

“超灵敏电子皮肤”为手术机器人练手感
机器人
描述
手术机器人是现代医疗设备应用的重要里程碑,已经获得广泛的临床应用。但与经验丰富的人类外科医生相比,目前的手术机器人往往缺乏“手感”,难以通过触觉的精确、实时反馈,对人体组织进行低力度的精细化手术操作。
为解决这一问题,华中科技大学吴豪、尹周平团队研制了一款具有超高灵敏度的电子皮肤,它能够检测到切割不同生物组织时的微小接触力差别,为手术机器人提供精密操作下的接触力反馈。相关成果发表于《国家科学评论》(National Science Review, NSR),魏丹阳为论文第一作者,吴豪、尹周平为共同通讯作者。
这种超灵敏电子皮肤采用电容式传感原理,包括两片柔性电极和一个具有仿生结构的离子凝胶层——离子凝胶层模仿鹅肠菜花粉的多级微纳结构,使该电子皮肤具备了极高的灵敏度和较宽的测量范围,能够为手术机器人提供精细操作下的接触力反馈。
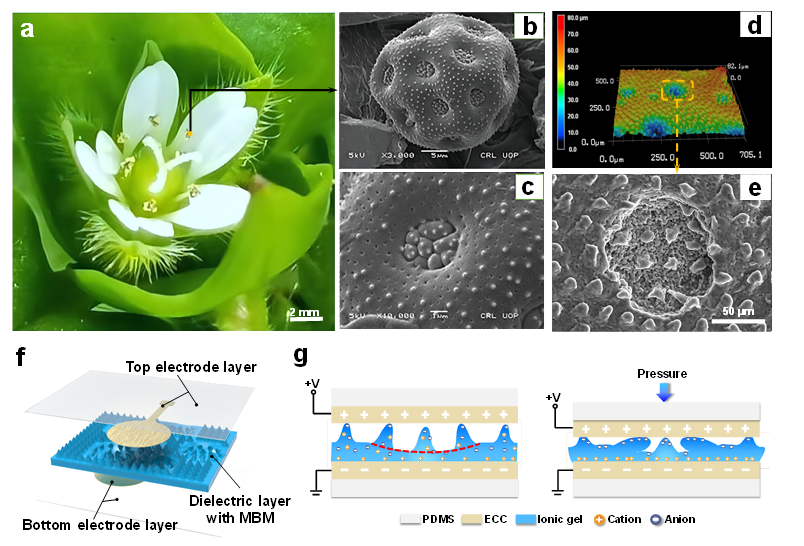
具有仿生结构的超灵敏电子皮肤。
(a)鹅肠菜花朵实物图;(b)鹅肠菜花粉SEM图;(c)花粉局部放大图;(d)仿生结构表面形貌;(e)仿生结构SEM放大图;(f)电子皮肤结构图 (g)电子皮肤传感原理图。
离子凝胶层上的仿生微结构不仅增加了与电极之间的接触面积,而且增加了整体凝胶层的可压缩性,使电子皮肤的灵敏度达到了9484.3 kPa-1(<15 kPa)。在15-155kPa的范围内,灵敏度依然保持在235 kPa-1以上,并且显示出优秀的线性度。该传感器实现了低至0.13 Pa的检测限,可检测出重量为0.35 mg的物体,在循环5000次后性能保持不变。
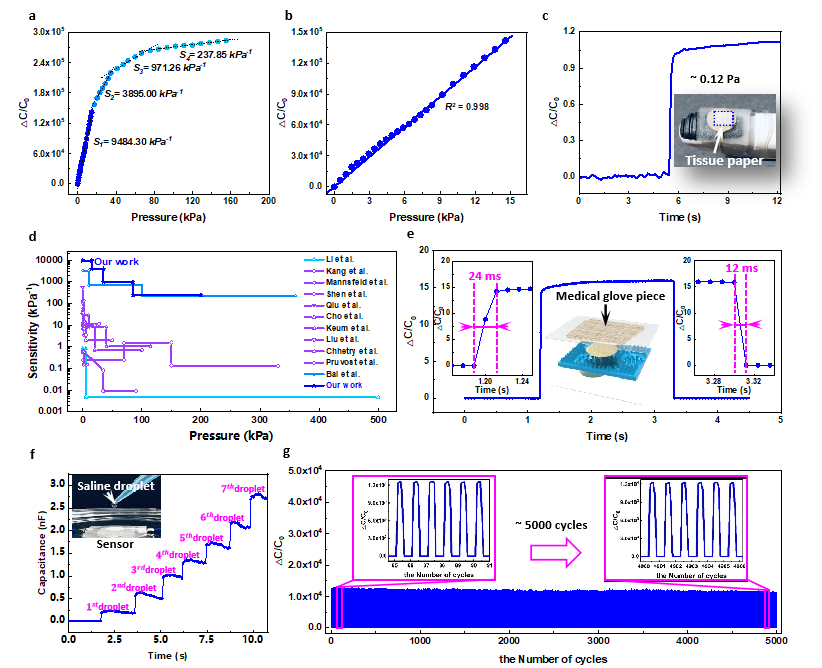
电子皮肤的检测性能。
(a)0-155kPa范围内的灵敏度;(b)0-15kPa范围内的灵敏度;(c)电子皮肤对微小应力(0.12Pa)的检测能力;(d)对比其它研究的灵敏度;(e)电子皮肤响应及恢复时间;(f)电子皮肤对连续水滴的检测能力;(g)电子皮肤循环次数稳定性。
在展示实验中,在电子皮肤提供的触觉反馈的辅助下,机器人可完成穿针引线的操作过程,并检测出穿针成功与不成功时的不同触觉信号。
如下图所示,在第一次及第二尝试穿针失败时,线头触碰到针孔附近的电子皮肤而产生信号变化,而在第三次尝试穿针成功时,线头直接穿过针孔,未接触附近的电子皮肤,所以基本没有信号变化。该应用有望为机器人提供灵敏的触觉感知,实现精密装配、抓取分拣等精细操作。
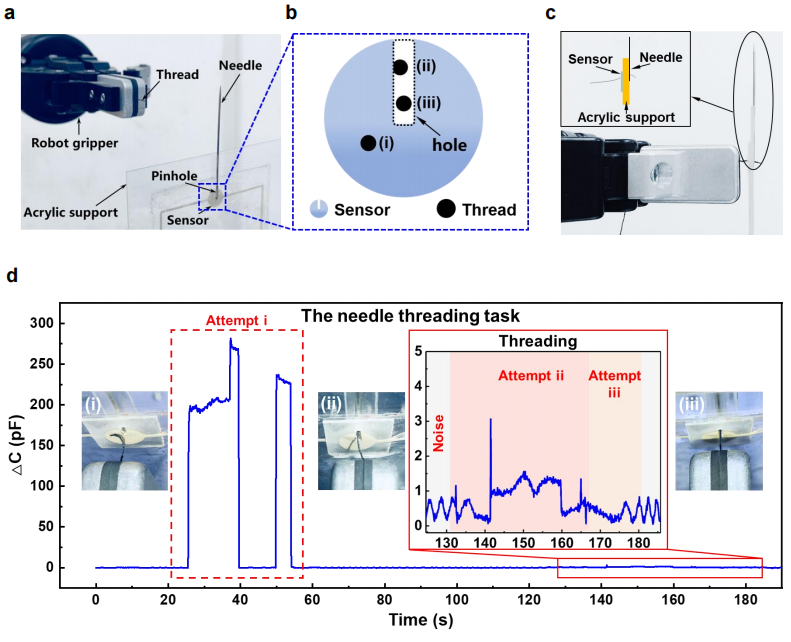
三次穿针过程中的检测信号
在进一步的手术切割实验中,该电子皮肤能够感知手术刀切割不同组织的接触力区别。文中演示了电子皮肤测量切割肌肉和肝脏组织过程中的接触力变化。
如下图所示,在切割过程的不同时段,手术刀切割具有不同性质的不同生物组织,传感器也测量到不同的接触力。该接触力的变化能够有效地反映出切割点附近的生物组织状态,从而为医生提供手术切割位置参考,降低组织切面的粗糙度促进组织愈合速度。
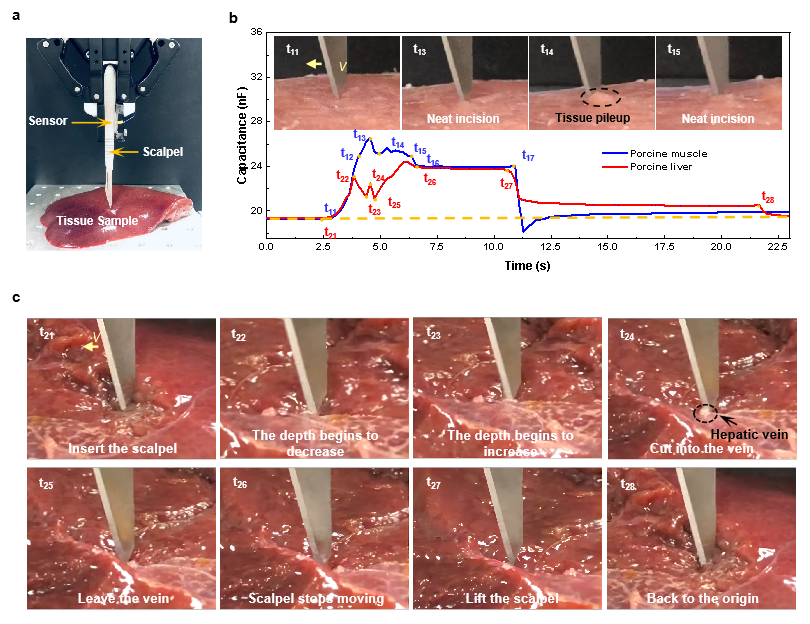
机器人切割肌肉及肝脏组织时的传感器反馈
该电子皮肤具有超高的灵敏度,能够为手术机器人提供精细操作的触觉反馈,有望在神经科、泌尿科等需要精细操作的外科手术上应用。
编辑:黄飞
-
手术机器人界掌门地位如何炼成2016-09-23 2344
-
国外手术机器人新技术开发情况2011-03-01 5832
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
nao机器人与其他机器人的区别2015-02-13 6830
-
当前最实用的十大医疗机器人2015-03-02 8573
-
电子产品和机器人皮肤未来会使用什么材料?2016-09-02 4317
-
全国首例!西安女子接受机器人牙科手术2017-09-28 3754
-
全球首例骨科手术机器人5G远程手术成功完成产生了多大的影响?2019-09-11 4553
-
如何去实现一种基于传感器的机器人手术系统设计2021-09-28 2197
-
脊柱手术机器人ORTHBOT成功完成手术,填补了国内脊柱手术机器人的空白2018-08-31 5942
-
浙江儿童医院引入达芬奇手术机器人,已完成超100例机器人手术2020-08-24 4981
-
外科手术辅助机器人方案的简单介绍2021-07-12 972
-
手术机器人是如何辅助手术的?普爱手术机器人临床案例分享2022-12-15 2347
-
2022骨科手术机器人的进展如何2023-02-07 2632
-
柔性电子技术革新与人形机器人的电子皮肤应用前景2024-08-06 1838
全部0条评论

快来发表一下你的评论吧 !
