

FPGA学习-基于FPGA的图像处理
描述
1 //矩阵元素移位赋值
2 always @(posedge clk or negedge rst_n)begin
3 if(rst_n==1'b0)begin
4 {p_11,p_12,p_13} <= {5'b0,5'b0,5'b0} ;
5 {p_21,p_22,p_23} <= {15'b0,15'b0,15'b0};
6 {p_31,p_32,p_33} <= {15'b0,15'b0,15'b0};
7 end
8 else begin
9 if(per_href_ff0==1&&flag_do==1)begin
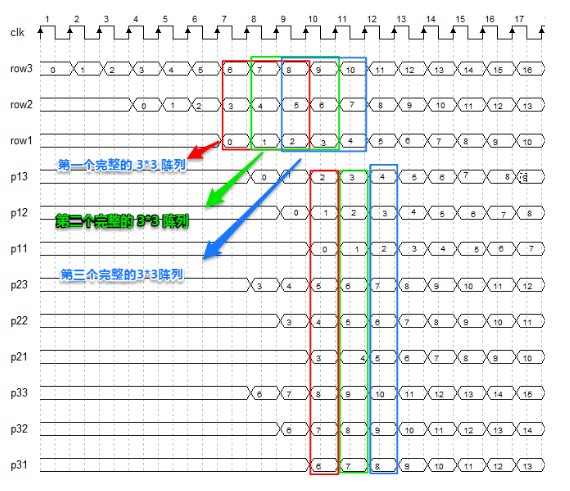
10 {p_11,p_12,p_13}<={p_12,p_13,row_1};
11 {p_21,p_22,p_23}<={p_22,p_23,row_2};
12 {p_31,p_32,p_33}<={p_32,p_33,row_3};
13 end
14 else begin
15 {p_11,p_12,p_13}<={5'b0,5'b0,5'b0};
16 {p_21,p_22,p_23}<={5'b0,5'b0,5'b0}
17 {p_31,p_32,p_33}<={5'b0,5'b0,5'b0}
18 end
19 end
20 end
21
22
23 always @(posedge clk or negedge rst_n)begin
24 if(rst_n==1'b0)begin
25 mean_value_add1<=0;
26 mean_value_add2<=0;
27 mean_value_add3<=0;
28 end
29 else if(per_href_ff1)begin
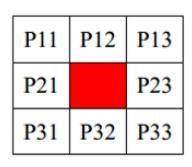
30 mean_value_add1<=p_11+p_12+p_13;
31 mean_value_add2<=p_21+ 0 +p_23;
32 mean_value_add3<=p_31+p_32+p_33;
33 end
34 end
35
36 wire [8:0]mean_value;//8位数之和
37 wire [5:0]fin_y_data; //平均数,除以8,相当于左移三位。
38
39 assign mean_value=mean_value_add1+mean_value_add2+mean_value_add3;
40 assign fin_y_data=mean_value[8:3];
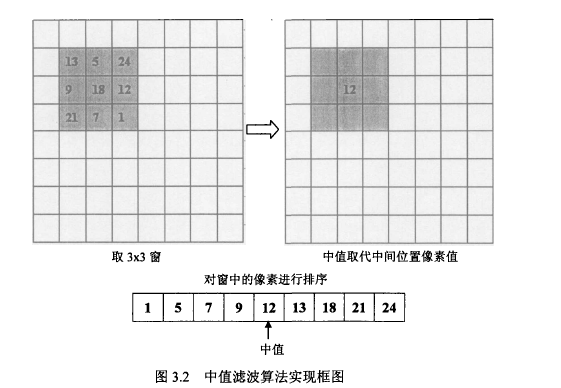
中值滤波


欢迎加入至芯科技FPGA微信学习交流群,这里有一群优秀的FPGA工程师、学生、老师、这里FPGA技术交流学习氛围浓厚、相互分享、相互帮助、叫上小伙伴一起加入吧!
点个在看你最好看
原文标题:FPGA学习-基于FPGA的图像处理
文章出处:【微信公众号:FPGA设计论坛】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- FPGA
-
FPGA 实时信号处理应用 FPGA在图像处理中的优势2024-12-02 3062
-
FPGA设计经验之图像处理2024-06-12 3380
-
FPGA图像处理应用详细介绍2022-02-28 1193
-
FPGA中如何使用Verilog处理图像2021-09-23 7937
-
【FPGA学习案例分享】基于FPGA的图像边缘检测例程2019-11-29 2906
-
略谈FPGA图像处理2018-05-09 4738
-
在FPGA上进行图像处理及其示例2017-11-17 20035
-
基于FPGA和DSP的高速图像处理系统2017-10-19 1225
-
FPGA图像处理2016-12-14 1090
-
基于FPGA的小波图像实时处理方法2016-09-22 812
-
基于FPGA的图像采集与处理2016-03-04 1195
-
FPGA视频图像处理的学习2015-07-28 5382
-
关于fpga的图像处理2013-04-12 3671
-
基于DSP和FPGA的通用图像处理平台设计2010-02-01 1811
全部0条评论

快来发表一下你的评论吧 !
