

freeRTOS中的消息邮箱
描述
**1、freeRTOS中的消息邮箱 **
freeRTOS实现的消息邮箱是基于任务通知方式而实现的。
采用这种方式有什么优势呢?
从官方给出的测试报告中有说明到,唤醒由于信号量和事件标志组而处于阻塞态的任务,消息邮箱的速度会提升大约 45%,而且这种方式需要的 RAM 空间更小。
freeRTOS中的消息邮箱使用是比较灵活的,它可以实现二值信号量、计数信号量、事件标志组、消息队列等通知方式。
但用这种 方式实现信号量和事件标志组也有它的局限性,主要表现在以下两个方面:
1)任务通知方式仅可以用在只有一个任务等待信号量,消息邮箱或者事件标志组的情况。
2)如果使用任务通知方式实现消息邮箱替代消息队列时,发送消息的任务是不支持超时等待的。在消息队列中,当数据已经满时,是可以等待消息队列有空间才存新的数据的,但是任务通知方式实现的消 息邮箱就不支持超时等待。
2、有关freeRTOS中的任务控制块
freeRTOS中的每一个任务都有一个任务控制块,而任务控制块本质就是一个结构体变量,用于记录任务的相关的消息。
而在结构体变量中有一个32位的变量成员ulNotifiedValue是可以专门用于任务通知的。这个变量可以实现计数信号量,二值信号量,事件标志组和消息邮箱(消息邮箱就是消息队 列长度为 1 的情况)。
ulNotifiedValue 实现的:
1)设置接收任务控制块中的变量 ulNotifiedValue 可以实现消息邮箱。
2)如果接收任务控制块中的变量 ulNotifiedValue 还没有被其接收到,也可以用新数据覆盖原有数据 ,这就是 覆盖方式的消息邮箱 。
3)设置接收任务控制块中的变量 ulNotifiedValue 的 bit0-bit31 数值可以实现事件标志组。
4)设置接收任务控制块中的变量 ulNotifiedValue 数值进行加一或者减一操作可以实现计数信号量和二 值信号量。
3、freeRTOS中消息邮箱的管理API函数
消息邮箱实现的相关API函数:
3.1、消息邮箱的创建
freeRTOS中的消息邮箱是用于任务之间的一种通知方式,它的使用是不需要像信号量这样要专门创建的。是直接发送通知的。
3.2、消息邮箱的发送
1)在任务函数中发送
函数原型:
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify, /* 任务句柄 */
uint32_t ulValue, /* 更新任务控制块中的变量 ulNotifiedValue */
eNotifyAction eAction ); /* 任务通知模式设置 */
函数描述:
第 1 个参数是任务句柄。
第 2 个参数是用来更新任务控制块中的 32 位变量 ulNotifiedValue。
第 3 个参数是任务通知模式设置,支持以下 5 个参数:
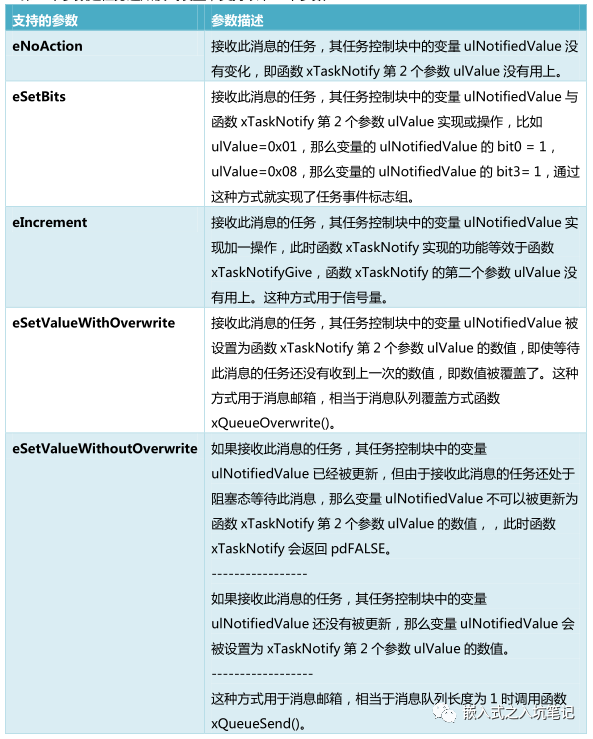
返回值,根据上面第3个参数的说明,将其设置为 :
eSetValueWithoutOverwrite ,有可能返回 pdFALSE,其余所有情况都返回值 pdPASS。
使用这个函数要注意以下问题:
1)任务创建后,任务控制块中的变量 ulNotifiedValue 初始计数值是 0。
2)默认配置此函数可以使用的的宏定义已经在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
当然,如果不需要使用任务通知功能相关的函数,可以在 FreeRTOSConfig.h 文件中配置此宏定 义为 0 来禁止,这样创建的每个任务可以节省 8 个字节的需求。
3)此函数是用于任务代码中调用的,故不可以在中断服务程序中调用此函数,中断服务程序中使用的是 xTaskNotifyFromISR。
4)根据 FreeRTOS 的建议,实现二值信号量和计数信号量时使用函数 xTaskNotifyGive()替代此函数 xTaskNotify()。
2)在中断中发送
函数原型:
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify, /* 任务句柄 */
uint32_t ulValue, /* 更新任务控制块中的变量 ulNotifiedValue */
eNotifyAction eAction, /* 任务通知模式设置 */
BaseType_t *pxHigherPriorityTaskWoken ); /* 高优先级任务是否被唤醒的状态保存 */
函数描述:
函数 xTaskNotifyFromISR 通过设置任务控制块中的变量 ulNotifiedValue 可以在中断服务程序中实现任 务事件标志组,任务计数信号量,任务消息邮箱和任务二值信号量四种方式的消息通知。
第 1 个参数是任务句柄。
第 2 个参数是用来更新任务控制块中的 32 位变量 ulNotifiedValue。
第 3 个参数是任务通知模式设置,支持以下 5 个参数:


第4个参数用于保存是否有高优先级任务准备就绪。如果函数执行完毕后,此参数的数值是 pdTRUE , 说明有高优先级任务要执行,否则没有。
返回值,根据上面第 3 个参数的说明,将其设置为:
eSetValueWithoutOverwrite ,有可能返回 pdFALSE ,其余所有情况都返回值 pdPASS 。
使用这个函数要注意以下问题:
- 任务创建后,任务控制块中的变量** ulNotifiedValue **初始计数值是 0。
- 默认配置此函数可以使用的的宏定义已经在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
当然,如果用户不需要使用任务通知功能相关的函数,可以在 FreeRTOSConfig.h 文件中配置此宏定 义为 0 来禁止,这样创建的每个任务可以节省 8 个字节的需求。
3)此函数是用于中断服务程序中调用的,故不可以在任务代码中调用此函数,任务代码中使用的是 xTaskNotify。
4)FreeRTOS 的建议,实现二值信号量和计数信号量时使用函数 vTaskNotifyGiveFromISR ()替代 此函数 xTaskNotifyFromISR ()。
3.3、等待消息邮箱
(1)等待消息邮箱
函数原型:
BaseType_t xTaskNotifyWait(
/* 设置函数执行前清零任务控制块中变量 ulNotifiedValue 那些位 */
uint32_t ulBitsToClearOnEntry,
/*设置函数退出前清零任务控制块中变量 ulNotifiedValue 那些位 */
uint32_t ulBitsToClearOnExit,
/* 保存任务控制块中的变量 ulNotifiedValue 到指针变量 pulNotifiedValue 所指向的存储单元 */
uint32_t *pulNotificationValue,
/* 等待消息通知的最大等待时间 */
TickType_t xTicksToWait
);
函数描述:
函数 xTaskNotifyWait 可以在任务代码中实现任务事件标志组,任务计数信号量,任务消息邮箱和任务二 值信号量四种方式的消息获取。
第 1 个参数 ulBitsToClearOnEntry 用于函数执行之前,将任务控制块中的变量 ulNotifiedValue 进 行如下操作 :
ulNotifiedValue &= ~ulBitsToClearOnEntry
简单的说就是参数 ulBitsToClearOnEntry 哪个位是 1,那么变量 ulNotifiedValue 的那个位就会被 清零。比如 ulBitsToClearOnEntry = 0x01 表示将变量 ulNotifiedValue 的 bit0 清零,又比如 ulBitsToClearOnEntry = 0xffffffff 表示将变量 ulNotifiedValue 的所有位清零。
第 2 个参数 ulBitsToClearOnExit 用于函数退出前,将任务控制块中的变量 ulNotifiedValue 进行如 下操作 :
ulNotifiedValue &= ~ ulBitsToClearOnExit
简单的说就是参数 ulBitsToClearOnExit 哪个位是 1,那么变量 ulNotifiedValue 的那个位就会被清 零。比如 ulBitsToClearOnExit= 0x01 表示将变量 ulNotifiedValue 的 bit0 清零,又比如 ulBitsToClearOnExit= 0xffffffff 表示将变量 ulNotifiedValue 的所有位清零。
第 3 个参数用于将任务控制块中的变量 ulNotifiedValue 保存到此参数指针所指向的存储单元。如果 此参数没有用上,可以将其设置为 NULL。
第 4 个参数是没有消息时,等待消息的最大等待时间,单位系统时钟节拍。
返回值,如果成功接收到消息返回 pdTRUE,否则返回 pdFALSE,比如在设置的超时时间内没有收 到消息。
使用这个函数要注意以下问题:
1)任务创建后,任务控制块中的变量 ulNotifiedValue 初始计数值是 0。
2)默认配置此函数可以使用的的宏定义已经在 FreeRTOS.h 文件中使能:
#define configUSE_TASK_NOTIFICATIONS 1
当然,如果用户不需要使用任务通知功能相关的函数,可以在 FreeRTOSConfig.h 文件中配置此宏定 义为 0 来禁止,这样创建的每个任务可以节省 8 个字节的需求。
3)如果用户将 FreeRTOSConfig.h 文件中的宏定义 INCLUDE_vTaskSuspend 配置为 1 且第 2 个参数配 置为:
portMAX_DELAY ,那么此函数会永久等待直到消息可用。
4)根据 FreeRTOS 的建议,实现二值信号量和计数信号量时使用函数 ulTaskNotifyTake ()替代此函数 xTaskNotifyWait ()。
4、消息邮箱的应用示例
为了更好的说明freeRTOS中的消息邮箱的使用。下面给出了一个简单的示例。
代码思路如下:
创建3个任务:start_task,led0_task,led2_task。start_task任务用于创建led0_task和led2_task任务,led0_task任务判断按键的情况,然后根据按键按下,消息邮箱发送不同的消息到任务led2_task,在这个任务中改变LED2和LED3的状态。代码示例如下:
void start_task(void *pvParameters)
{
pvParameters = pvParameters;
taskENTER_CRITICAL(); //进入临界区
xTaskCreate((TaskFunction_t) led0_task,
(const char*) "led0_task",
(uint16_t) TASK_STK_LED0_SIZE,
(void*) NULL,
(UBaseType_t) TASK_LED0_PRIO,
(TaskHandle_t*) &LED0_Handler );
xTaskCreate((TaskFunction_t) led2_task,
(const char*) "led2_task",
(uint16_t) TASK_STK_LED2_SIZE,
(void*) NULL,
(UBaseType_t) TASK_LED2_PRIO,
(TaskHandle_t*) &LED2_Handler );
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
void led0_task(void *pvParameters)
{
//pvParameters = pvParameters;
BaseType_t err = pdFALSE;
uint32_t MboxValue=0;
for(;;)
{
if(gd_eval_key_state_get(KEY_WAKEUP) == RESET)
{
MboxValue = 10;
err = xTaskNotify((TaskHandle_t ) LED2_Handler, //任务句柄,指明往哪个任务发送消息,很重要
(uint32_t ) MboxValue, //发送的消息
(eNotifyAction) eSetValueWithOverwrite //消息发送方式
);
}
else if(gd_eval_key_state_get(KEY_TAMPER) == RESET)
{
MboxValue = 50;
err = xTaskNotify((TaskHandle_t ) LED2_Handler, //任务句柄
(uint32_t ) MboxValue, //发送的消息
(eNotifyAction) eSetValueWithOverwrite //消息发送方式
);
}
else{}
gd_eval_led_toggle(LED4);
vTaskDelay(200);
}
}
void led2_task(void *pvParameters)
{
//pvParameters = pvParameters;
uint32_t notifyValue = 0;
BaseType_t err;
for(;;)
{
err = xTaskNotifyWait((uint32_t ) 0x00, //进入函数时不清楚bit
(uint32_t) 0xffffffff, //退出函数时清除所有的bit
(uint32_t*) ¬ifyValue, //保存消息的内容
(TickType_t) portMAX_DELAY //阻塞时间
);
if(err == pdTRUE)
{
switch(notifyValue)
{
case 10:
gd_eval_led_toggle(LED2);
break;
case 50:
gd_eval_led_toggle(LED3);
break;
default:
break;
}
}
vTaskDelay(100);
}
}
-
QQ邮箱手机上如何配置POP/IMAP?2010-02-25 13110
-
FreeRTOS中的任务管理2023-11-27 2404
-
用的cube生成的freertos工程,串口和任务通过邮箱通讯,结果任务反应很慢是怎么回事?2024-05-08 443
-
STM32CubeMX FreeRTOS学习[5] 邮箱队列(Lu)2016-09-06 10565
-
转:第27章 FreeRTOS任务消息邮箱2016-09-09 30330
-
电子邮箱,电子邮箱是什么意思2010-03-06 28733
-
RT-Thread的邮箱服务,包括邮箱工作机制、工作管理方式以及应用示例2019-03-28 15023
-
STM32中断及FreeRTOS中断优先级配置2020-03-04 10913
-
FreeRTOS中相对延时与绝对延时的区别2020-03-12 10294
-
FreeRTOS中的API函数功能分析及调用方法2021-03-26 1061
-
Freertos 的移植中 “FreeRTOSConfig.h“ 的配置2021-12-04 817
-
基于STM32的FreeRTOS开发(1)----FreeRTOS简介2023-07-27 3096
-
FreeRTOS中的空闲任务是什么2023-07-30 2457
-
uC/OS-II—邮箱介绍2023-09-11 3239
-
SoC的核间通信机制硬件邮箱2023-09-13 2574
全部0条评论

快来发表一下你的评论吧 !
