

机械臂抓取从入门到实战课程
描述
01机器人抓取介绍目前机器人作为智能制造的重要组成部分,已经广泛应用于各行各业。但是大部分机器人都是通过示教过程实现生产制造的,编程简单快捷,不需要考虑复杂的轨迹规划,这样往往只能重复对固定位置的物体进行搬运或抓取,无法实现真正的智能化操作。随着工业智能化改造的不断深入,许多企业进行产线升级,逐渐将机器视觉技术引入生产制造过程中,应用于生产线对物料校准和定位,将视觉系统作为机器人对外界环境感知的一种辅助定位系统,就像给工业机器人装上了眼睛,采集场景信息,由控制器进行处理、判断,进而完成对应的控制指令。
机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地抓取模型已知或未知的物体。其中机器人平面抓取是指限制机器人垂直桌面抓取,即为RPY角中的Roll和Pitch设为定值,抓取算法只需预测(x, y, z, yaw, width)。其中(x, y)为RGB图像或者深度图中的像素点位置,z为深度相机对应抓取点距离相机的深度,yaw表示机械手沿z轴的旋转角,或机械手闭合方向与图像水平轴的夹角;width表示机械手张开宽度。相对于6DOF位姿估计抓取算法,平面抓取算法使用更简单的深度学习模型可以优化预测速度,提高抓取成功率。下列为机器人抓取任务的工业现场图:
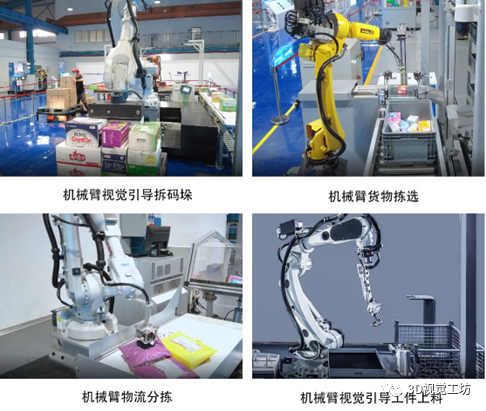
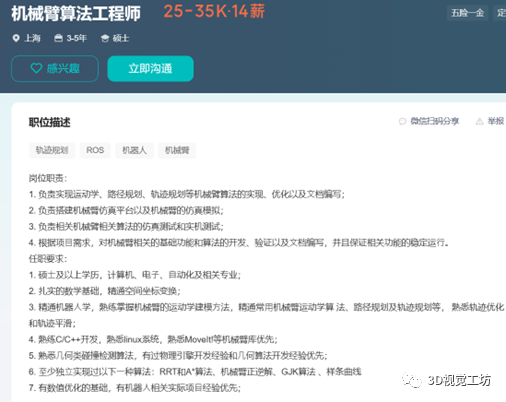
目前,各个大厂如美的库卡、小米、华为、亚马逊、谷歌等均在大力发展机器人结合视觉抓取在物流运输、智能制造等领域的应用。在《中国制造2025》和“十三五规划”等政策推动下,由“中国制造”到“中国智造”已是必然趋势,行业外部发展环境利好,内部资本实力雄厚、薪酬可观,且不存在中年危机等互联网企业通病,是目前理想的就业方向。以下是某招聘网站发布的招聘需求和薪资待遇:

02如何学习
机器人平面抓取任务已广泛应用于各行各业,如服务机器人,机器人搬运、分拣、上料等。然而由于机器人抓取任务不仅包含视觉算法,也需要熟悉机器人的建模、运动学、轨迹生成、路径规划等原理,知识点繁多复杂,因此不论是高校、科研院所或者是企业都尚未形成完整的知识体系。对于想学习机器人抓取的学员,只能依靠网络上零散无序的知识片段拼凑学习,时间利用率极低。
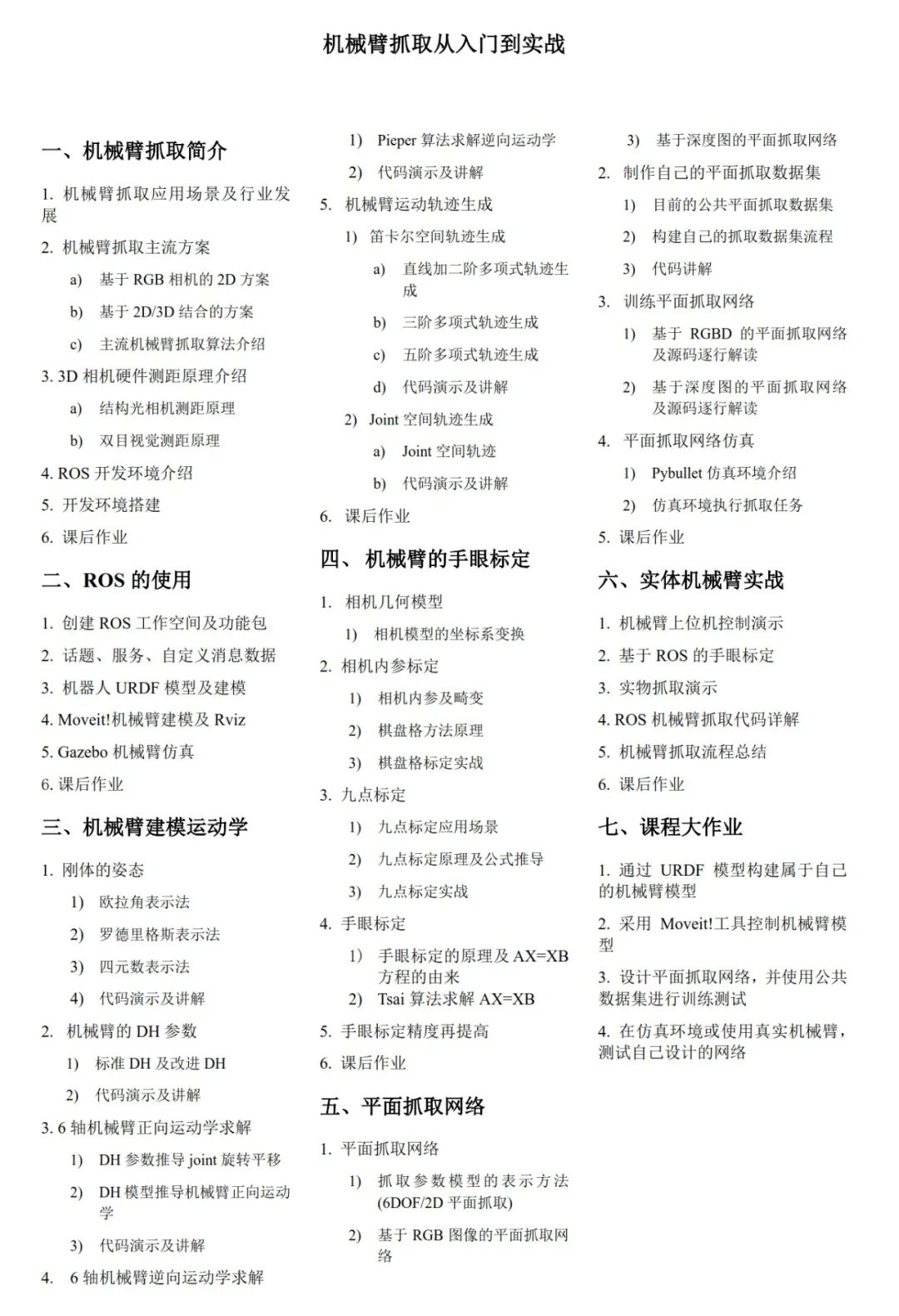
为此,我们推出了机器人抓取课程,授课老师为某头部智能制造公司的视觉算法工程师,具备扎实的机器人和视觉理论知识,拥有丰富的实战经验。课程将会在环境配置,ROS基础,机器人基础,平面抓取网络,机器人抓取实战等方面进行详细展开。无论是理论基础还是实践应用,都可以使初学者或具有一定经验的从业者从中受益,课程大纲如下:
审核编辑 :李倩
-
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取2026-04-10 301
-
深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的?2025-01-15 1773
-
【全新课程资料】正点原子《ESP32基础及项目实战入门》培训课程资料上线!2024-09-24 2833
-
javaweb从入门到实战2023-12-03 2434
-
什么是相机标定?视觉机械臂自主抓取全流程2023-08-15 7812
-
基于深度强化学习的视觉反馈机械臂抓取系统2023-06-12 4752
-
应用案例 | 当机械臂抓取物料时,如何精准拿捏尺度?2023-05-17 3873
-
如何去开发一款基于RGB-D相机与机械臂的三维重建无序抓取系统2021-09-08 2248
-
基于YOLOv3等的机械臂药盒智能抓取方法2021-06-23 1267
-
【瑞芯微RK1808计算棒试用申请】机械臂快速识别抓取系统2019-09-23 2024
-
如何使用深度强化学习进行机械臂视觉抓取控制的优化方法概述2018-12-19 4099
-
2017威哥Java教程视频全集——从入门到精通(基础课程+项目实战)2017-09-06 7592
-
从工业到医疗再到太空机器人 机械臂都有什么不同?2016-12-13 4558
-
臂- 手系统主动抓取策略及仿真2009-07-11 612
全部0条评论

快来发表一下你的评论吧 !
