

卡曼滤波器入门教程一维卡曼滤波器 3
电子说
描述
示例6–估计储罐中液体的温度
我们想估计储罐中液体的温度:
我们假设在稳定状态下,液体温度是恒定的,然而,真实液体温度是存在一些波动的,我们可以用以下方程描述该动态系统状态:
xn=T+wn
T是恒定温度wn是具有方差q的随机过程噪声
数值示例:
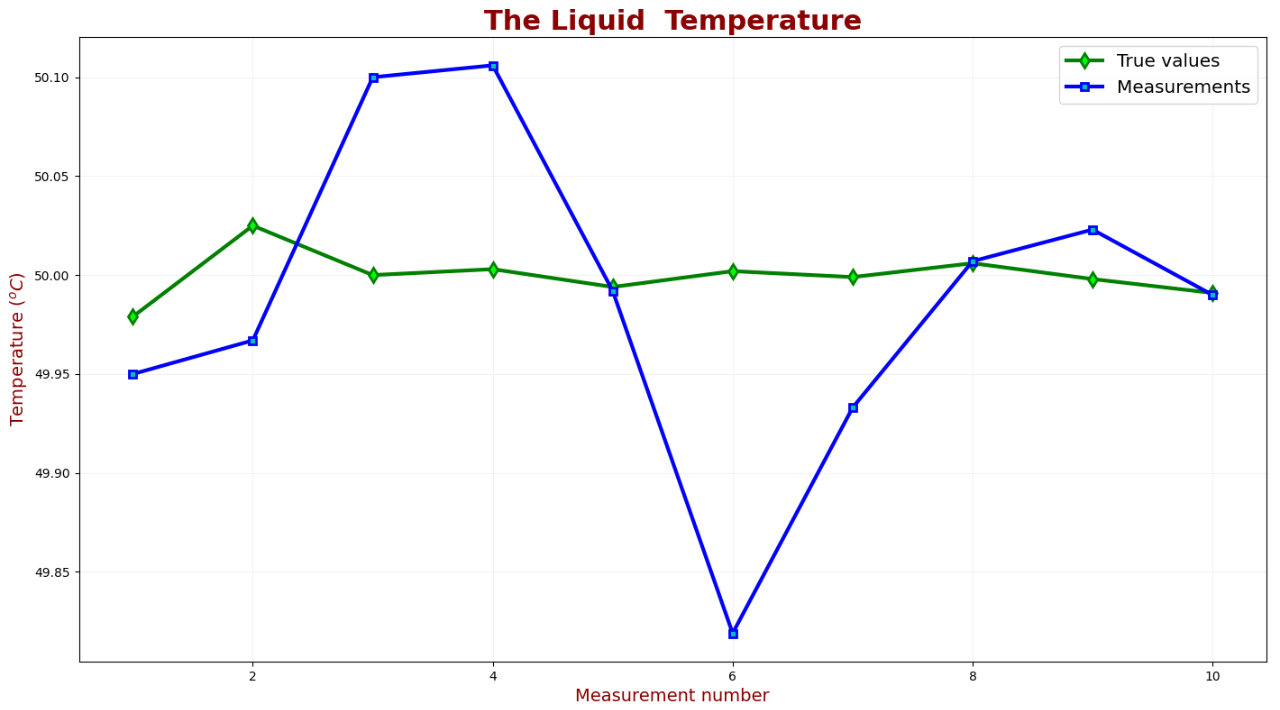
假设真实温度为50摄氏度我们假设模型是准确的,因此,我们将过程噪声方差(q)设置为0.0001测量误差(标准偏差)为0.1摄氏度。每5秒测量一次。每个测量点对应的真实液体温度值为:49.979℃、50.025℃、50℃、50.003℃、49.994℃、50.002℃、4.9.999℃、50.006℃、49.998℃和49.991℃。测量值为:49.95℃、49.967℃、50.1℃、50.106℃、49992℃、49.819℃、49933℃、50.007℃、50.023℃和49.99℃。下表对真实液体温度和测量值进行了比较:
迭代0
在第一次迭代之前,我们必须初始化卡尔曼滤波器并预测下一个状态(即第一个状态)。
初始化
我们不知道储罐中液体的真实温度,我们的猜测是10℃

=10
℃我们的猜测很不精确,因此我们将初始化估计误差σ设置为100,初始化的估计不确定度是误差方差(σ2):
p0,0=1002=10,000
方差非常大,如果我们用一个更有意义的初始化值,我们能够让卡尔曼滤波器更快地收敛。
预测
现在,我们将根据初始化值预测下一个状态,由于我们的模型是恒定的,预测的估计值等于当前的估计值:

=10
℃推导估计不确定度(方差):
p1,0=p0,0+q=10000+0.0001=10000.0001
迭代1步骤1-测量测量值是:
z1= 49.95
℃由于测量误差为0.1(σ),方差(σ2)为0.01;因此,测量不确定度为:
r1=0.01
步骤2-更新
计算卡曼增益:

卡尔曼增益几乎为1,即我们的估计误差远大于测量误差,因此,估计的权重可以忽略不计,而测量权重几乎为1。估计当前状态:

更新当前估计的不确定度:

步骤3-预测
由于我们系统是恒定的,即液体温度不变:
℃推导估计不确定值(方差)为:
p2,1=p1,1+q=0.01+0.0001=0.0101
迭代2步骤1-测量
测量值:
z2= 49.967
℃由于测量误差为0.1(σ),方差(σ2)为0.01;因此,测量不确定度为:
r2=0.01
步骤2-更新
计算卡曼增益:
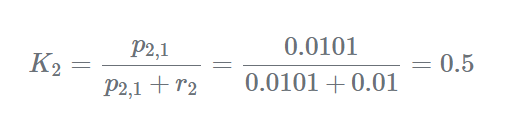
卡尔曼增益为0.5,即,估计权重和测量权重相等。估计当前状态:

更新当前估计的不确定性:

步骤3-预测
由于我们系统是恒定的,即液体温度不变:

℃推导估计不确定度(方差)为:
P3,3=p2,2+q= 0.005+0.0001=0.0051
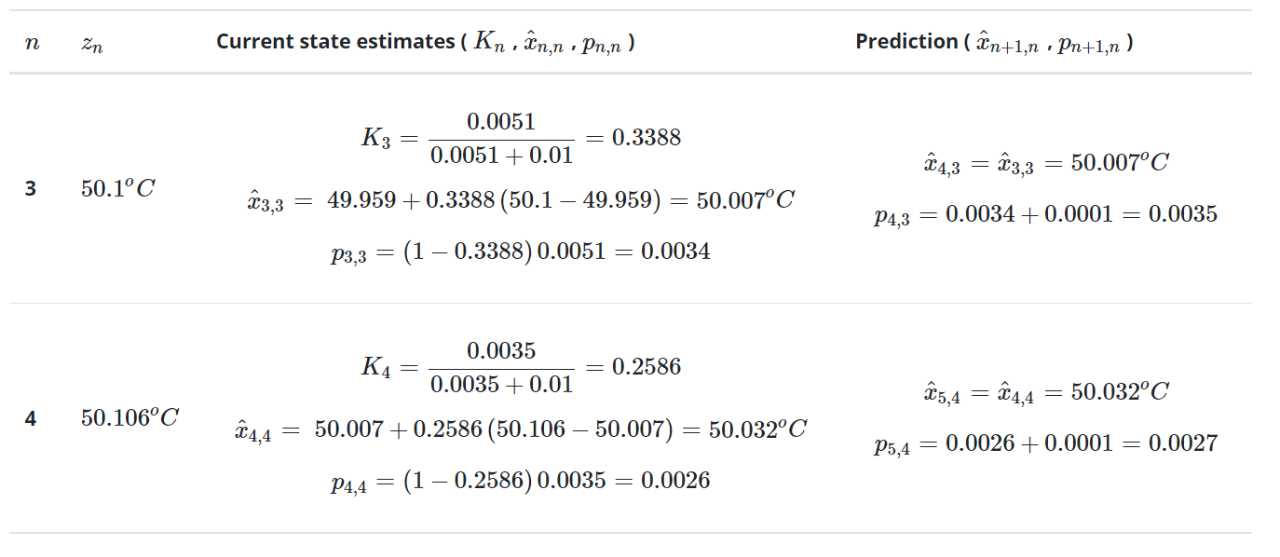
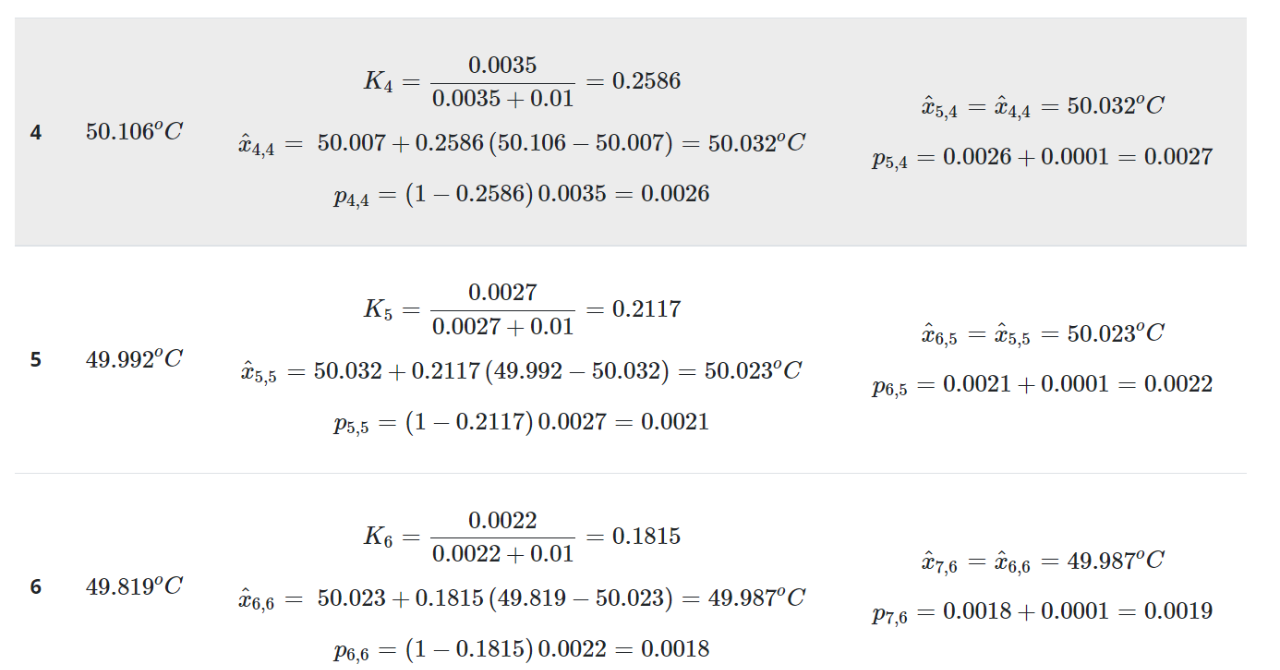
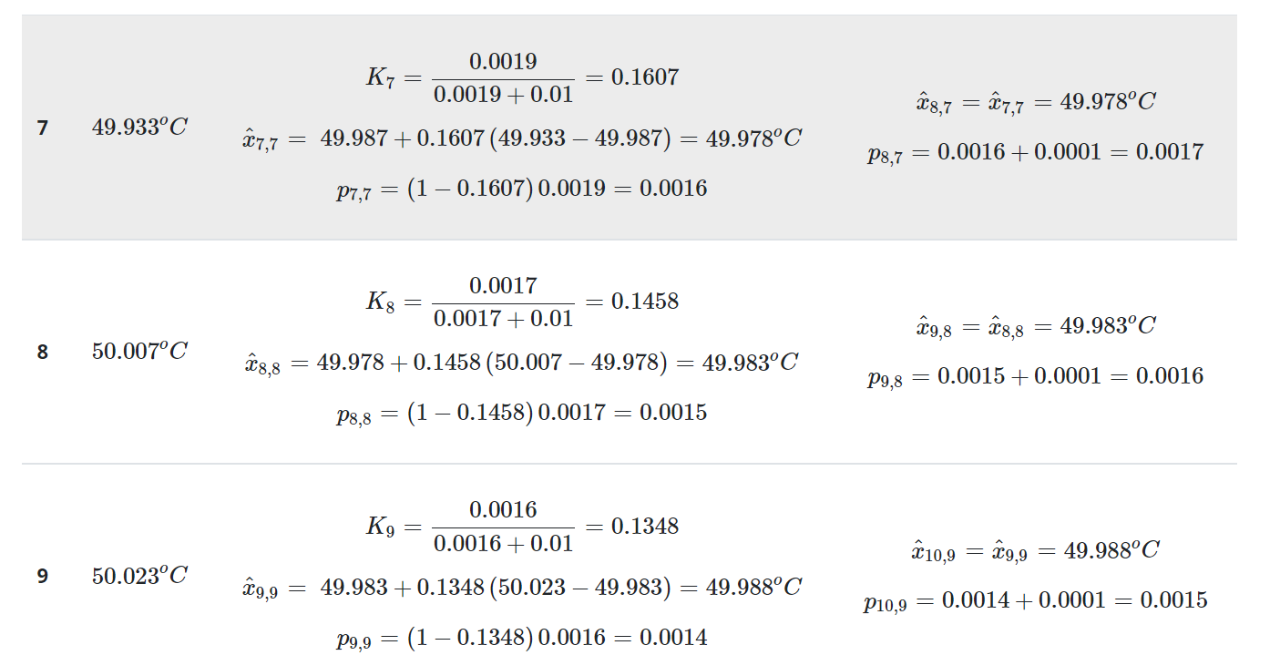
迭代3-10
下表总结了连续迭代的计算:
下表对真实值、测量值和估计值进行了比较:
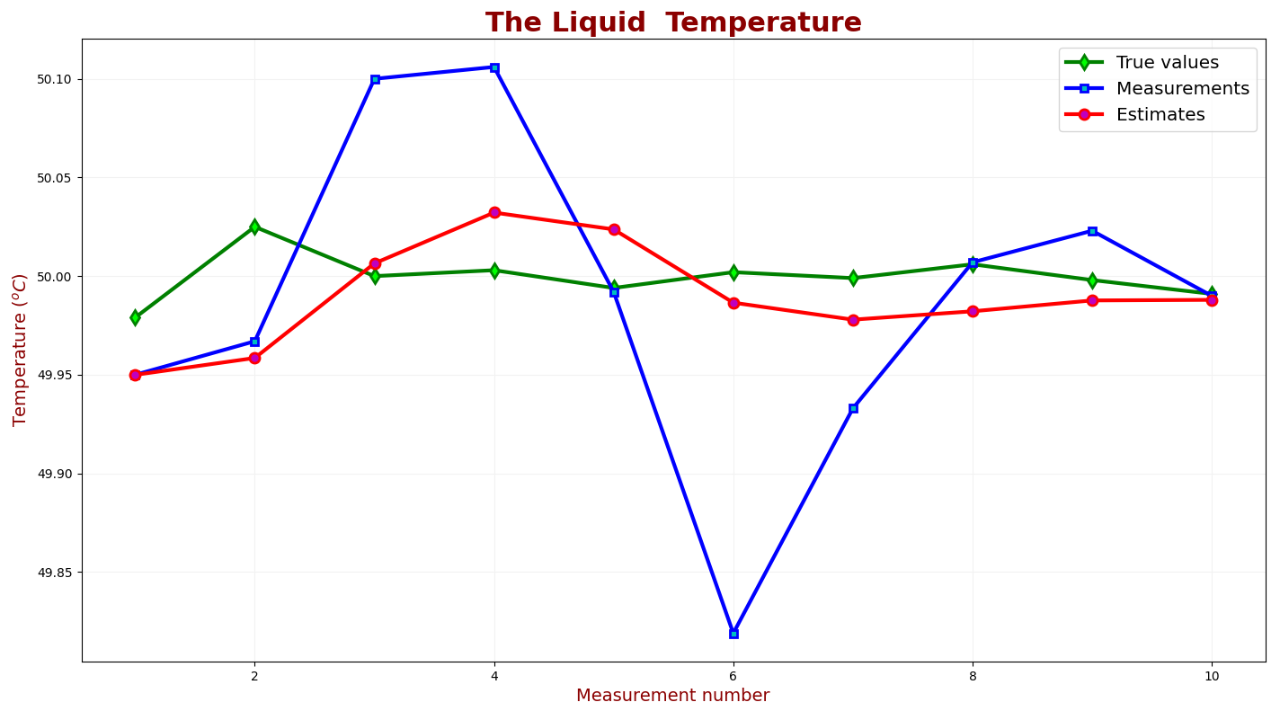
如图所见,估计值向真实值收敛,下表显示了估计的不确定性:
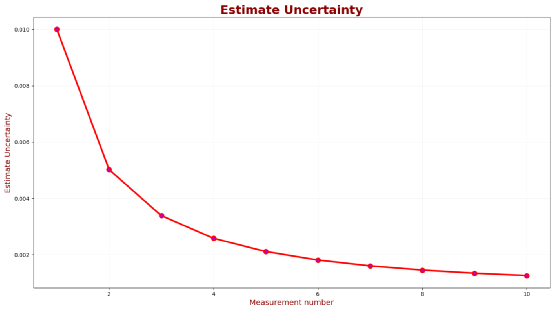
估计的不确定度迅速下降,10次测量后,估计不确定度(σ2)为0.0013,即估计误差标准偏差为:σ=0.036℃。因此,我们可以说液体温度估计值为:49.988±0.036℃
正如你所看到的,卡尔曼增益正在逐步下降,使得测量重量越来越小。
总结:
在本例中,我们使用一维卡尔曼滤波器测量液体温度,尽管系统包括随机过程噪声,但卡尔曼滤波器可以提供良好的估计。
- 相关推荐
- 热点推荐
- 卡尔曼滤波器
-
卡尔曼滤波是属于一个什么滤波器?2023-10-11 778
-
卡曼滤波器入门教程概述2023-02-10 1313
-
卡尔曼滤波器是什么2021-11-16 1632
-
卡尔曼滤波器的使用原理2021-08-17 1548
-
基于卡尔曼滤波器的PID设计教程2021-06-03 1321
-
图解卡尔曼滤波器2018-02-07 5113
-
卡尔曼滤波器参数分析与应用方法研究2016-06-21 949
-
卡尔曼滤波器原理2008-07-14 1413
全部0条评论

快来发表一下你的评论吧 !
