

尺寸、重量、功率和成本都低的多模式、多任务、软件定义毫米波雷达
描述
尺寸、重量、功率和成本都低的多模式、多任务、软件定义毫米波雷达
Erik Ojefors, Sivers Semiconductors AB;Peter Fox, aiRadar Inc.
一系列有源电子扫描相控阵(AESA)毫米波雷达被设计成具有多模式、多任务、软件定义雷达(SDR)的能力。这些研究用雷达针对各种市场,包括高级驾驶辅助系统(ADAS)、小型无人机(sUAV)探测和跟踪系统、sUAV空对空和空对地雷达以及sUAV机载合成孔径雷达(SAR)。这些雷达旨在促进雷达研究和开发,从早期阶段的操作概念到需求定义和验证,再到系统设计、验证和部署。
这些雷达由aiRadar公司设计和制造,收发模块(TRM)使用Sivers公司的高度集成、最先进的射频集成电路。它们可以在扇区扫描仪和单通干涉SAR(InSAR)之间无缝切换。扇区扫描仪覆盖90度方位角,角分辨率0.5度,垂直方向可以三基线干涉定位;InSAR部署在sUAV上,其距离和方位角分辨率优于5厘米和0.5度,生成数字表面模型(DSM),可进行多达16个通道的沿线干涉测量,用于高分辨率明晰移动目标指示(MTI)。
InSAR配置提供了多孔径SAR的能力,具有位移相位中心天线(DPCA)微导航功能。这些雷达的尺寸从最小的型号,质量为3850克,包括三个发射(Tx)和三个接收(Rx)的64单元阵列,到最大的型号,质量不到10公斤,包含1,536个有源元件的相同阵列布局的256单元阵列。
目标客户是商业、军事和学术研究人员,他们寻求使用符合IP-67和Mil-Std-810标准的坚固的可重配置的仪器来开发雷达最新技术。使用简单但功能强大的雷达编程语言(aiRPL)部署这些研究雷达,该语言在基于现场可编程门阵列的多模式雷达处理器(aiRPU)上执行,消除了与开发基于分析和仿真的AESA雷达系统相关的风险,无论是计算机仿真还是使用雷达目标仿真器进行空中验证。
一个ADAS开发商可能希望对不同阵列尺寸和具有虚拟或真实阵列单元的各种AESA配置进行实际操作比较。例如,这些研究雷达允许将2Tx和4Rx MIMO阵列与12Tx和16Rx MIMO阵列进行直接同地和同时间的比较。同样,12Tx和16Rx MIMO阵列(有192个虚拟通道)可以与256Tx和512Rx阵列(有512个真实通道)进行比较。aiRPL中的一个简单脚本可以管理这种复杂性,使这三种(或更多的雷达配置)在PRI-to-PRI基础上循环,提供相同操作条件下的雷达性能的客观比较。
一旦特定应用的要求和AESA配置得到验证,商业、军事或学术雷达开发商可根据风险评估、经济性或上市时间的紧迫性,进行内部雷达设计或由aiRadar定制雷达。这可以通过或不通过aiRadar编程语言编译器和雷达处理器IP核的授权来完成。
aiRPU IP核提供实时双向接口,最高可达48Gbps,与最低级别的同相和正交原始雷达数据通道,以及aiRPU IP核相连。这个接口是为认知自适应(CA)雷达的研究人员和开发人员提供的,允许外部人工智能(AI)处理器,也许是基于GPU阵列,在PRI-to-PRI基础上修改从发射脉冲到波束方向的任何或所有雷达配置。
一个例子是ADAS的自适应脉冲编码调制(PCM),在拥挤的雷达环境中,随着越来越多的雷达被部署在越来越先进的系统中,ADAS将存在这种情况。CA环路有助于分析接收到的信号,以确定是否存在干扰源(另一车辆),并选择PCM编码来拒绝该干扰。该CA环路在军事应用的低概率拦截(LPI)雷达中也有应用。CA物理和API接口的一个关键特征是,CA回路中的算法仍然是其开发者的独家知识产权。
为了便于发放实验和研究许可证,首次供应的研究雷达的中心频率为66GHz。研究雷达的结构是这样的:TRM的数字控制和射频接口能够利用Sivers现有的技术将硬件重新配置到24GHz,或者利用未来的技术重新配置到76-81GHz。通用的TRM接口预计会出现新分配的毫米波频段,如果它们出现的话。
ADAS
鉴于雷达传感器能够在雨、雾和雪等条件下工作,而这些条件会损害或使激光雷达传感器和视觉摄像机无法工作,因此,雷达一定会用于ADAS。
目前部署在汽车中的大多数雷达的分辨率非常低。虽然低分辨率的雷达能检测到一个物体、一辆摩托车、一个人或一辆卡车,但该物体显示的只是一个“圆球”而已。物体识别的任务在很大程度上被转移到人工智能/机器学习(ML)算法上。
这种功能的分配可能有几个原因,其中一个可能是需求定义和验证,设计和制造带有复杂AESA天线的先进现代雷达是很困难的。这种困难转化为技术、性能、进度和成本风险。低成本和低风险的先进AESA的出现可能会使这种分配发生变化,也许会使雷达自主性水平得到提高。
除了设计和制造复杂的先进AESA雷达外,验证和持续的产品保证也不是小事,需要有明确的指标。一个简单的要求,如综合旁瓣比(ISLR)影响到两个目标的角度分辨率和单个目标的角度测量精度,并对图像质量产生重大影响。这种分辨率和图像质量的缺乏可能会对AI/ML对场景的解释产生非常消极的影响。
军事和商业雷达系统
最近出现了越来越多的雷达应用,而目前的雷达在这些应用中表现不佳或不适合。这些应用包括用于探测和监测构成安全和军事威胁的小型无人机的真实孔径雷达(RAR),sUAV上使用的高分辨率成像SAR和/或RAR。
一个很好的例子是部署在洪水现场的InSAR,所需的产品是叠加在DSM上的高分辨率场景,在河岸和斜坡消退时实时捕获,用附加在这些物体上的速度矢量(MTI)识别感兴趣的物体。
SAR提供了极高的分辨率,但需要移动,而RAR从静止的位置提供了优秀的图像质量。部署有三维InSAR DSM的无人机SAR可能是高分辨率威胁和损害评估的首选仪器,而部署有AESA的无人机RAR可能更适合实时发现目标。
阵列结构和收发模块
在一个具有通用接口的单一硬件平台上用SDR实现多种应用、多种模式和多种任务,作为一种经济和实惠的解决方案是具有挑战性的。早期决定实施混合波束赋形结构,在16个天线单元的级别上采用模拟波束赋形,在更高级别上采用数字波束赋形,减少了ADC的数量和数据速率。
Sivers主要开发基于先进半导体技术的MMIC、模块和子系统,用于WiGig毫米波网络。其TRXBF01 RFIC被集成到一个模块中,该模块是具有16个Tx和16个Rx单元的阵列,覆盖了从57到71GHz的14GHz带宽。在90度水平扫描的AESA中,Sivers模块的每通道发射功率为+11dBm,接收噪声系数为7dB。图1显示了BFM01模块的正面。这些RFIC模块由评估套件支持。
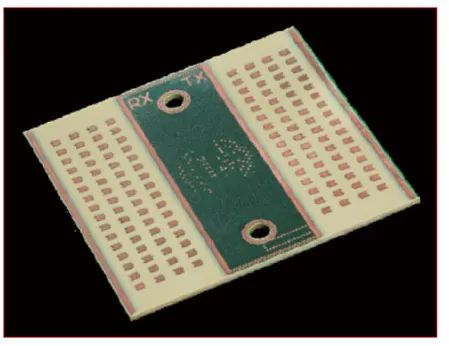
图1Sivers收发器的天线侧。
专门为aiRadar开发了一个定制的版本,带有用于相干多模块AESA的宽带宽调制的接口。BFM06012-RFM这个装置具有4GHz发射带宽的调制输入,能够实现5厘米的距离分辨率。垂直波束宽度经过渐变修正,产生30度的波束宽度,旁瓣水平低于-20dB。aiRadar已经将这些模块集成到研究雷达中,较小的RRI-100显示在图2中,较大的RRI-400显示在图3中。

图2RRI-100研究型雷达。
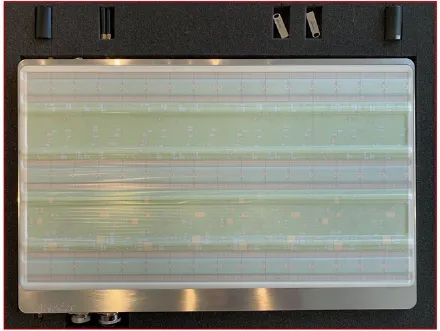
图3RRI-400研究型雷达。
在这两张图中,天线罩凹槽中可以看到Tx/Rx,一对在天线罩的顶部,一对在中间,一对在底部。从顶部到中间的间距与从中间到底部的间距
审核编辑 :李倩
-
探一探毫米波雷达技术的发展趋势2018-08-03 7673
-
毫米波雷达方案对比2018-08-04 12459
-
车载毫米波雷达的技术原理与发展2019-05-10 6168
-
车载毫米波雷达的原理是什么?2019-08-07 7615
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21247
-
【微信精选】成本低、功耗低,Aip封装技术如何让毫米波雷达替代超声波成为可能?2019-10-13 2884
-
毫米波雷达(一)2019-12-16 14955
-
毫米波应用的应用,四路毫米波空间功率合成技术介绍2020-11-05 3667
-
毫米波雷达的特点是什么2021-07-30 7360
-
智能安防领域雷达技术应用,毫米波雷达模组,存在感应雷达发展2021-08-24 2279
-
智能安防毫米波雷达感应模块,智慧传感雷达技术应用2021-09-15 1778
-
漫谈车载毫米波雷达历史2022-03-09 12052
-
毫米波雷达传感的成本解决方案2022-11-03 1587
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2279
-
了解毫米波 -- 之一2023-05-05 1559
全部0条评论

快来发表一下你的评论吧 !
