

陀螺仪航向随着时间推移累积漂移误差
描述
Ian Beavers
测量角速率的MEMS陀螺仪有几个内部误差因素,偏置不稳定是一个组成部分。然而,与分立元件相比,惯性测量单元(IMU)具有几个优势,可增强性能。具有六个自由度的IMU由多个惯性MEMS传感器组成,这些传感器经过温度补偿和校准以在正交轴上对齐。内部 3 轴陀螺仪功能测量围绕已知点的旋转,而 3 轴加速度计测量位移。使用数字信号处理器或微控制器的后处理步骤为传感器融合提供了内部手段。
陀螺仪受到偏置不稳定的影响,其中陀螺仪的初始零读数由于设备内固有缺陷和噪声的集成而导致随时间漂移。偏置重复性可以在IMU的已知温度范围内进行校准。但是,积分恒定偏置不稳定性会导致角度误差。这些误差将随着基于陀螺仪的旋转或角度估计的长期漂移而累积。漂移的不良结果是计算出的航向误差有增无减。相反,加速度计对振动和其他非重力加速度很敏感。
陀螺仪漂移主要是由于两个组件的集成:一个缓慢变化的近直流变量称为偏置不稳定,另一个高频噪声变量称为角度随机游走(ARW)。这些参数以单位时间的旋转度数来测量。偏航轴对这种漂移最敏感。通过使用加速度计反馈来监控相对于重力的位置,可以在 IMU 内消除很大一部分俯仰(姿态)和滚动轴陀螺仪漂移。使用低通或卡尔曼滤波器滤波IMU内的陀螺仪输出也是消除部分漂移误差的广泛使用的方法。
理想情况下,需要两个基准来校正所有轴上的陀螺仪漂移。具有 3 个自由度的 IMU 通常提供额外的磁力计传感器——大约 <> 个轴。磁力计感知相对于地球磁北极的场强。这些传感器可以与加速度计数据一起使用,作为另一个外部参考,以减轻陀螺仪漂移误差对偏航轴的影响。然而,设计适当的空间磁力计可能不如加速度计可靠,因为有许多东西会产生与地球相同数量级的磁场。
消除长期漂移的另一种更有效的方法是对陀螺仪进行零角速度更新。只要知道设备完全静止,陀螺仪的偏移就可以在相应轴上归零为零。这个机会可能因应用而异。但是,系统处于重复静止状态的任何实例都可用于清零,例如怠速汽车、静止的自主机器人或人类脚步之间的时间。
当然,使用最先进的IMU,在开始时在设计中具有最小的偏置不稳定性,可能会对陀螺仪漂移产生最直接的影响。陀螺仪的恒定偏置误差可以通过在器件不旋转时长时间取输出的平均值来测量。IMU Allan 方差图显示了陀螺仪每小时旋转度数的漂移与积分时间 Tau 的关系。它通常绘制在对数-对数刻度上。ADIS16490是ADI高性能、战术级IMU产品组合中的最新产品。ADIS16490的运行中偏置稳定性仅为每小时1.8°。这反映在图16490的ADIS1艾伦方差图中,在一小时点(1秒)处的误差为8.3600°。
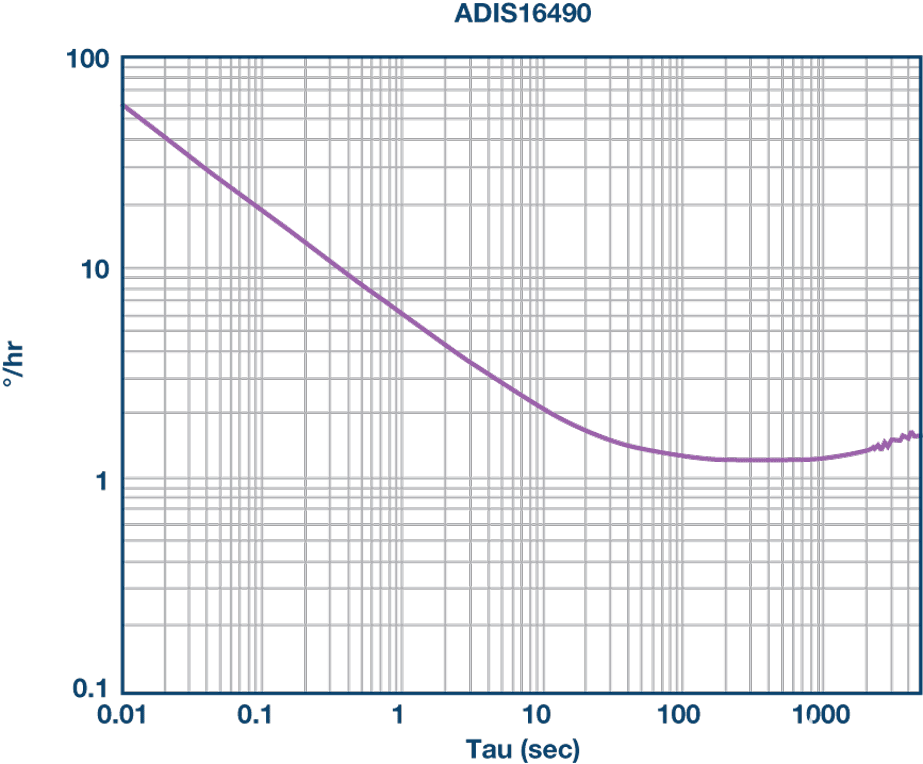
图1.ADIS16490陀螺仪根艾伦方差。
审核编辑:郭婷
-
详解三轴陀螺仪的技术原理2016-10-26 5869
-
评估加速计和陀螺仪,全方位了解噪音和漂移误差2018-02-27 12074
-
陀螺仪漂移很大 怎么解决2014-07-22 3362
-
陀螺仪的漂移指标,对机器人意味着什么2018-10-29 2742
-
航向陀螺仪有什么功能?2019-11-11 3240
-
陀螺仪随机漂移的测取2009-08-13 659
-
卡尔曼滤波在陀螺仪随机漂移中的应用2013-09-25 815
-
三轴陀螺仪有什么用_三轴陀螺仪的作用2017-10-26 15012
-
论陀螺仪传感器与加速度传感器的异同2018-07-17 1976
-
陀螺仪航向的漂移误差可能会随时间推移而累积吗?2018-05-03 18886
-
机器人选择陀螺仪时喜欢使用的指标是漂移,这对机器人意味着什么?2018-06-01 6609
-
航向陀螺仪的组成_航向陀螺仪的功能2020-01-11 8744
-
MEMS加速度计和MEMS陀螺仪的区别2020-04-16 3116
-
MEMS加速度计和MEMS陀螺仪的区别是什么2020-06-08 2399
-
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别2023-08-21 9863
全部0条评论

快来发表一下你的评论吧 !
