

PMM系列CANopen通信一体化伺服电机快速使用教程
描述
本教程适用于立迈胜PMM系列CANopen通信一体化伺服电机上位机连接调试。本文所用软件与说明书获取方式在文末处说明。
一、环境搭建
软件环境准备
1.安装NimStudio上位机调试软件,按照提示说明进行安装。
2.安装“USB转CAN转换器”驱动程序。
(参考《SCM-USBCAN-LB&SCM-USBCANI-LB 通信转换器产品使用说明书》进行转换器驱动的安装)
硬件环境准备
1.将“通信转接线(OUT)”一端接到伺服电机的IN端口上,另一端与“USB转CAN转换器”对接,“USB转CAN转换器”另一端插电脑USB接口。
2.电机直流供电(根据电机使用说明书,对应电机型号在额定范围内直流供电)。
下图为电机接线图(以60伺服电机举例)
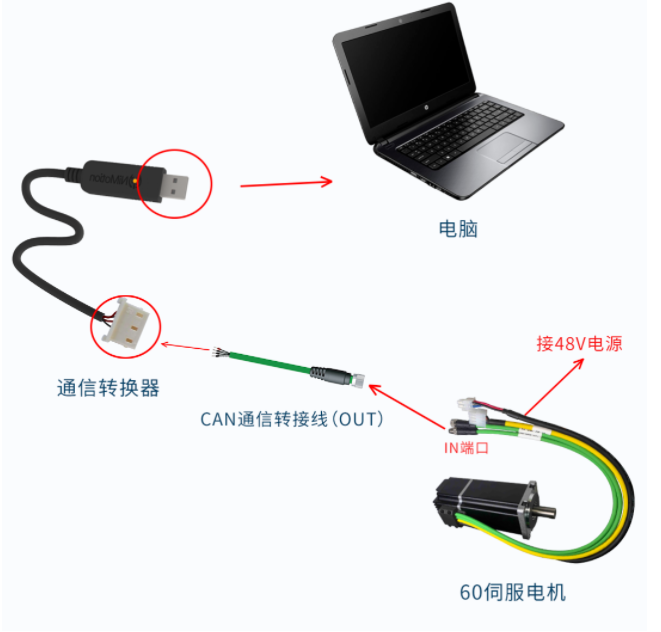
电机接线图
注意USB转换器端口与转接线散线端接线,各引脚定义如下:
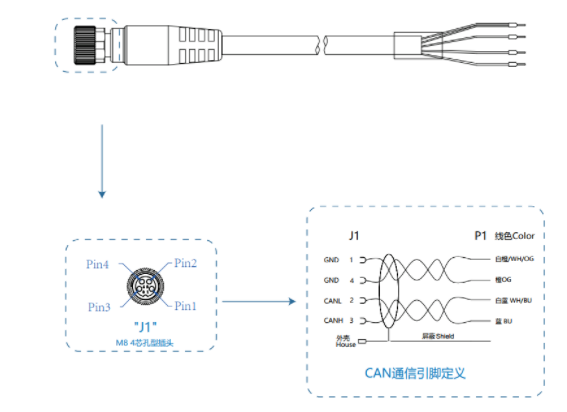
“通信转接线(OUT)”接线引脚定义

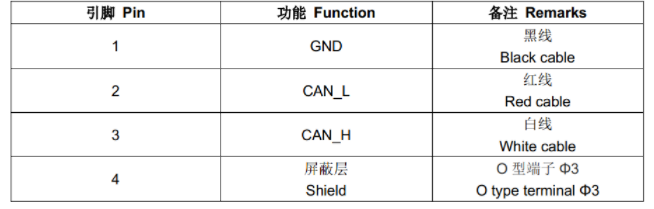
“USB转CAN转换器”引脚定义
二、建立通讯
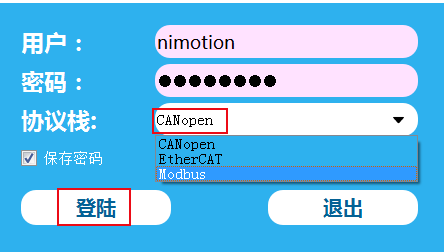
1.打开NiMStudio软件,选择“CANopen”通讯后点击“登录”,如下图所示。
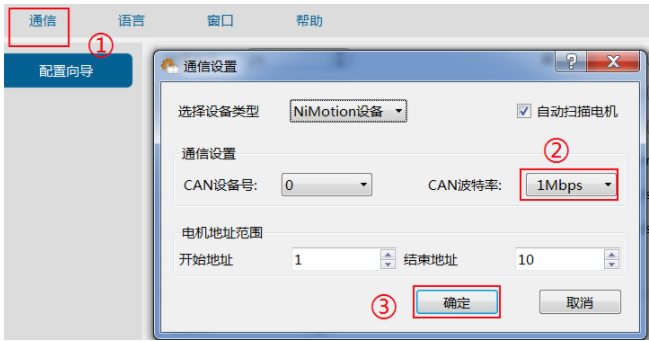
2.在软件界面左上角选择“通信”点击“打开”,波特率选择“1Mbps”(默认1Mbps),点击“确定”进入界面,如下图所示。
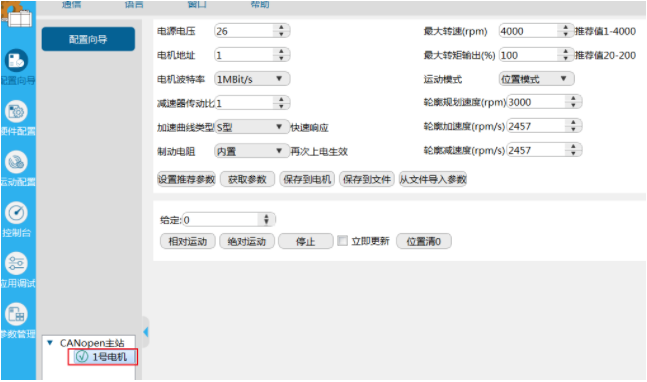
3.通信成功后的界面如下图,CANopen主站下会有电机出现,如下图中左下角的“1号电机”。
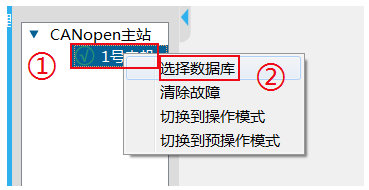
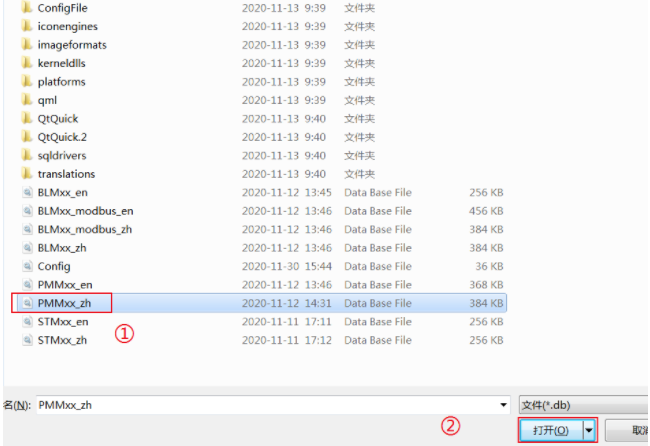
4、加载数据库,在1号电机处右击“选择数据库”后进入文件夹选中PMMxx_zh后点击打开。
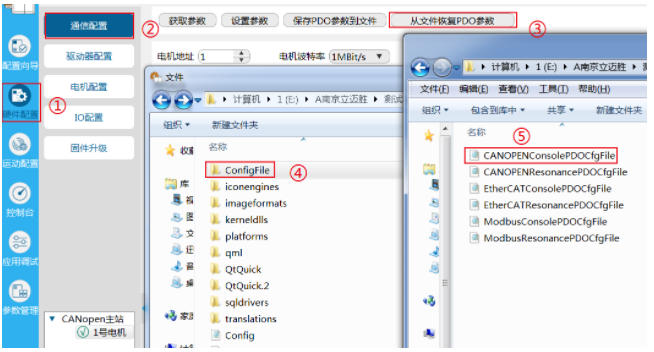
5、恢复PDO参数,在①硬件配置②通信配置③从文件中恢复PDO参数④ConfigFile中选择⑤CANOPENConsolePDOCfgFile并打开。
三、电机运行举例
轮廓位置模式运行
控制流程如下:
首先,
①点击“运动配置”
②点击“模式配置”
③选择“CIA402模式”
④选择“轮廓位置模式”
⑤点击“设置到该模式”,如下图所示

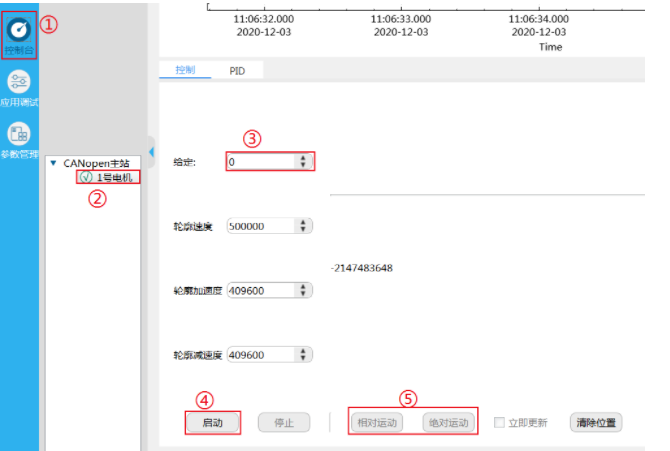
完成运动配置后,进行以下操作
①点击左侧“控制台”
②选中已显示的电机“1号电机”
③给定位置值
④点击“启动”
⑤选择“相对位置”或“绝对位置”运行,如下图所示
根据上面的流程操作,电机将按照给定位置运行。
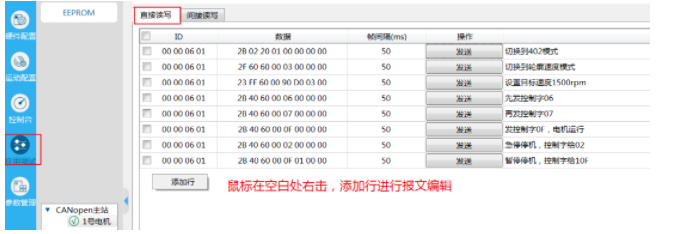
控制流程报文如下图所示。

轮廓速度模式运行
控制流程如下:
首先,
①点击“运动配置”
②点击“模式配置”
③选择“CIA402模式”
④选择“轮廓速度模式”
⑤点击“设置到该模式”,如下图所示

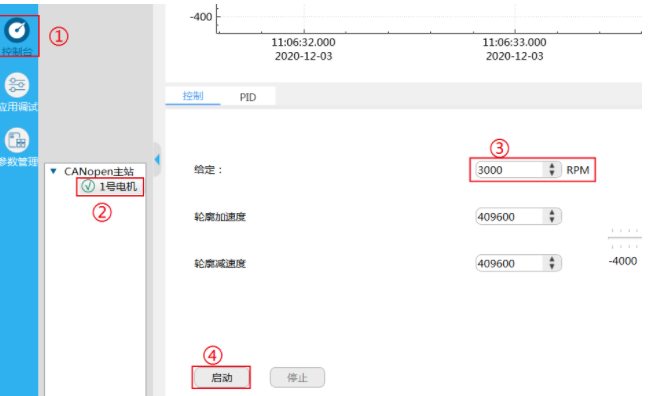
完成运动配置后,进行以下操作
①点击左侧“控制台”
②选中已显示的电机“1号电机”
③给定速度值
④点击“启动”,如下图所示
根据上面的流程操作,电机将按照给定速度运行。
控制流程报文如下图所示。
四、补充说明
1.NiMStudio软件左上角“帮助”里有软件详细介绍。

2.NiMStudio软件左上角“窗口”下拉选项“数据列表”,可查看实时报文。

3、电机应用详细介绍可参照《PMM 系列 EtherCAT&CANopen 通信一体化低压伺服电机使用说明书》及《一体化低压伺服电机 CANopen 通讯用户手册》。
-
STM系列CANopen通信一体化步进电机电机快速使用教程2023-02-09 4544
-
PMM一体化伺服电机的主要特点有哪些2021-10-08 1591
-
一体化伺服电机刹车电机有多少伏供电2021-09-01 1371
-
一体化伺服电机IO线端子对应定义是什么2021-07-05 1863
-
一体化伺服电机报警信息在哪个参数里面查看?2021-06-28 1565
全部0条评论

快来发表一下你的评论吧 !
