

如何用PID指令如何编写PID程序
电子说
1.4w人已加入
描述
PID程序除了可以用PID向导组态的方法编写,还可以利用PID指令进行编写,指示程序稍微繁琐些,如果自己编写程序可以选用向导完成,但是如果调试修改别人用PID指令编写的程序,就必须要学会用指令编写。
在目录树>浮点运算>PID调出PID运算指令如下图:
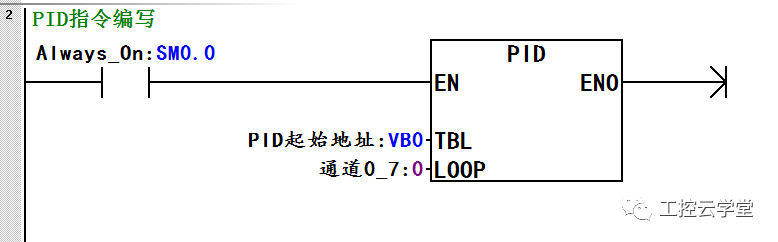
LOOP:PID运算通道号。可以设成0-7共八个PID回路。
TBL:PID回路起始地址,共分配80个字节。常用地址分配表如下表,更多地址分配参看帮助中PID回路定义表:

定义过程变量输入PV,由上表可知缓存在地址VD0中,模拟量传感器将外部温度检测成4-20ma电流信号输给模拟量输入模块变换成5530-27648数值,利用模拟量换算库I_to_R将输入模块检测的数值5530-27648换算成0.0-1.0存储到VD0中,如下图所示:

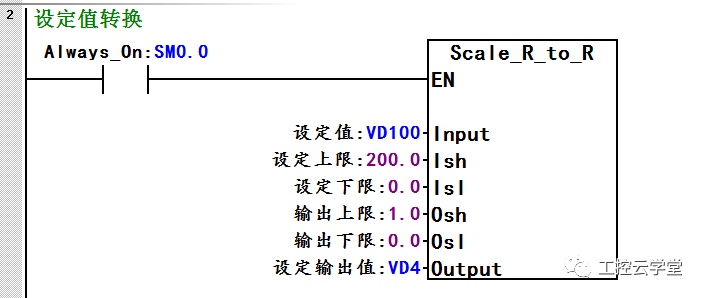
定义设定值,缓存在地址VD4中,利用模拟量换算库R_to_R将设定温度0-200摄氏度范围换算成0.0-1.0范围的浮点数存放到VD4中,如下图所示:
PID输出值转换,PID运算后输出值缓存在地址VD8中,输出值为0.0-1.0范围的浮点数,利用模拟量换算库R_I将输出值0.0-1.0范围的浮点数转换成5530-27648范围的整数赋给AQW16再变换成模拟量控制外部设备,如下图:

最后根据参数定义表找到增益 (P)VD12,采样时间 (T S )VD16,积分时间或复位 (I)VD20,微分时间或速率 (D)VD24,设置好采样时间,再通过调节PID参数使系统趋向稳定。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何用Labview实现PID控制2012-04-25 4264
-
公式节点编写PID2017-08-26 2685
-
怎样去编写PID算法的控制程序?2021-07-27 1627
-
如何用PID的串级控制来控制电机?2021-12-21 1629
-
PID控制算法仿真与控制2009-07-01 997
-
PID程序设计实验2009-05-17 1350
-
pid算法_什么是pid算法2012-01-01 12153
-
pid算法程序2015-11-12 809
-
PID的MATLAB程序2015-11-13 542
-
PID算法Matlab仿真程序和C程序2015-11-20 1251
-
PID源程序2016-11-17 656
-
PID指令_程序算法_温度、压力模拟量控制_触摸屏_源程序2016-11-05 652
-
C51单片机的PID程序编写2018-12-04 6543
-
逆变电源PID程序2021-07-26 1127
-
就增量式PID的函数进行编写2022-06-17 3066
全部0条评论

快来发表一下你的评论吧 !
