

卡曼滤波器入门教程α−β−γ滤波器 3
模拟技术
描述
现在我们准备开始一个数值示例:
考虑一架飞机在一维世界中径向远离雷达(或朝向雷达)
α−β滤波器参数为:
α=0.2
β=0.1
跟踪周期为5秒
迭代0:
初始化:
时间n=0的初始条件:
注意: 跟踪初始化(或我们如何获得初始条件)是稍后将讨论的一个重要主题。现在,我们的目标是了解基本的α−β滤波器操作,所以让我们假设初始条件是由其他系统给出的。
预测:
应使用状态推导方程猜测第一个周期(n=1)状态:

迭代1:
在第一个周期(n=1)中,初始猜测是先前的估计:
步骤1:
雷达测量飞机航程:
z1=30110m
步骤2:
使用状态更新方程计算当前估计:

步骤3:
使用状态推导方程计算下一状态估计:

迭代2:
经过一个完整的周期后,来自上一次迭代的预测估计变为当前迭代中的上一次估计:
步骤1:
雷达测量飞机航程:
z2=30265m
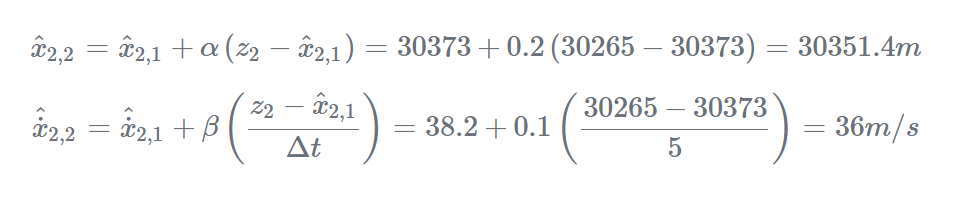
步骤2:
使用状态更新方程计算当前估计:
步骤3:
使用状态推导方程计算下一状态估计:

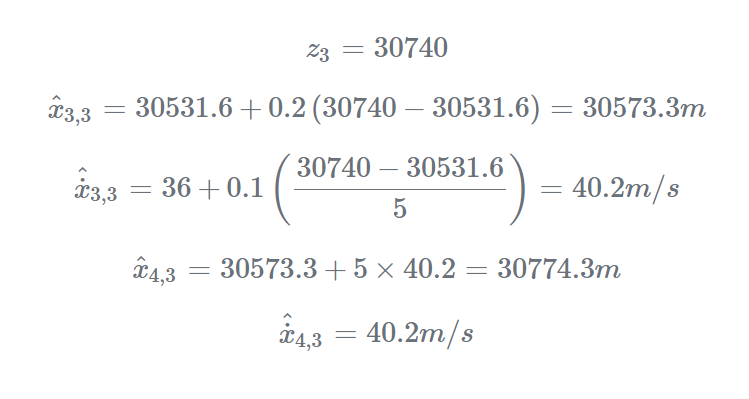
迭代3:
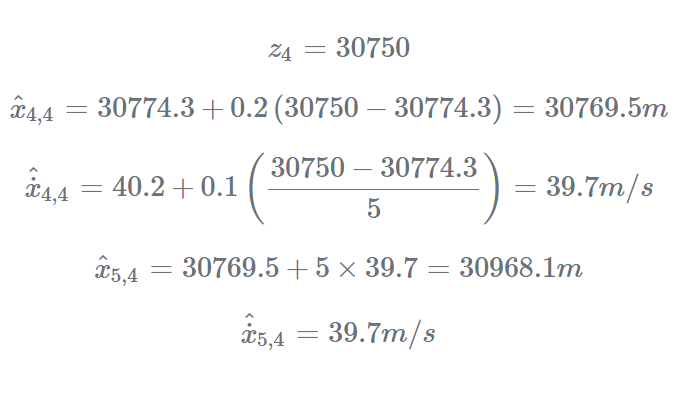
迭代4:
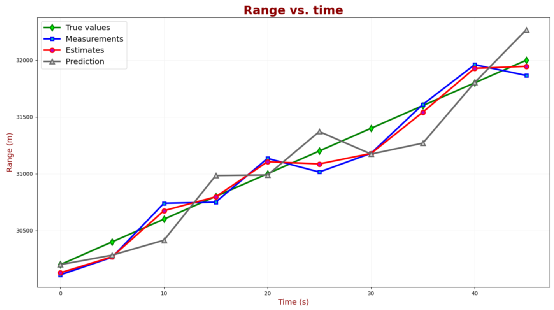
下表总结了我们的测量和估计:
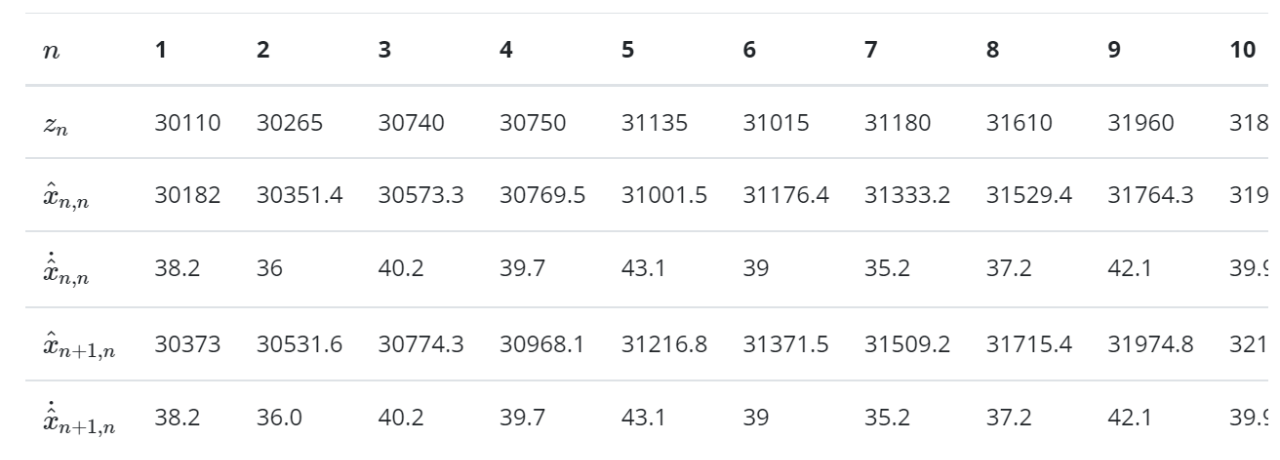
我们的估计算法对测量结果具有平滑效果,并向真实值收敛。
使用大的α和β:
下图描述了当α=0.8和β=0.5的真实值、测量值和估计值:
此过滤器的“平滑”程度要低得多,虽然估计值与测量值非常接近,但与真实值误差很大,估计误差非常高。
那么,我们应该总是选择小的α和β值吗?
答案是否定的,α和β的值应取决于测量精度,如果我们使用高精度设备,如激光雷达,我们会更喜欢更大的α和β值,在这种情况下,滤波器将快速响应目标的速度变化,另一方面,如果测量精度低,我们更喜欢低α和β,在这种情况下,滤波器平滑了测量中的不确定性(误差),然而,过滤器对目标速度变化的反应将慢得多。
总结:
我们推导出了α−β滤波器状态更新方程,我们还学习了状态推导方程,我们开发了一种基于α−β滤波,并求解了一个等速目标的数值示例。
示例3:追踪一维世界中加速飞行器
在这个例子中,我们将使用 α−β滤波器追踪一个具有恒定加速度的飞行器,在前面的例子中,我们跟踪了一架以40m/s的恒定速度移动的无人机。下表描述了目标距离和速度与时间的关系。
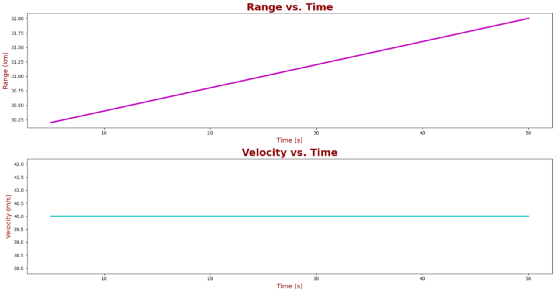
如图所见,航程函数是线性的。
现在让我们来看看一架战斗机。这架飞机以50m/s的恒定速度飞行15秒。然后飞机以8m/s2的恒定加速度加速35秒。
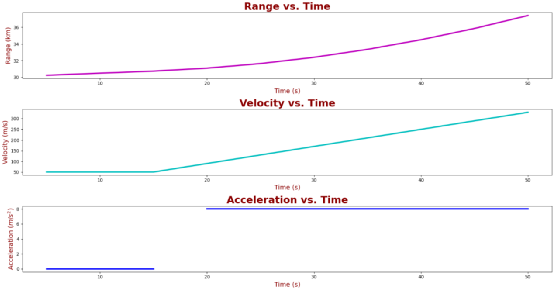
从图表中可以看到,飞机速度在前15秒保持恒定,然后呈线性增长。航程在前15秒呈线性增长,然后呈二次曲线增长。
我们要用前面例子中使用的α−β过滤器来追踪这架战斗机。
数值示例:
考虑一架飞机在一维世界中径向朝向(或远离)雷达。
α−β滤波器参数为:
α=0.2
β=0.1
追踪周期5秒
迭代0:
初始化:
给出了时间n=0的初始条件:
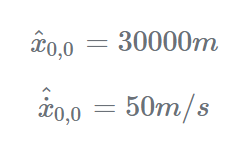
注意: 跟踪初始化(或我们如何获得初始条件)是稍后将讨论的一个重要主题。现在,我们的目标是了解基本的α−β滤波器操作,所以让我们假设初始条件是由其他系统给出的。
预测:
应使用状态推导方程对第一个周期(n=1)状态进行推导:

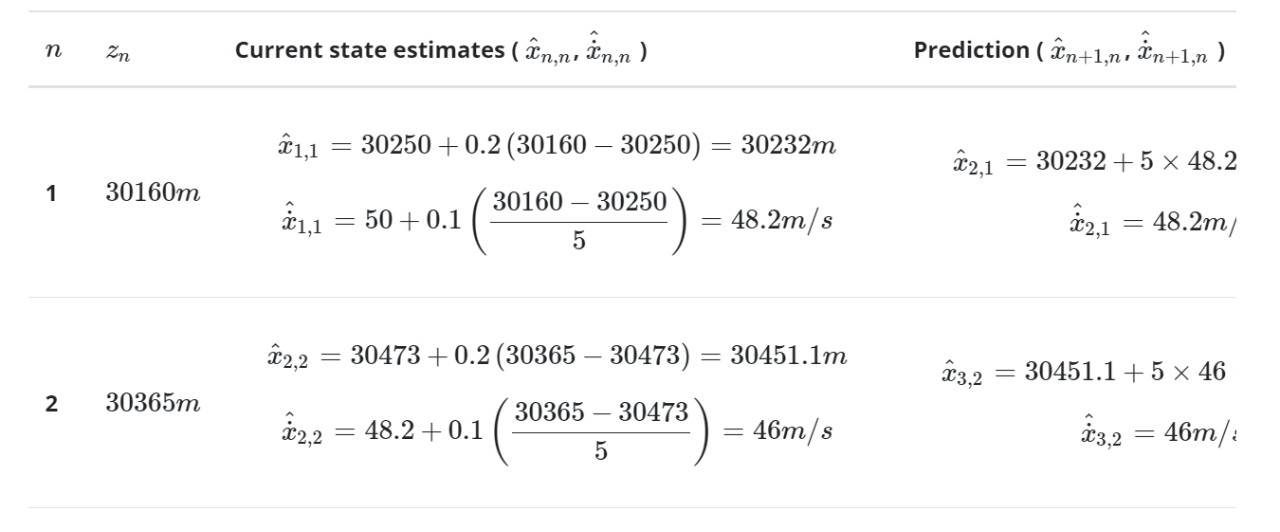
下表列出了所有过滤器迭代结果:
以下图表比较了前75秒的距离和速度的真实值、测量值和估计值:
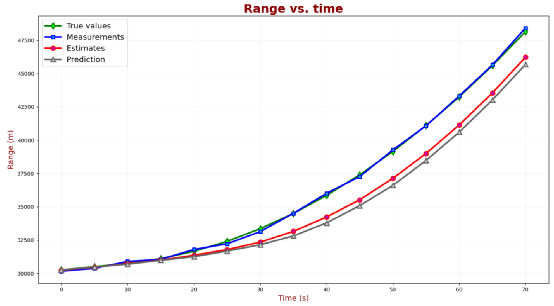
您可以看到真实值或测量值与估计值之间的存在恒定差距,这种差距称为滞后误差。滞后误差的其他常见名称为:
l动态错误
l系统误差
l偏差误差
l截断错误
滞后误差出现在加速期间,在加速期之后,过滤器缩小差距并向真实值收敛,然而,显著的滞后误差可能导致目标丢失,滞后误差在某些应用中是不可接受的,例如导弹制导或防空。
总结:
我们研究了恒定加速度引起的滞后误差。
-
卡尔曼滤波是属于一个什么滤波器?2023-10-11 765
-
卡曼滤波器入门教程概述2023-02-10 1292
-
卡尔曼滤波器是什么2021-11-16 1615
-
卡尔曼滤波器的使用原理2021-08-17 1535
-
基于卡尔曼滤波器的PID设计教程2021-06-03 1306
-
图解卡尔曼滤波器2018-02-07 5107
-
卡尔曼滤波器参数分析与应用方法研究2016-06-21 938
-
卡尔曼滤波器原理2008-07-14 1403
全部0条评论

快来发表一下你的评论吧 !
