

三相无刷电机的结构、工作原理及驱动方法
电子说
描述
三相全波无刷电机的结构
从本文开始,我们将介绍三相无刷电机的结构、三相无刷电机的工作原理及三相无刷电机的驱动方法等内容。首先是三相无刷电机的结构。
三相全波无刷电机的外观和结构
左侧是用来旋转光盘播放设备中的光盘的主轴电机示例。共有三相×3共9个线圈。右侧是FDD设备的主轴电机示例,共有12个线圈(三相×4)。线圈被固定在电路板上,并缠绕在铁芯上。
在线圈右侧的盘状部件是永磁体转子。外围是永磁体,转子的轴插入线圈的中心部位并覆盖住线圈部分,永磁体围绕在线圈的外围。
三相全波无刷电机的内部结构图和线圈连接等效电路
接下来是内部结构简图和线圈连接等效电路示意图。
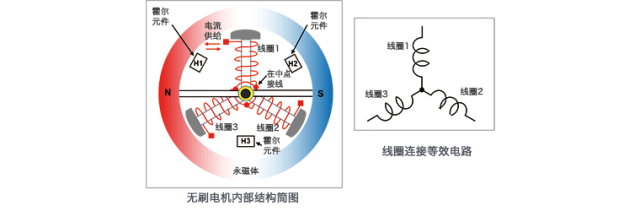
该内部结构简图是结构很简单的2极(2个磁体)3槽(3个线圈)电机示例。它类似于极数和槽数相同的有刷电机结构,但线圈侧是固定的,磁体可以旋转。当然,没有电刷。
在这种情况下,线圈采用Y形接法,使用半导体元件为线圈供给电流,根据旋转的磁体位置来控制电流的流入和流出。在该示例中,使用霍尔元件来检测磁体的位置。霍尔元件配置在线圈和线圈之间,根据磁场强度检测产生的电压并用作位置信息。在前面给出的FDD主轴电机的图像中,也可以看到在线圈和线圈之间有用来检测位置的霍尔元件(线圈的上方)。
霍尔元件是众所周知的磁传感器。可将磁场的大小转换为电压的大小,并以正负来表示磁场的方向。下面是显示霍尔效应的示意图。
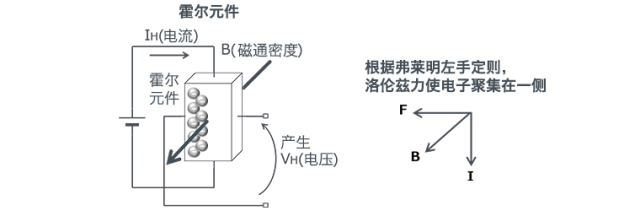
霍尔元件利用了“当电流IH流过半导体并且磁通B与电流成直角穿过时,会在垂直于电流和磁场的方向上产生电压VH”的这种现象,美国物理学家Edwin Herbert Hall(埃德温·赫伯特·霍尔)发现了这种现象并将其称为“霍尔效应”。产生的电压VH由下列公式表示。
VH = (KH / d)・IH・B ※KH:霍尔系数,d:磁通穿透面的厚度
如公式所示,电流越大,电压越高。常利用这个特性来检测转子(磁体)的位置。
三相全波无刷电机的旋转原理
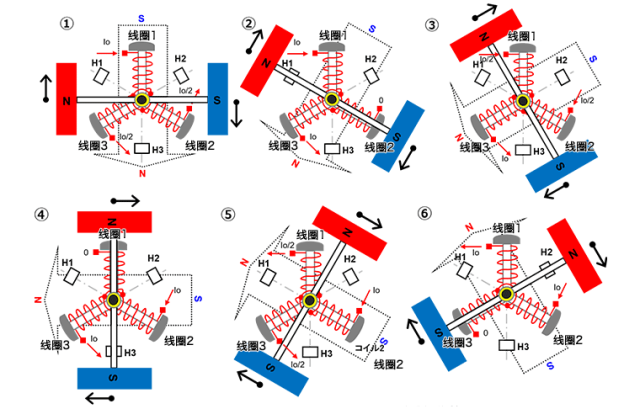
下面将按照步骤①~⑥来说明无刷电机的旋转原理。为了易于理解,这里将永磁体从圆形简化成了矩形。
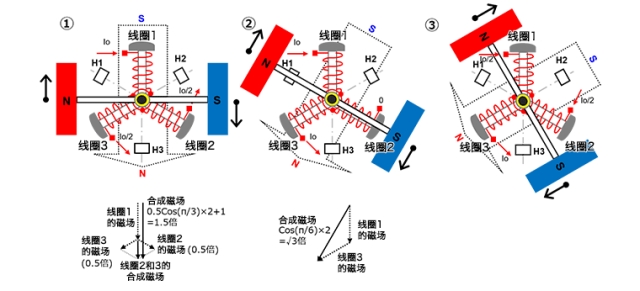
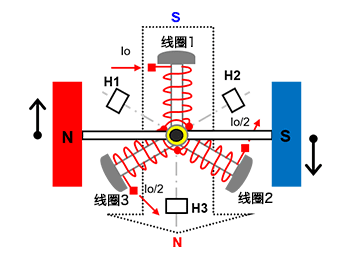
①在三相线圈中,设线圈1固定在时钟的12点钟方向上,线圈2固定在时钟的4点钟方向上,线圈3固定在时钟的8点钟方向上。设2极永磁体的N极在左侧,S极在右侧,并且可以旋转。
使电流Io流入线圈1,以在线圈外侧产生S极磁场。使Io/2电流从线圈2和线圈3流出,以在线圈外侧产生N极磁场。
在对线圈2和线圈3的磁场进行矢量合成时,向下产生N极磁场,该磁场是电流Io通过一个线圈时所产生磁场的0.5倍大小,与线圈1的磁场相加变为1.5倍。这会产生一个相对于永磁体成90°角的合成磁场,因此可以产生最大扭矩,永磁体顺时针旋转。
当根据旋转位置减小线圈2的电流并增加线圈3的电流时,合成磁场也顺时针旋转,永磁体也继续旋转。
②在旋转了30°的状态下,电流Io流入线圈1,使线圈2中的电流为零,使电流Io从线圈3流出。
线圈1的外侧变为S极,线圈3的外侧变为N极。当矢量合成时,产生的磁场是电流Io通过一个线圈时所产生磁场的√3(≈1.72)倍。这也会产生相对于永磁体的磁场成90°角的合成磁场,并顺时针旋转。
当根据旋转位置减小线圈1的流入电流Io、使线圈2的流入电流从零开始增加、并使线圈3的流出电流增加到Io时,合成磁场也顺时针旋转,永磁体也继续旋转。
※假设各相电流均为正弦波形,则此处的电流值为Io × sin(π⁄3)=Io × √3⁄2 通过磁场的矢量合成,得到总磁场大小为一个线圈所产生磁场的(√3⁄2)2×2=1.5 倍。当各相电流均为正弦波时,无论永磁体的位置在哪,矢量合成磁场的大小均为一个线圈所产生磁场的1.5倍,并且磁场相对于永磁体的磁场成90°角。
③在继续旋转了30°的状态下,电流Io/2流入线圈1,电流Io/2流入线圈2,电流Io从线圈3流出。
线圈1的外侧变为S极,线圈2的外侧也变为S极,线圈3的外侧变为N极。当矢量合成时,产生的磁场是电流Io流过一个线圈时所产生磁场的1.5倍(与①相同)。这里也会产生相对于永磁体的磁场成90°角的合成磁场,并顺时针旋转。

④~⑥以①~③相同的方式旋转。
这样,如果不断根据永磁体的位置依次切换流入线圈的电流,则永磁体将沿固定方向旋转。同样,如果使电流反向流动并使合成磁场方向相反,则会逆时针旋转。
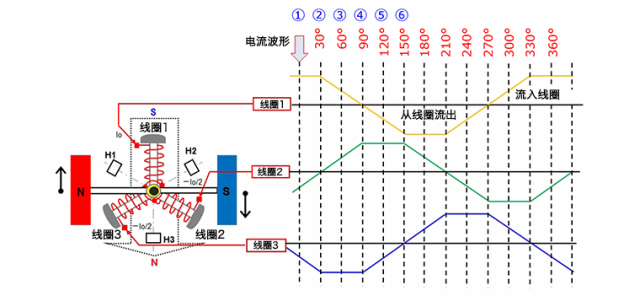
下图连续显示了上述①~⑥每个步骤的每个线圈的电流。通过以上介绍,应该可以理解电流变化与旋转之间的关系了。
关键要点:
・三相全波无刷电机通过三个线圈的电流流入和流出使磁场发生变化,从而使三相全波无刷电机的转子旋转。
三相全波无刷电机的位置检测
在上一篇“三相全波无刷电机的旋转原理”中,介绍了三相全波无刷电机通过三个线圈中的驱动电流切换实现旋转的原理。接下来将介绍三相全波无刷电机的驱动方法,但在此之前会先介绍三相全波无刷电机的位置检测方法,因为在实际的三相全波无刷电机驱动中,需要检测旋转的永磁体的位置。
位置检测的方法主要有两种。一种是使用传感器的方法,这种方法需要使用霍尔元件的电压。虽然在上一篇文章中用来说明旋转原理的图中没有直接解释,但是标出了H1、H2和H3霍尔元件(传感器)。另一种是检测各线圈的感应电压的方法,由于这种方法不使用传感器而被称为“无传感器方法”。
使用霍尔元件的位置检测(有传感器)
使用霍尔元件(传感器)检测旋转的永磁体位置时,将霍尔元件的安装位置设置在线圈和线圈之间的中点,即1/2角度对应的点(参见右图)
假设线圈3与线圈1之间的霍尔元件为H1,线圈1与线圈2之间的霍尔元件为H2,线圈2与线圈3之间的霍尔元件为H3,则顺时针方向旋转的电流波形与霍尔元件的信号波形对比如下(中段波形)。
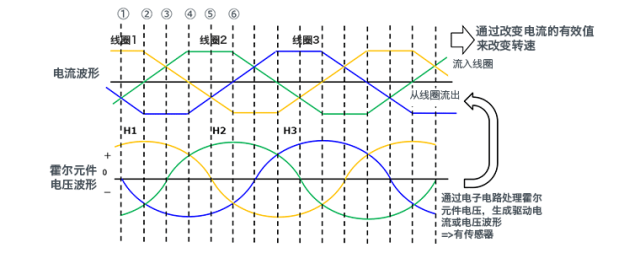
在这个示例中,当对霍尔元件施加N极磁场时产生正(+)电压,当施加S极磁场时产生负
(-)电压,并且磁场的强度根据永磁体的旋转位置以正弦波变化(波形图下半部分“霍尔元
件电压波形”)。各相的输出电流波形为梯形波(波形图上半部分“电流波形”)。波形图时间
轴上的①~⑥的点与上一篇中用来说明“旋转原理”的图中的①~⑥相对应。该图也会在下一节“使用感应电压进行位置检测(无传感器)”中使用。
驱动时,由根据转子位置而变化的霍尔元件输出信号波形合成输出电流波形。合成是由H1电压波形减去H2电压波形,H2电压波形减去H3电压波形,H3电压波形减去H1电压波形。通过这些运算,可以获得相位比H1、H2和H3提前30°的正弦波形(M1、M2、M3)。只要基于这些信号生成输出电流,即可创建用于驱动具有所需相位的电机的电流波形。
要合成用于反转的输出电流信号时,需要从H2中减去H1,从H3中减去H2,从H1中减去H3。也就是说,基于M1=H2-H1、M2=H3-H2、M3=H1-H3,根据M1、M2和M3的组合波形的相位提供输出电流,即可实现反转。
使用感应电压进行位置检测(无传感器)
这是不需要传感器(霍尔元件)的方法,使用的是线圈中产生的感应电压。在三相全波无刷电机中,永磁体相对于线圈旋转,N极和S极交替变化,所以线圈的磁通密度发生变化,线圈自身发电并产生感应电压。当磁极N在线圈端时,进入线圈方向的磁通密度最高;当磁极S在线圈端时,从线圈出来的方向的磁通密度最高。然而,当永磁体的磁化波形为正弦波状时,磁通密度的变化在N极和S极之间的中点处最大。
上图与上一篇“旋转原理”中使用的图片相同,三相全波无刷电机①~⑥的状态对应于下面波形图中的时间轴①~⑥。
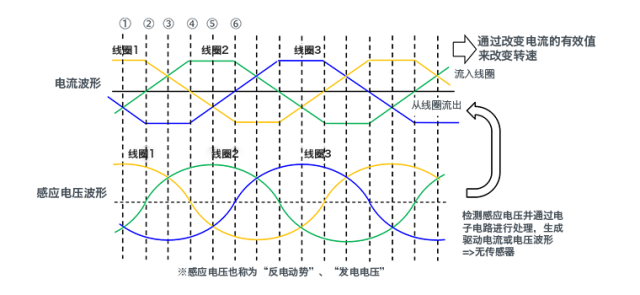
下面对三相全波无刷电机①~⑥的状态与感应电压波形之间的关系进行说明。
①:线圈1位于S极和N极之间的中点,由于S极产生的磁通从线圈外侧出来的工作变为N极产生的磁通进入线圈的工作,因此磁通密度的变化最大。所以线圈1的感应电压相对于线圈中点是正电压,且最大。
②:由于磁通密度的变化比之前略小,因此线圈1的感应电压降低。
③:由于通往线圈1的磁通密度的变化进一步变小,因此感应电压也进一步降低。
④:由于N极在线圈端,磁通密度的变化变为零,所以线圈1的感应电压变为零。
⑤:由于N极逐渐远离线圈1,进入线圈的磁通量逐渐减少,因此感应电压变为负值,磁通量变化小,故感应电压略有下降。
⑥:由于通往线圈1的磁通密度的变化进一步变小,因此感应电压也进一步降低。
同样,线圈2和线圈3在从S极切换到N极的中点产生最高的正感应电压,在从N极切换到S极的中点产生最高的负感应电压,当N极和S极位于线圈端时,感应电压变为零。
另外,如波形图所示,各线圈的感应电压波形与其驱动电流波形的相位相同。
通过检测感应电压的零点并合成输出电流波形,可以将感应电压用作转子的位置检测信号,使电机旋转,因此无需使用位置检测用的霍尔元件即可进行控制。
从下一篇开始,将会介绍实际的驱动方法。
关键要点:
・三相全波无刷电机的位置检测方法有两种:三相全波无刷电机使用霍尔元件的方法和三相全波无刷电机不使用霍尔元件而使用电机线圈的感应电压的方法。
三相全波无刷电机的驱动:有传感器、120度激励线性电流驱动
从本文开始,将介绍三相全波无刷电机的驱动。三相全波无刷电机通常通过控制和驱动电路给电机激励来实现驱动。三相全波无刷电机驱动的激励方式有120度激励驱动和正弦波激励驱动两种。三相全波无刷电机驱动的每种方式都有其优缺点。总体上来看,正弦波驱动在控制精度、效率和噪声方面具有优势,但缺点是会增加系统的复杂性和成本。而120度激励驱动虽然在控制精度、效率和噪声方面不及正弦波驱动,但系统更简单,在成本方面也更具优势。后续将会详细介绍三相全波无刷电机驱动的每种激励方式,首先来看有传感器的120度激励线性电流驱动。
三相全波无刷电机的驱动:有传感器、120度激励线性电流驱动
120度激励驱动通过由高边和低边开关组成的驱动器所具备的三相控制和驱动电路来实现驱动。下面根据120度激励驱动的驱动电路示例和各输入输出波形图对这种驱动方式进行说明。
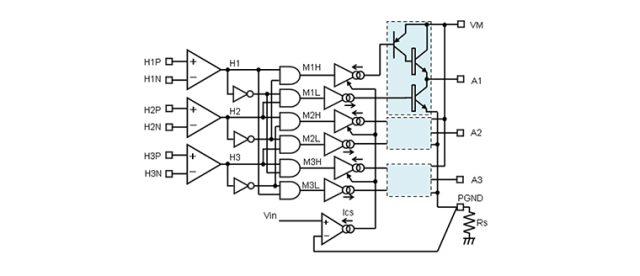
先看各线圈的电流波形。各线圈在各相位差120度的状态下,在120度期间导通并使电流流入线圈,在60度期间关断,并在120度期间导通使电流流出,再在60度期间关断,并重复这样的周期循环(垂直虚线每格增量为30度)。这个激励期间为120度,故被称为“120度激励”。
驱动电路的H1P/H1N~H3P/H3N表示霍尔元件电压的输入,以差分方式接收来自霍尔元件的信号(参见波形图“霍尔元件电压波形”)。
霍尔元件电压被差分放大器转换为矩形(参见矩形波形H1~H3)。
通过下一级的逻辑运算,被转换为矩形的波形成为各高边开关(晶体管)和低边开关的驱动信号,并通过电流驱动放大器驱动高边和低边开关(参见合成波形M1H/M1L~M3H/M3L、线圈1~3电流波形)。
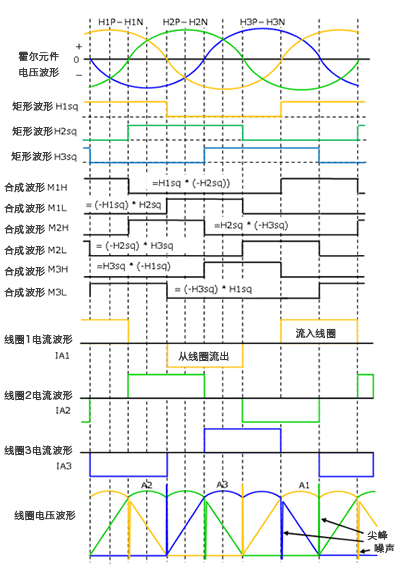
简单地讲,在线圈电流关断的60度期间不会产生线圈电压,但实际上电机在旋转,线圈会产生感应电压,因此关断期间会产生上升和下降斜坡电压,在线圈电流会产生急剧变化的点,产生箭头所示的尖峰噪声样电压。
在下一篇文章中将会介绍三相全波无刷电机的驱动的另一个激励方式:正弦波激励驱动。
关键要点:
・在三相全波无刷电机的驱动的120度激励驱动中,是通过各相位差120度、并反复进行“120度导通(H)、60度关断、120度导通(L)、60度关断”的循环来实现在三相全波无刷电机驱动的。
三相全波无刷电机的驱动:有传感器、正弦波激励PWM驱动
继上一篇“三相全波无刷电机的120度激励线性电流驱动”之后,本文将介绍“三相全波无刷电机的正弦波激励PWM驱动”。在上一篇文章中也提到过,三相全波无刷电机的激励方式有120度激励驱动和正弦波激励驱动两种。相比120度激励驱动,三相全波无刷电机的正弦波激励驱动在控制精度、效率、噪声等方面更具优势,但在系统的复杂性和成本方面,三相全波无刷电机的矩形波驱动更胜一筹。
三相全波无刷电机的驱动:有传感器、正弦波激励PWM驱动电路示例
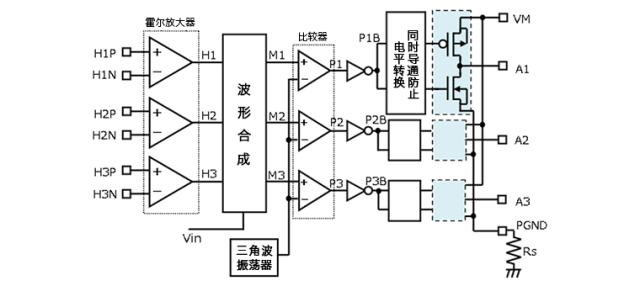
正弦波激励驱动通过由高边和低边开关组成的驱动器所具备的三相控制和驱动电路来实现驱动。以下是带有传感器的正弦波激励PWM驱动的电路框图和各输入输出波形图示例。其基本工作是将来自三个霍尔传感器的信号输入至霍尔放大器的输入端,经过波形合成的信号通过比较器和三角波转换为PWM信号,由输出段MOSFET来驱动电机的线圈。A1、A2、A3的PWM信号的等效电压为120度相位差的正弦激励波形。120度激励是120度导通60度关断的矩形波激励方法,但正弦波驱动则是180度激励,由于是通过正弦波对零到最大值实施激励,因此工作更平稳,噪声更低。另外,PWM还有助于提高效率。
三相全波无刷电机的驱动:有传感器、正弦波激励PWM驱动波形示例
下面使用各波形示例进行详细说明,先来了解正弦波PWM转换。
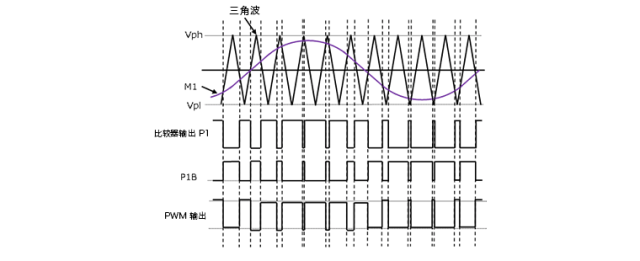
以前面框图中的H1P/H1N输入通道为例。霍尔放大器的输出H1通过波形合成电路变为图中紫色的正弦波M1。来自M1和三角波振荡器的三角波被输入比较器,作为比较结果,输出具有脉冲宽度的矩形波P1(比较器输出)。P1是通过电平转换和同时导通防止电路来控制输出段MOSFET的栅极,从而驱动电机线圈的PWM输出。这种使用比较器和三角波的PWM转换是很常见的方式,并且是很多电路中使用的方法,比如开关稳压器的PWM生成等。接下来,请看各输入输出波形。
霍尔元件电压的输入H1P/H1N~H3P/H3N,是以差分方式接收来自霍尔元件的信号,并输出H1~H3相位差120度的正弦波(参见波形图“霍尔元件电压波形”)。霍尔元件电压通过波形合成电路成为M1~M3。此时,以比原始相位超前30度以上的相位生成各波形(参见“合成波形”)。称为“超前角”的概念将会另行详细介绍。如前所述,M1~M3通过比较器与三角波进行比较并被转换为PWM信号(参见“比较器波形P1~P3”)。电机线圈的电压波形是PWM信号,但波形图中显示的是等效电压波形。可以看出等效电压波形是正弦波驱动。
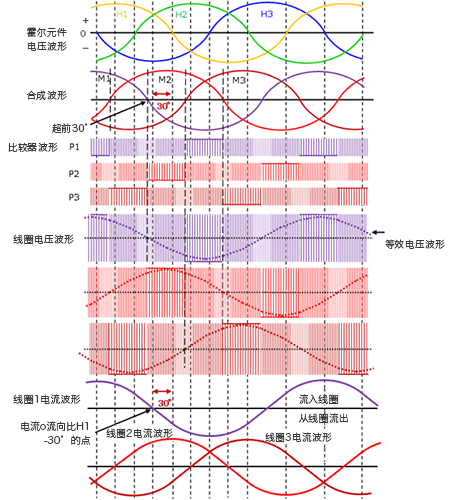
当然,线圈电流是正弦波。通过波形合成电路使相角超前,从而使线圈电流波形的相角总是比霍尔元件电压(H1~H3)超前30度。这一系列的控制称为“超前角控制”。120度激励时,在线圈电压波形中看到有线圈电流的ON/OFF引起的尖峰噪声,但在正弦波激励驱动时,由于是180度激励,没有ON/OFF,因此不会发生尖峰噪声。下一篇计划介绍超前角控制的相关内容。
关键要点:
・三相全波无刷电机的正弦波激励PWM驱动是各相位差为120度的正弦波驱动。・三相全波无刷电机的正弦波激励PWM驱动由于不会像三相全波无刷电机的120度激励驱动那样产生尖峰噪声而在噪声方面更具优势。・三相全波无刷电机的正弦波驱动通过PWM驱动实现高效率。
总结:三相全波无刷电机的特征与用途
三相全波无刷电机的特征
下表从优点和缺点的角度总结了三相全波无刷电机的特征。加粗的部分是尤为重要的要点。
| 优点 | 缺点 |
|
・电气噪声和机械噪声小 ・可靠性高,寿命长 ・容易提高速度 ・效率高 ・易于小型化和设计成各种形状 ・旋转速度与施加电压成正比 ・旋转速度与负载成正比下降 ・启动时和低速时的转矩大 ・转矩与电流成正比 ・主要特性呈线性变化,易于控制 |
・转子是永磁体,因此转动惯量无法减小 ・整流功能需要复杂的电子电路和传感器,成本更高 ・驱动电路和电机间需要较多布线 ・容易发生转矩波动(线圈有铁芯时) |
三相全波无刷电机的用途示例
下表中总结了三相全波无刷电机在典型设备中的应用示例。除此之外还有其他多种用途,这里只是部分示例
| 设备 | 应用示例 |
| HDD | ・主轴:磁盘的旋转 →三相无传感器 |
|
电脑/游戏机用DVD/蓝光驱动 蓝光刻录机/播放器 |
・主轴:磁盘的旋转 →三相无传感器 |
|
激光打印机(LBP) PPC |
・进纸 →三相有传感器 ・多棱镜:激光扫描用多面镜旋转 →三相有传感器、三相无传感器 |
| 直流风扇 | →双相半波无刷、单相全波无刷、三相无传感器 |
| 无人机 |
・螺旋桨 →三相无传感器 ・云台控制:相机方向固定 →三相无传感器 |
| 工具 | ・驱动器、・电钻、・电锯等:旋转 →三相有传感器 |
| 家电 |
・空调:压缩机、风扇(室内机/室外机)、・空气净化器 ・吸尘器、冰箱(压缩机、风扇)等 |
| 汽车电气/电子设备 |
・空调:风扇、・电池冷却风扇 ・座椅:风扇、气泵等 |
关键要点:
・三相全波无刷电机最大的优点是没有电刷,因此电气噪声和机械噪声很小,可靠性高,寿命长。
・三相全波无刷电机的缺点是整流功能需要复杂的电子电路和传感器,成本更高。
审核编辑:汤梓红
-
MS4931——三相无刷电机驱动2024-11-07 3470
-
三相无刷电机的工作原理及优势2024-09-11 2919
-
MS4931三相无刷电机驱动系统:全自动电刨设备的应用2024-09-10 3644
-
三相电机的工作原理和特点2024-06-26 9218
-
三相全波无刷电机驱动的每种激励方式介绍2023-03-07 2293
-
三相电机的工作原理 三相电机的特点2023-03-06 16824
-
三相全波无刷电机的位置检测2023-02-24 3363
-
三相全波无刷电机的结构2023-02-23 2412
-
三相交流电机的工作原理是什么2021-07-29 2145
-
如何对三相无刷电机驱动器进行仿真?2021-07-21 1762
-
三相鼠笼式电机工作原理及结构2019-10-09 46567
-
三相直流无刷电机驱动板设计2016-05-05 2018
全部0条评论

快来发表一下你的评论吧 !
