃物分类方法研究-莱森光学2023-06-02 1904
-
无人机反制设备的原理是什么?2022-09-13 11755
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28952
-
无人机水质遥感监测方法2022-03-03 4157
-
基于图像分割的无人机遥感影像目标提取技术2021-06-29 1105
-
无人机遥感技术的特点及应用2017-10-12 1647
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11675
-
【秀秀资源】无人机相关资料合集2017-02-15 5405
-
高精度晶振是各大厂商无人机遥感技术大PK的关键2016-06-23 2808
-
无人机遥感技术2016-03-11 8164
-
无人机遥感系统的研究进展与应用前景2016-01-08 1237
-
无人机开发方案要领与电路图集锦2015-05-07 10498
-
基于压缩感知的遥感图像融合方法2012-04-18 934
全部0条评论

快来发表一下你的评论吧 !
