

围绕ADAS域控制器的关键器件进行简要分析
描述
佐思汽研对当前国内主流的高算力ADAS域控制器产品和技术信息进行了研究汇总,如华为MDC、大疆ADAS域控样机等。
本文将围绕ADAS域控制器的CPU、MCU、存储、接口等关键器件进行简要分析。
01 CPU
在CPU选型上,各家域控制器为达到NOP/NGP等L2+级高阶ADAS功能,均在追求大算力芯片,目前应用较多的是英伟达Xavier和Orin。
英伟达的Xavier和Orin都内置立体双目硬核加速,可以直接硬线输出视差图(Disparity map),还有光流加速模块,立体双目的光流效果比单目好很多,对立体双目企业来说,最核心的软件资产是立体匹配算法,大部分都是半全局匹配,但要真做的好,需要长时间摸索。
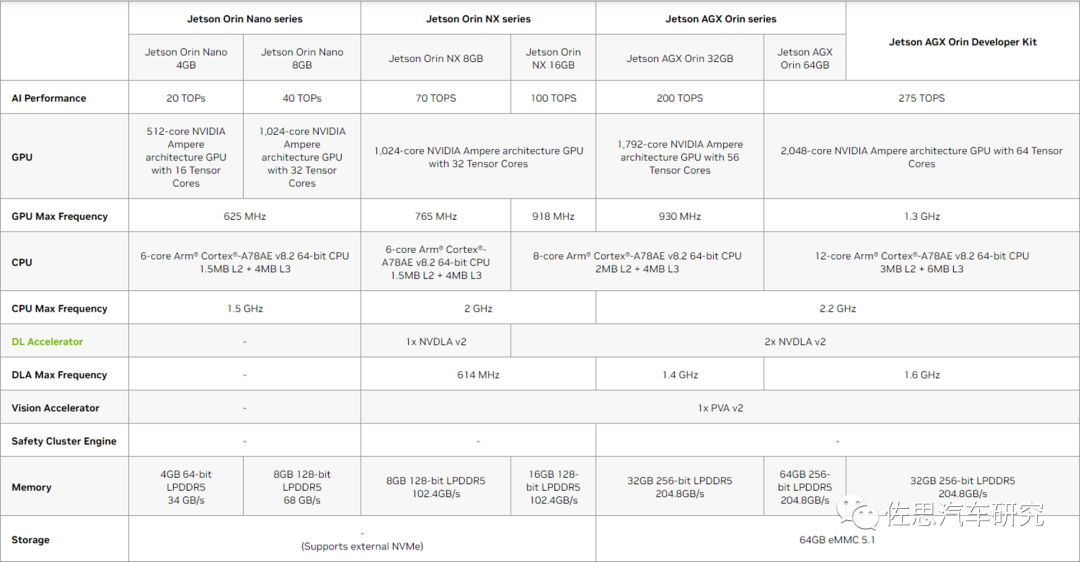
英伟达Orin芯片基本参数,图片来源:NVIDA官网
深度图的计算主要是CPU的工作。深度图之后是自由空间(Freespace)计算,主要由GPU负责。
02
域控制器里的MCU
一般来说,ADAS域控制器用的MCU都是由英飞凌或NXP提供,特别是英飞凌的TC297X/397X系列,市场占有率很高。瑞萨、英飞凌和NXP的主流MCU都达到ASIL-D级标准,如大疆ADAS域控制器工程样机的MCU采用德州仪器TMS570LC4357,该芯片2014年推出,未通过ASIL认证,只有AEC Q-100认证。
2024年下半年,英飞凌计划开始量产采用28nm技术工艺的新AURIX TC4xx。AURIX TC4xx系列微控制器主要面向大量数据吞吐类应用,如高级辅助驾驶系统、各个域控制器、新能源和网关系统等。
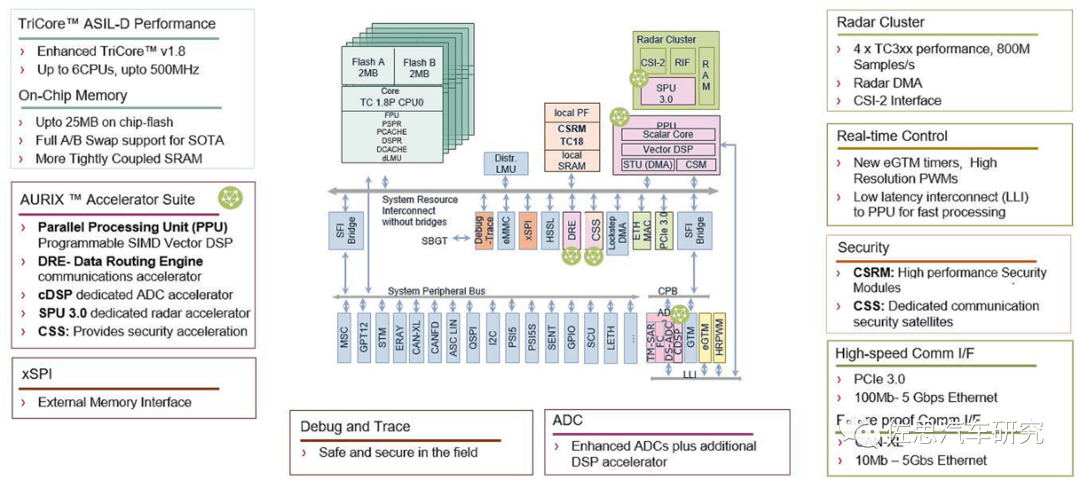
英飞凌TC4xx架构图,图片来源:英飞凌官网
MCU非常重要,这是保证域控制器达到ASIL-C/D级认证最重要的一环。
03 接口
ADAS域控制器需要丰富的接口(视频接口、以太网接口、CAN接口等)来连接各种传感器设备,如:摄像头、激光雷达、毫米波雷达、超声波雷达、组合导航、IMU以及V2X模块等。
摄像头接口一般采用GMSL、LVDS、FPDLink等协议,毫米波雷达一般采用CAN/FD通讯,而激光雷达需要上传大量的数据多采用以太网接口。
在大疆ADAS域控制器载板MCU上方是两个以太网交换机,即Marvell的88EA6321,左边是一个硬盘SATA接口,用Marvell的88SE9171芯片将SATA转换为PCIe接口,绝大部分开发板都不带SATA接口,一般都用USB接口。88SE9171旁边还有一个台湾华邦Winbond的W25Q64JV,这是一个NOR Flash,容量为64Mb,应该是存储了简单的硬盘驱动程序。
Marvell第一代车载以太网交换机88EA6321,是7端口以太网千兆性能交换机,充分符合IEEE802.3车载标准,支持AVB(音频/视频桥接功能),并支持低能耗以太网,可降低功耗。该款7端口以太网交换机集成了2个IEEE 10/100/1000BASE-T/TX/T端口、2个RGMII/xMII(这2个端口可配置成1个 GMII)端口和1个SGMII/SerDes端口。
该交换机提供远程管理功能,可轻松连接和配置该设备。它通常是在主处理器和MCU之间的桥梁,也就是英伟达Xavier和德州仪器TMS570LC4357。
88EA6321是Marvell早期产品,目前Marvell的以太网交换器已经演进到第三代,不过Marvell比较先进的产品通常只和大厂合作。88EA6321目标市场是对安全要求不太高的场合,如车身控制器、Infotainment控制器和网关。最高也只支持1G,虽然特斯拉也在用这颗芯片,即使大众这样的传统车厂的新产品不会用如此低带宽的交换机,目前最先进的设计,最高已经支持10G,也就是千兆以太网,一般也支持到2.5G。
某些点云密度高的激光雷达,峰值速率可能会超过每秒100M,88EA6321不适合接点云密度高的激光雷达(用CAN更不可能了,CAN最高可用的只有0.5M带宽),而目前主流的毫米波雷达都是CAN或CAN-FD接口,极少数4D毫米波雷达可选以太网输出,默认一般是CAN-FD。
04 存储
与消费电子领域相同,车端开始规模化采用LPDDR DRAM、UFS、eMMC等高速存储器件,以满足ADAS域控制器的系统、软件级算法对数据传输与存储需求。目前,主流域控制器存储组合主要采用“LPDDR+UFS”的形式,与手机端存储组合一致。
域控用存储,美光走在了行业前列。其在2021年6月,美光推出首款车用UFS 3.1内存设备产品组合,更具成本/密度优势。美光UFS 3.1的数据读取性能是上一代 UFS 2.1的两倍,连续写入性能提高了50%,可满足3级以上ADAS系统和黑匣子应用中不断增长的传感器和摄像头数据对于实时本地存储的需求。
理想L9 ADAS域控制器,便搭载了美光车规级LPDDR5 DRAM内存和基于3D TLC NAND技术的UFS 3.1存储芯片。截至目前,美光LPDDR5是业界唯一一款获得汽车安全完整性等级ASIL-D认证的内存产品。
随着车辆智能驾驶辅助等级提高,及高速/城市NGP、自动泊车AVP等功能的逐步应用,将进一步带动车规DRAM容量、带宽及产品要求。
容量方面,根据美光的数据,L1/2级汽车单车DRAM容量需求约8GB,L3级和L5级则分别提升至16GB和74GB。
带宽方面,L2级DRAM带宽一般为25-50GB/s,L3级时带宽可达200GB/s,L4级之后带宽将提升至1TB/s。
产品方面,L2级主要采用基础的DDR2/DDR3,现阶段L2开始向L3升级,DRAM也将逐步往DDR4/LPDDR4/LPDDR5/GDDR5切换。
UFS层面,UFS由JEDEC特别定义为e-MMC的高性能存储器替代品。它已经成为主要的智能手机解决方案,并持续迁移到车载应用和其他应用当中。UFS最终将超越e-MMC,成为主要的车载应用存储解决方案。
05 解串行
解串行的代表型号是德州仪器的DS90UB960。360全景鱼眼镜头环视通常由Infotainment完成,环视的有效距离一般都在10米内,不可能做远距离的ADAS,一般只用来泊车,ADAS域控制器不考虑360环视,再说,一个DS90UB960足以对应4个360环视图像传感器。
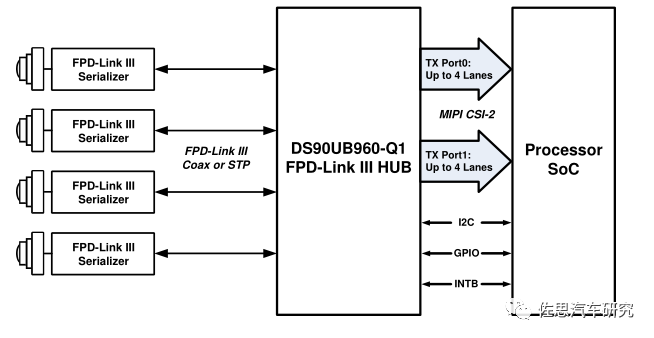
DS90UB960典型应用图,图片来源:德州仪器
上图是德州仪器DS90UB960的典型应用图,即接4个200万像素帧率30Hz的YUV444数据,或者4个200万像素帧率60Hz的YUV420数据,后者可能性更大。
DS90UB954是DS90UB960简化版,从4Lane减少到2Lane。与之配套的一般是DS90UB953。
推测特斯拉的车内驾驶员状态监测用这颗芯片,因为摄像头的LVDS输出不适合远距离传送,基本上摄像头都要配备一个解串行芯片,将并行数据转换为串行用同轴或STP传输,这样传输距离远且EMI电磁干扰更容易过车规。
这里需要说明一下摄像头的数据格式,通常由RAW RGB、YUV两种。
YUV常见的有三种级YUV444,YUV422和YUV420。
计算带宽的公式对RAW RGB来说是像素×帧率×比特×4,比如一款摄像头输出30Hz,200万像素,那么带宽是200万x30x8x4,即1.92Gbps,这个带宽太宽了。
YUV444是像素×帧率×比特×3,即1.44Gbps,YUV422是像素×帧率×比特×2,即0.96Gbps,YUV420是像素×帧率×比特×1.5,即0.72Gbps。
ADAS通常对色彩考虑不多,YUV420足够。除车载外一般多采用YUV422。
审核编辑:刘清
-
爱普生 SG-8101CGA:ADAS 智能驾驶域控制器的 “智慧芯” 动力2025-03-12 968
-
通过电压转换启用下一代ADAS域控制器应用说明2024-09-11 498
-
使用逻辑和转换优化ADAS域控制器2024-09-04 427
-
浅析ADAS域控制器技术2024-02-01 3288
-
汽车区域控制器的关键技术和MCU解决方案深度分析2023-10-18 3426
-
MCU是否会从ADAS域控制器消失2023-06-05 1026
-
什么是域控制器?OEM为什么要转向域控制器?2023-05-04 2157
-
浅析ADAS域控制器关键组件2023-01-31 4251
-
介绍汽车区域控制器的一些关键技术和MCU解决方案2022-10-26 3257
-
汽车ADAS域控制器SoC架构介绍2022-10-12 5275
-
简要分析一下SSB车身域控制器电路2022-02-14 1569
-
大联大世平推出基于NXP ADAS域控制器解决方案2019-10-22 3225
-
重置域控制器管理员密码的几个步骤分析2019-07-15 3559
-
域控制器是下一代智能汽车架构的关键2019-06-27 5579
全部0条评论

快来发表一下你的评论吧 !
