

FANUC工业机器人的运动指令
描述
FANUC工业机器人运动指令如下所示,运动指令包含运动类型、位置指示符号、位置数据类型、移动速度、定位类型、动作附加指令。
L @P[i] 400mm/sec FINE offset
“L”表示直线运动,运动指令中运动类型可为:J:Joint(关节运动)、L:Linear(直线运动)、C:Circular(圆弧运动)。
“@”表示当前位置指示。
“P[i]”表示i位置的一般位置数据,运动指令中位置数据类型可为:P[ ]: 一般位置、PR[]: 位置寄存器,i在其中表示位置号。
“400mm/sec”表示工业机器人在运动过程中移动速度。
“FINE”表示运动的精确定位,运动的定位类型可为:FINE(精确定位)、CNT(非精确定位)。
“offset”表示运动位置补偿指令,运动附加指令可为:ACC(加减速倍率指令)、offset(位置补偿指令)、INC(增量指令)等。
运动类型
1、FANUC工业机器人运动类型有:不进行轨迹控制/姿势控制的关节运动、进行轨迹控制/姿势控制的直线运动、以及圆弧运动。
2、关节运动 (J)
3、直线运动(包含旋转移动) (L)
4、圆弧运动 (C)
(1) 关节运动J
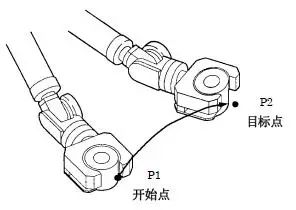
关节运动是机器人沿着所有轴同时加速,在示教速度下移动后,同时减速后停止,通常移动轨迹为非线性。关节移动速度的单位,以相对最大移动速度的百分比来记述。关节运动中中的工具姿势不受到控制。
例子:
1:J P[1] 100% FINE
2:J P[2] 70% FINE
(2) 直线运动L
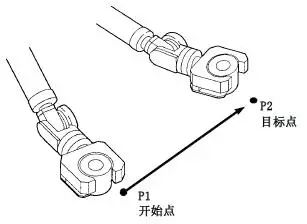
1) 直线运动是以线性方式对从运动开始点到结束点。直线移动速度的单位,从mm/sec、cm/min、inch/min、sec 中选择。直线运动中的工具姿势可以受到控制。
例:
1:J P[1] 100% FINE
2:L P[2] 500mm/sec FINE
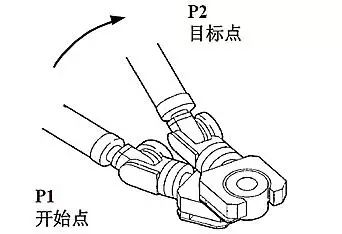
2) 旋转运动是使用直线运动,使工具的姿势从开始点到结束点以工具尖点为中心旋转的一种移动方法。旋转运动中的工具姿势可以受到控制。此时,移动速度要用deg/sec 为单位。移动轨迹(工具尖点移动的情况下)通过线性方式进行控制。
例:
1:J P[1] 100% FINE
2:L P[2] 30deg/sec FINE
(3) 圆弧运动C
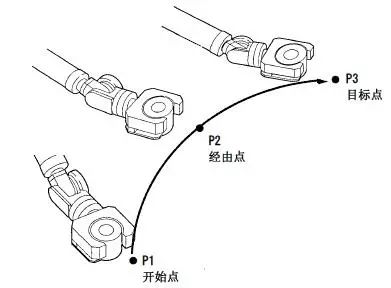
圆弧运动是从运动开始点通过经由点到结束点以圆弧方式运动。其在一个指令中对经由点和目标点进行示教。圆弧移动速度的单位,从mm/sec、cm/min、inch/min、sec 中选择。圆弧运动中的工具姿势可以受到控制。
例:
1:J P[1] 100% FINE
2:C P[2]:P[3] 500mm/sec FINE
-
ABB工业机器人运动指令有哪几个2024-06-16 5954
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3995
-
PDF——工业机器人技术及应用2022-10-16 27520
-
机器人运动控制技术2021-07-28 2372
-
FANUC 工业机器人编程与联网相关资料推荐2021-07-02 1724
-
工业机器人应用编程考核设备分享2021-07-01 2917
-
工业机器人的技术原理2018-11-23 5100
-
零基础玩转工业机器人2018-10-29 5037
-
工业机器人的工作原理2017-12-15 4787
-
六轴工业机器人控制方式2017-08-09 6178
-
《工业机器人》,蒋刚编著的,附下载。2016-06-01 40290
-
如何系统性地学习工业机器人技术?2016-03-06 3498
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32526
-
工业机器人的基本结构2015-01-19 9568
全部0条评论

快来发表一下你的评论吧 !
