

利用TDMoP器件支持FDL网络环回
描述
本应用笔记介绍如何利用Maxim的TDM-over-Packet (TDMoP)芯片为FDL (数据连接设备)提供网络环回支持。本文重点关注TDMoP产品线,DS34T10x代表了多款器件,具体指:DS34T108、DS34T104、DS34T102、DS34T101。
引言
在许多应用中,系统管理员需要操作支持系统(OSS),控制、管理网络设备。使用OSS,管理员可以发出命令给“测试探头”,启用或关闭FDL网络环回。本应用笔记介绍了如何使用DS34T10x系列TDMoP器件,实现这些FDL命令。
FDL环回命令功能
典型应用中,FDL环回命令在测试部分产生(图1)。
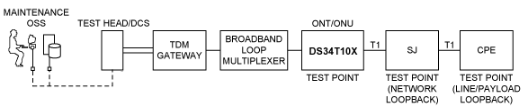
图1. FDL在测试部分启用或关闭环回测试
测试探头作为系统维护的一部分,每当接到一个TDM线路故障报告,FDL环回可以作为一种诊断工具,定位故障发生的位置。传统的T1网络,TDM线路连接在测试探头,可发送环回命令,评估结果。
网络正常运行时,TDM流量终止在客户端设备(CPE)。考虑图1所示网络,当检测到网络故障时,网络将置于维护模式;从OSS发出的命令通过TDM网关,然后经过ONU或ONT。这个例子中,TDM网关支持电路仿真业务(CES),这意味着TDM网关是CES伪线终点。所有CES通道终止在TDM网关,ONT或ONU也可以是GPON,因此,GPON传输到此结束。这种情况下,TDM网关要求ONU终止GPON业务及CES业务传输。图1中,ONU采用Maxim的TDMoP芯片实现。图中可以看到一个接线器(SJ),通常在许多传统的PDH网络都会用到。
内部硬件连接
为了实现GR-312-CORE标准定义的网络环回,两个FDL命令是必需的。
开启网络环回(00010010 11111111),这个位命令和响应信息在ESF数据链传送,将把SJ置于维护状态,并对收到的T1数据进行环回。发送环回启动消息时,SJ一直保持在维护状态。TDMoP器件将监测第9位至第14位(001001)数据,以执行环回命令。
关闭网络环回(00100100 11111111),这个位命令和响应信息在ESF数据链路传送,将把连接器置于正常工作状态,相当一个T1中继。连接器在传送环回禁止命令器件保持正常状态。TDMoP将监测第9位至第14位(001001),以执行环回禁止命令。
这些环路的开启和关闭命令可通过DS34T10x芯片实现,
图2
给出了DS34T10x LIU和成帧器的硬件连接。
为了实现环回开启和关闭,每个T1端口需要一个额外的T1成帧器。如图2所示,如果在网络中实现两个T1端口环回,那么就需要两个额外的T1成帧器构成帧环回(FLB)。这个例子中使用一片DS34T104,内置4个T1端口(两个用于所需的T1端口,两个用于FDL环回)。如果需要8个T1端口,可用DS26401提供另外8个成帧器。这些额外的成帧器用于连接原来的成帧器;这些成帧器仅用于环回开启和关闭操作。图2中,一片DS34T104用于实现两个T1端口的TDMoP“绑订”,并提供环回支持。
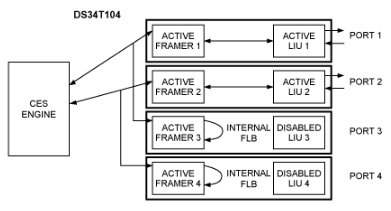
图2. DS34T104在支持环回开启和关闭的示例
图2中,成帧器3并联成帧器1,成帧器4并联成帧器2。需预先配置好,然后才能发送FDL开启和关闭代码。可联系Maxim申请驱动程序和配置文件。
为了验证此配置,配置FMRTOPISM4寄存器如下:
设置FMRTOPISM4.FRMR3 = 000,因此FRMR3源自FRM1
设置FMRTOPISM4.FRMR4 = 001,因此FRMR4源自FRM2
由于FDL只能工作在T1的ESF成帧模式,端口3和4应该配置如下:
设置TCR3.TFM = 0
设置RCR1.RFM = 0
接下来,通过控制寄存器1把芯片配置成透明传输模式。
TCR1 = 64h或60h,取决于是否需要B8ZS码
然后通过接收控制寄存器3,把成帧器3和成帧器4配置为帧环回。
RCR3.FLB = 1,成帧器3和4
对于端口3和端口4接收的BOC,可通过RBOC寄存器设置为一串监测码N (N = 1,3,5或7):
RBOC[2:1] = 00:第1组连续BOC码,识别有效序列
RBOC[2:1] = 01:第3组连续BOC码,识别有效序列
RBOC[2:1] = 10:第5组连续BOC码,识别有效序列
RBOC[2:1] = 11:第7组连续BOC码,识别有效序列
检测到一个有效BOC事件(如前所示,通过设置RLS7.BD),RBOC消息需要从RBOC寄存器读取。然后基于RBOC消息,可通过LMCR寄存器设置环回。
LMCR[2:0] = 010
Maxim提供的驱动程序在
_te1DrvCTRL
函数中包含这样一个命令代码,可用于发送任何BOC数据。
TE1DCTRL_T1403TXPKT
TE1DCTRL_T1403TXBOC
所有驱动器(包括内部和外部)的调用都可通过
agent.c
的一个简单API和
t1e1_interface.c
文件。
一个BOC码发送请求可以按照下列格式:
// Call the driver's transmit BOC function
retval &= (*lnPtr->drvCtrl)(DRVREF, TE1DCTRL_T1403TXBOC, ENABLE, (INT)BOC_CODE);
一个BOC码停止发送请求可以按照下列格式:
// Call the driver's transmit BOC function
retval &= (*lnPtr->drvCtrl)(DRVREF, TE1DCTRL_T1403TXBOC, DISABLE, NULL);
结论
ONU设备要求要支持FDL网络环回的启动/关闭命令。DS34T10x系列的TDMoP芯片支持模拟环回,能够实现这一功能。当BOC收到一个有效的环回命令时,可使能模拟回环;同样,也可解除环回。DS34T10x的这个功能是采用DS34T10x设计的ONU,不需要内部开关。
审核编辑:郭婷
-
dTSEC是否支持远程MAC环回?2023-04-23 545
-
如何在TDMoP产品上使用抖动缓冲器来补偿数据包延迟变化2023-03-08 2273
-
为Maxim的TDMoP器件筛选振荡器2023-02-14 1356
-
使用TDMoP器件的FDL网络环回支持2023-02-07 1804
-
使用 TDMoP 设备的 FDL 网络环回支持2022-11-17 313
-
如何使用TDMoP器件实现FDL命令2020-12-03 1142
-
利用Maxim的TDMoP芯片支持FDL网络环回2012-11-22 1288
-
DS34S132与TDMoP器件互操作的实现2011-04-18 2563
-
如何实现DS34S132与其它TDMoP器件的互操作2011-03-20 2217
-
延迟线网络回路支持使用TDMoP设备-FDL Network2009-05-07 1497
-
Maxim的TDM-over-Packet (TDMoP)设2009-04-20 2605
全部0条评论

快来发表一下你的评论吧 !
