

伺服控制中常见的基本概念-2
描述
传统伺服电机应连接图
==

立迈胜一体化伺服电机连接示意图

PMM系列一体化伺服电机主要特点:
1.模块化高集成度设计,快速布置现场和安装,省去驱动器和电机之间匹配过程,降低了现场总线的成本,减少了使用成本。
2.通过EtherCAT/CANOpen协议(DS402)与控制器相连,每个节点直接使用硬件实现运算,无需软件参与,大幅缩短报文延迟时间。传输速率:2x100Mbps(全双工)一个伺服轴的硬件延时只有1us。
3.控制精度达到±1rpm和±1pulse,1ms的实时响应周期,具有优异的控制性能及良好的定位精度。
更多关于一体化伺服电机查看
。
常见名词解释
工作区 operating area
工作区用转速和转矩组成的二维平面坐标表示(见下图)。
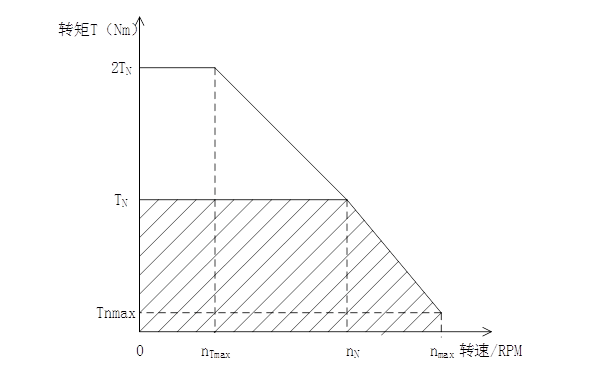
图中:
2TN—2倍额定转矩(峰值堵转转矩);TN—额定转矩;Tnmax—最大转速下的最大转矩;nTmax—2倍额定转矩下的最大转速;nN—额定转速;nmax—电机的最大转速;
电机温升不超过规定值,能长期工作的区域为连续工作区。上图中阴影部分为连续工作区,超出连续工作区,允许电机短时过载运行的区域为断续工作区。
直流母线电压 DC bus voltage
交流伺服驱动器逆变器输入端的直流电压(即电源电压48V或24V);
额定功率 rated power
在连续工作区内,电机所输出的最大功率。
额定转速 rated speed
在连续工作区内,电机额定功率点的转速。
额定转矩 rated torque
电机在额定功率和额定转速下的输出扭矩。
转矩常数 torque constant
在规定条件下,电机通入单位线电流时所产生的平均电磁转矩。
反电动势常数 back EMF constant
在规定条件下,电机电枢绕组开路时,单位角速度在电枢绕组中所产生的线感应电动势。对方波驱动电机反电动势为峰值,对正弦波驱动电机反电动势为有效值。
理想情况下,当采用国际单位时,转矩常数Kt和反电动势常数Ke有如下关系:
对方波驱动电机,Kt=Ke;
对正弦波驱动电机,Kt=√3Ke;
静摩擦力矩 static friction torque
电机绕组开路时,使转子在任意位置开始转动需克服的阻力矩。
电机热阻 thermal resistance of motor
从电机内的热源(绕组、铁心等)到冷却介质之间对热流的阻抗。
电感 inductance
电机两相线间的电感。
直轴电感 inductance of d-axis(direct axis)
当定子旋转磁场的轴线与转子直轴重合时定子所表现的电感。
交轴电感 inductance of q-axis(quadrature axis)
当定子旋转磁场的轴线与转子交轴重合时定子所表现的电感。
电气时间常数 electrical time constant
在阶跃输入电压和规定条件下,堵转电机使绕组电流达到其最终值的63.2%所需时间。
热时间常数 thermal time constant
在恒定功耗和规定条件下,电机绕组温升达到稳定值的63.2%所需时间。
最高允许转速 maximum permitted speed
在保证电气绝缘介电强度和机械强度条件下,电机最大设计转速。
等效转矩 r.m.s torque
非恒转矩应用中,一个完整工作循环中转矩的均方根值,其计算如下:
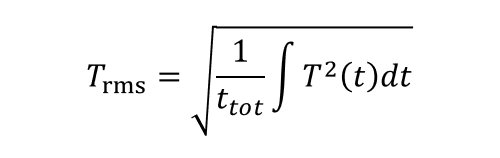
或近似计算:
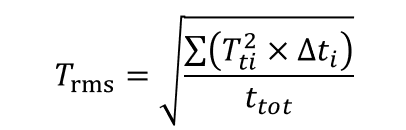
式中:Trms ----------等效转矩;T(t)------------转矩对时间t的函数Tti-------------Δti内的转矩值Δti-------------转矩Tti的持续时间Ttot------------一个完整工作循环的时间
讲到这里,大家是否对这些专业术语有一个更深的了解呢?关注“立迈胜”公众号,精彩不断,收获满满!
-
Fpga Cpld的基本概念2012-08-20 3013
-
阻抗控制相关的基本概念2021-02-25 2338
-
控制总线中常见的控制信号包括哪些2021-08-11 5134
-
FOC控制的基本概念2021-09-07 2319
-
伺服与变频的基本概念2021-09-09 1218
-
AGV的基本概念及基本结构组成2021-09-14 3071
-
介绍开发者在ESP8266开发中常见的一些问题2021-11-10 1059
-
Menu软件体系结构的基本概念2021-12-17 1092
-
VMA和LMA的基本概念简介与常见问题解析2022-03-09 4562
-
PPP协议的基本概念2009-06-24 1538
-
伺服控制中常见的基本概念2023-02-09 2259
-
伺服驱动系统的基本概念和工作原理2023-03-06 5692
-
理解STM32控制中常见的PID算法2023-10-17 3719
-
伺服电机应用中常见干扰类型和产生途径2024-01-07 2762
-
伺服系统基本概念和与变频的关系2024-08-27 1932
全部0条评论

快来发表一下你的评论吧 !
