

简单阐述多旋翼飞行器的系统辨识
电子说
描述
“ 本文主要讲多旋翼飞行器的系统辨识,简单阐述几个概念。还是从一个有意思的话题说起,就是目前市面上的多旋翼飞控厂家在设计控制系统的时候,都是简单粗放的调节PID参数吗?答案肯定不是,至少一些大厂,如DJI等,在设计控制器,包括验证控制器性能的时候,绝不是简单调调PID参数、看看时域的波形就结束了。理论上要想量化控制器的优劣设计,少不了对飞行器进行系统辨识,而这方面,基本上很少有厂家会去做。因素有很多,如精细化设计的需求本身、工程师的水平等。”
01、系统辨识到底有什么用?
首先是,飞行器领域的系统辨识到底有什么作用?总结起来就是大致以下几点: (1)对飞行器本身进行稳定性分析; (2)飞行器的操纵特性分析; (3)飞行仿真(仿真模型构建、物理建模验证与改进); (4)指导飞行控制算法设计(根轨迹法),基于模型的控制算法设计; (5)控制器性能验证(带宽、相位滞后、稳定裕度),定量分析控制算法设计的优劣。
02、系统辨识模型有哪些?
主要分为参数化模型和非参数模型。参数化模型就是传递函数(单输入单输出)和状态空间模型(多输入多输出),非参数模型就是脉冲响应和频率响应。 上述两种有何区别? 首先参数化模型是以非参数模型作为前提的,从中辨识出参数化模型。它需要做很多假设,比如模型阶次、运动方程的结构、参数初始值等。从这个意义上来说,实际还是非参数化模型用的多,主要就是频率响应。它可以迅速的帮我们了解系统,理解一些关键问题。
03、频率响应法的优点?
1. 可利用相干函数来作为辨识精度的指标; 2. 能准确找到系统的时间延迟; 3. 开环频率响应能确定系统穿越频率、增益裕度、相角裕度,闭环频率响应能确定指令的跟踪性能,包括带宽等。
04、手动操纵是否可以?
一般来说,都是由飞手进行手动操纵。然而,实际应用中,扫频取数据也是一个技术活,绝不是飞手简单左右打打杆就能做好的。 随便举几个例子,如打杆的幅值多大比较好?输入的幅值太小,那响应的幅值就小,信噪比低,辨识精度下降;输入的幅值太大,飞行器运动会偏离参考配平状态很多,这样线性模型的假设就失效了。数据记录长度多长?输入信号的频率范围是什么样?等等。
05、怎么避免手动操纵带来的误差?
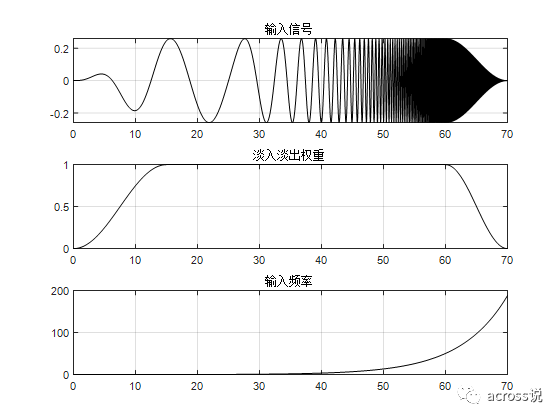
解决方案也简单,就是设计一种飞行模式,输入信号由计算机自动生成,这样飞手操作的影响就小很多。 如何设计扫频信号?几个关键指标,频率范围,输入幅值,淡入淡出时间,日志记录时间。频率范围要确保对应的频率响应在模型应用频率范围内,多旋翼飞行器为例的话,大概在0.5~188rad/s,即0.08~30Hz。在辨识的时候,开始与结束阶段输入为零,保证稳态;淡入淡出时间设计,保证开始或结束的时候输入信号过于尖锐。 下面给出一组信号的仿真结果:
日志记录时间:70s;
频率范围:0.08-30Hz;
幅值:0.26rad/s;
淡入时间:15s;
淡出时间:10s;
06、多旋翼本体模型辨识的特殊性
固定翼本体模型辨识,可以直接无反馈控制飞行器飞行,输入为舵面,输出为某通道的角速度,因此可以做理想情况下的无控制增稳系统开环辨识。但是多旋翼比较特殊,无控制增稳系统,没办法直接飞行,因此只能是控制增稳系统接入(即闭环)的情况下进行辨识。 闭环实验的缺点是控制增稳系统会抑制手动操纵的低频输入信号,导致信噪比低,进而低频段的辨识精度下降。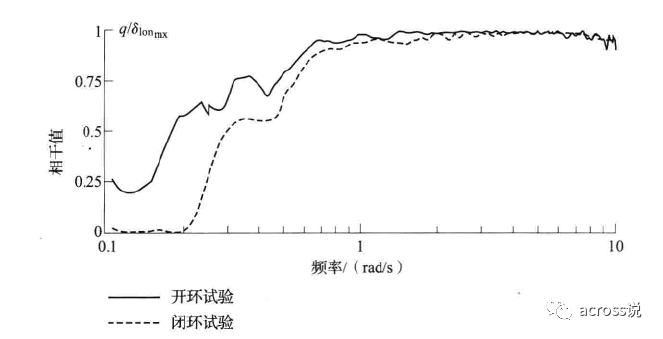
还有一个问题是,控制输入会包含干扰响应,导致本体模型估计出现偏差。 解决办法是:控制器增益尽量小,扫频的输入与干扰输入的比值合理。
审核编辑:刘清
-
四旋翼飞行器控制模型2021-09-15 1369
-
多旋翼飞行器设计与控制的基本组成2021-09-14 1087
-
浅析四旋翼飞行器2021-08-06 2643
-
多旋翼无人机飞行器的入门学习资料和实践说明2019-11-04 2127
-
多旋翼飞行器设计与控制2019-07-11 5075
-
多旋翼自主飞行器(C题)2015-08-12 10217
-
【MiCOKit申请】基于物联网的四旋翼飞行器2015-07-31 2682
-
四旋翼飞行器的设计2013-11-28 15060
-
旋翼式微型飞行器升力系统设计2009-12-29 636
全部0条评论

快来发表一下你的评论吧 !
