

STM32的串口通信
描述
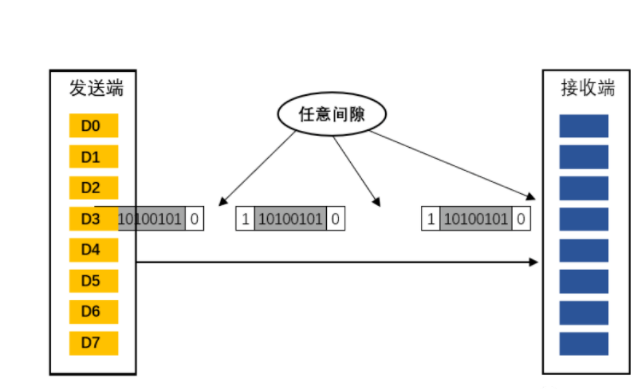
串口通信的接口标准有很多,有 RS-232C、RS-232、RS-422A、RS-485 等。常用的就是 RS-232 和 RS-485。RS-232 其实是 RS-232C 的改进,原理是一样的。我们所使用的串口(USART)又称为通用同步异步收发器,我们所使用的是异步串行通信,异步串行通信示意图如下所示:
2、串口软件配置
#include "stm32f10x.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//开启时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //将LED端口拉高,熄灭所有LED
}
// USART1初始化函数
void USART1_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //串口输出PA9
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //串口输入PA10
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
// USART1中断函数
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 r;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
r =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
USART_SendData(USART1,r);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET);
}
USART_ClearFlag(USART1,USART_FLAG_TC);
}
int main( void )
{
LED_Init();
USART1_Init(115200);
while(1)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
}
}
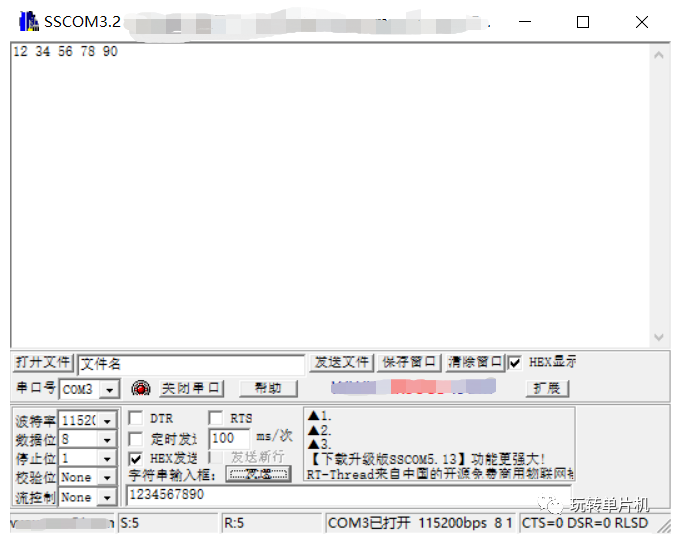
3、验证程序是否通过测试,下图可以看出程序可以正常使用
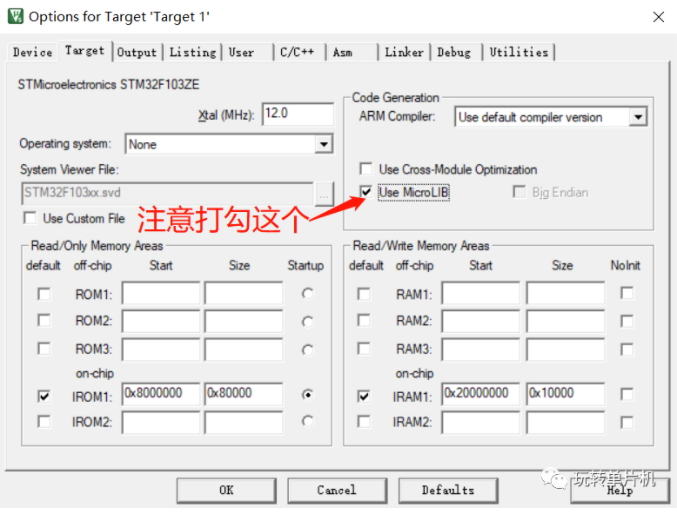
4、重定向配置
#include "stm32f10x.h"
#include "stdio.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//开启时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //将LED端口拉高,熄灭所有LED
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定义GPIO结构体变量
USART_InitTypeDef USART_InitStruct; //定义串口结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的时钟
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9为复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10为浮空输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //发送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //无奇偶校验
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //无硬件数据流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函数
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函数
{
USART_SendData(USART1,(uint8_t)ch); //发送一字节数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待发送完成
return ch;
}
int main( void )
{
uint32_t i;
LED_Init();
USART_init(115200);
while(1)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
for(i=0;i<655350;i++);
printf("printf testrn");
}
}
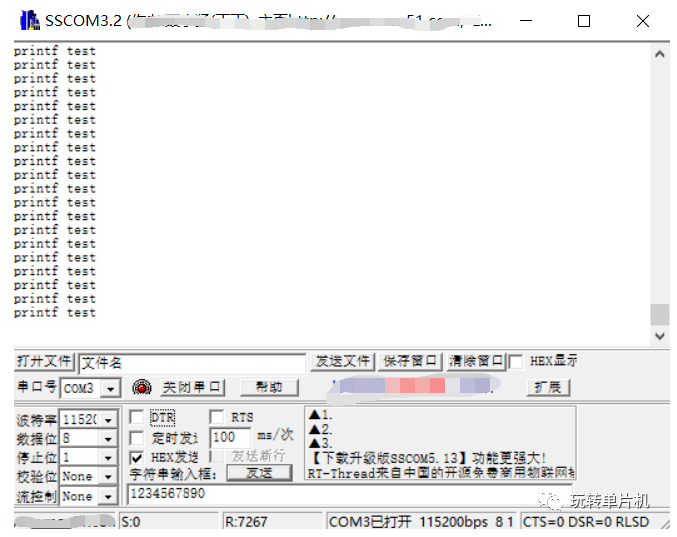
5、验证程序,下图可以看出程序正常
--END--
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于stm32的串口通信代码2022-06-15 993
-
STM32的串口通信接口有哪几种2022-02-14 2193
-
Arduino下的STM32的串口通信2021-12-24 1624
-
STM32 串口通信实验2021-12-20 1089
-
基于是stm32的串口通信2021-12-16 738
-
怎样去设计一种STM32的串口通信接口呢2021-12-13 1206
-
如何在Ardunio下完成STM32的串口通信?2021-12-09 1678
-
如何对STM32的串口通信进行配置呢2021-12-08 1994
-
如何利用Arduino IDE去完成stm32的串口通信呢2021-12-07 1703
-
求大佬分享ROS与STM32的串口通信的程序2021-12-06 1013
-
串口通信简介和STM32的串口通信2021-08-04 1916
全部0条评论

快来发表一下你的评论吧 !
