

什么是深度学习中优化算法
电子说
描述
先大致讲一下什么是深度学习中优化算法吧,我们可以把模型比作函数,一种很复杂的函数:h(f(g(k(x)))),函数有参数,这些参数是未知的,深度学习中的“学习”就是通过训练数据求解这些未知的参数。
由于这个函数太复杂了,没办法进行直接求解,所以只能换个思路:衡量模型的输出与真实标签之间的差距,如果差距过大,则调整模型参数,然后重新计算差距,如此反复迭代,直至差距在接受范围内。
深度学习中通过目标函数或者损失函数衡量当前参数的好坏,而调整模型参数的就是优化算法。
所谓优化, 就是利用关于最优解的信息,不断逼近最优解, 目前深度学习中最常用的是梯度下降法, 梯度方向就是最优解的信息,因为梯度方向指向最优解方向, 沿着梯度方向前进即可靠近最优解。
到这里,你是不是觉得优化算法很简单?其实,不然。让我们进一步分析。
难点一:梯度(困难指数两颗星)
所谓梯度下降法,当然要计算梯度,前面那个复合函数再加上损失函数,最终要优化的函数是这个样子:L(h(f(g(k(x)))),y),L是损失函数,y是标签值。
复合函数通过链式法则进行求导,例如f(g(x)),

这就要求g(x)和f(x)都得可导,对于神经网络而言,卷积层和全连接层都可以看作是矩阵与向量乘法,是可导的,剩下的就是激活函数和损失函数,好在目前常用的MSE,交叉熵损失函数,Sigmoid,Relu激活函数都是可导的。
所以,梯度的问题不大。
难点二:凸优化和非凸优化( 困难指数五颗星 )
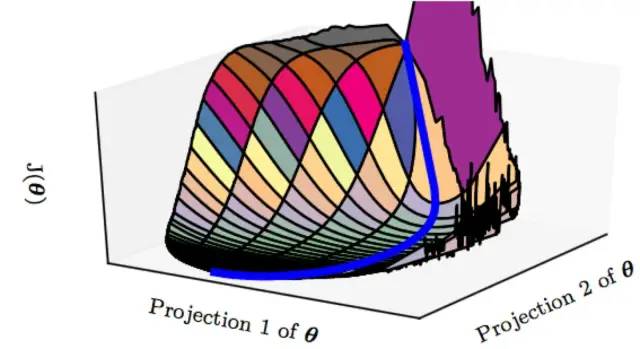
深度学习由于多个隐藏层的叠加所形成的复合函数,外加损失函数,最终的函数往往不是凸函数。
所谓凸函数,就是只有全局最优解,通过梯度下降最终都能找到这个最优解,对于机器学习中的线性回归的损失函数:最小二乘而言,它是一个凸函数,也就是说能找到使损失函数达到最小值的全局最优解。
在非凸函数中,存在大量的局部最优解,局部极值随着特征维度的增加呈指数增长,优化算法很大概率找不到全局最优解,这也是优化算法最苦恼的地方。
如果只有局部最优解,那情况还不算最糟糕,毕竟局部最优解意味着从所有维度看都是最小值或者最大值,更糟糕的是鞍点,这种情况虽然一阶导数都为零,但二阶导数不同向,也就是说从某些维度看是极小值,而从某些维度看却是极大值。
而且,不幸的是,随着特征向量维度的增加,鞍点的数量也是随着指数级增加的。
那如何逃离鞍点?
这里再次注意:这里我们所说的梯度下降指的是:使用全部样本的损失的平均值来更新参数,这就意味着梯度的精度非常高,会精确地逼近鞍点,但我们不希望这样,我们希望能够跳出鞍点,幸好,随机梯度下降SGD或者其变体(比如Momentun、Adam、mini-batch)的出现很大程度上解决了该问题。
例如,mini-batch是指每次参数更新只是用一小批样本,这是一种有噪声的梯度估计,哪怕我们位于梯度为0的点,也经常在某个mini-batch下的估计把它估计偏了,导致往前或者往后挪了一步摔下马鞍,也就是mini-batch的梯度下降法使得模型很容易逃离特征空间中的鞍点。
既然,局部极值点也可接受,且又能有方法逃离鞍点,到这里你觉得问题就结束了吗?还没有,其实,神经网络中最让人望而生畏的不是局部最优点和鞍点,而是平坦地区,这些地区一经进入很难逃离。
总结来说,人们认为的深度神经网络“容易收敛到局部最优”,很可能是一种想象,实际情况是,我们可能从来没有找到过“局部最优”,更别说全局最优了。
所以,与其担忧陷入局部最优点怎么跳出来,更不如去考虑数据集要怎么做才能让网络更好学习,以及网络该怎么设计才能更好的捕获pattern,网络该怎么训练才能学到我们想让它学习的知识。
最后,也要为优化算法鸣个不平。其实这并不是优化算法的问题。是损失函数和网络结构的错,是他们的复杂性导致优化问题是一个非凸优化问题,优化算是是来解决问题的,而不是制造问题。
-
NPU在深度学习中的应用2024-11-14 3702
-
深度学习算法在嵌入式平台上的部署2024-07-15 5026
-
深度学习编译工具链中的核心——图优化2024-05-16 2605
-
目前主流的深度学习算法模型和应用案例2024-01-03 3821
-
深度学习算法简介 深度学习算法是什么 深度学习算法有哪些2023-08-17 10955
-
从浅层到深层神经网络:概览深度学习优化算法2023-06-15 1729
-
PyTorch教程-12.1. 优化和深度学习2023-06-05 1260
-
深度学习算法进行优化的处理器——NPU2022-10-17 3621
-
深度模型中的优化与学习课件下载2021-04-07 1355
-
深度学习中多种优化算法2020-08-28 3392
全部0条评论

快来发表一下你的评论吧 !
