

卡尔曼或FIR滤波器适用于我的IMU
描述
Ian Beavers
这些过滤器选项中的每一个在 IMU 中都提供了截然不同的功能。在大多数情况下,它们在操作中是独立的。它们的使用将取决于终端系统的要求。让我们进一步了解一下细节以及它们如何应用于传感器系统。
将抽取与有限脉冲响应(FIR)滤波器结合使用是一种降低IMU全输入带宽的方法,以便仅关注狭窄的低通活动频带。当系统受到许多旋转和加速度频率运动时,这尤其有用,其中只有一部分在传感器内需要观察。此外,任何不必要或被忽略的高频活动都有可能混叠回目标频带,而不会受到FIR带通滤波器的滤波抑制。
当不需要传感器的全部带宽时,FIR滤波器最有价值。相反,如果对低通区域内的已知信号频率带宽感兴趣,则可以滤除不需要的信号。例如,系统的目标旋转频率可能仅在 20 Hz 到 50 Hz 之间。虽然可能还有其他更高频率的噪声可以检测到,但在IMU内进行测量并不重要。图1显示了使用抽取和FIR滤波器选项B将全带宽进行低通滤波16倍的方法。
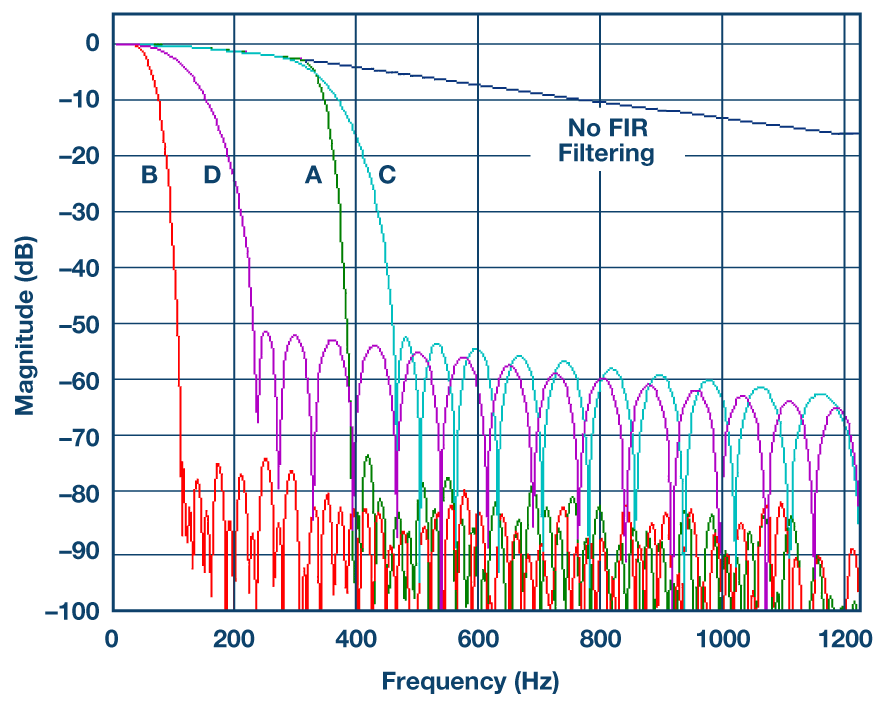
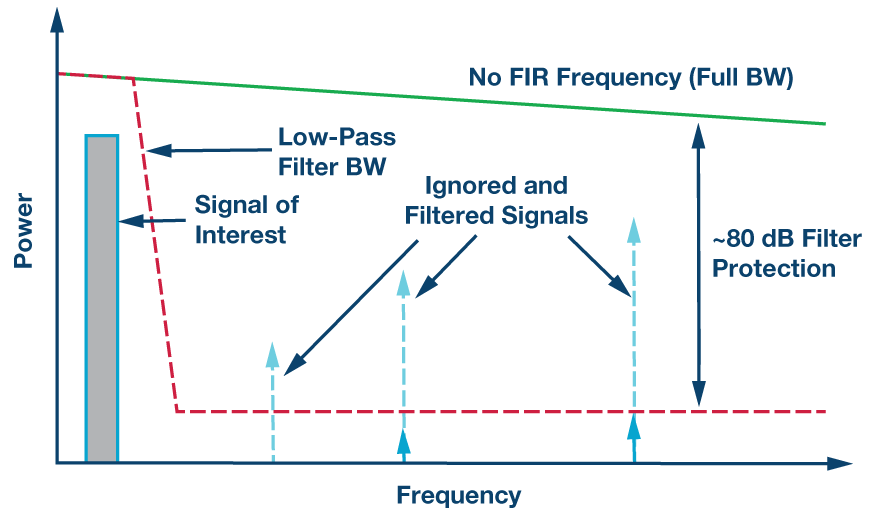
图1.ADIS16480的FIR滤波器响应(左)和B滤波器的示例用例(右),其中可以滤除不需要的信号以聚焦在目标的低通频率带宽内。
卡尔曼滤波器以电气工程师共同发明人鲁道夫·卡尔曼的名字命名,与抽取滤波器和FIR滤波器组合相比,具有不同的优势。描述卡尔曼滤波器的“滤波器”一词实际上可能有点用词不当。它更类似于“递归估计器”。卡尔曼滤波器在系统中最有价值,在这些系统中,预测位置可能比可能具有位置误差的未滤波噪声解更有用。卡尔曼滤波器使用 IMU 内的所有传感器轴贡献来估计方向角。
虽然比单个方程复杂得多,但我们可以通过删除状态矩阵来简化这里的用例,我们可以得到如下所示的数学:
Xk= Kk×Zk+ (1 – Kk) × XK–1
Xk= 电流估计
Kk= 卡尔曼增益
Zk= 测量值
XK–1= 先前的估计
我们可以对待每一个k作为识别每个传感器轴输出的离散时间间隔或样本。新的最佳估计是从之前的最佳估计值做出的预测,加上已知外部影响的增益校正权重。初始卡尔曼增益或协方差系数在IMU寄存器设置中使用,以建立Isensor输出矢量之间的预期相关性。在 IMU 中使用的最佳协方差值通常取决于特定的观测值。因此,它可以是测量、观察数据、分析、调整和重复的迭代过程。ADIS16480采用内部算法,使用创新残差,可以实时自适应地调整协方差项。
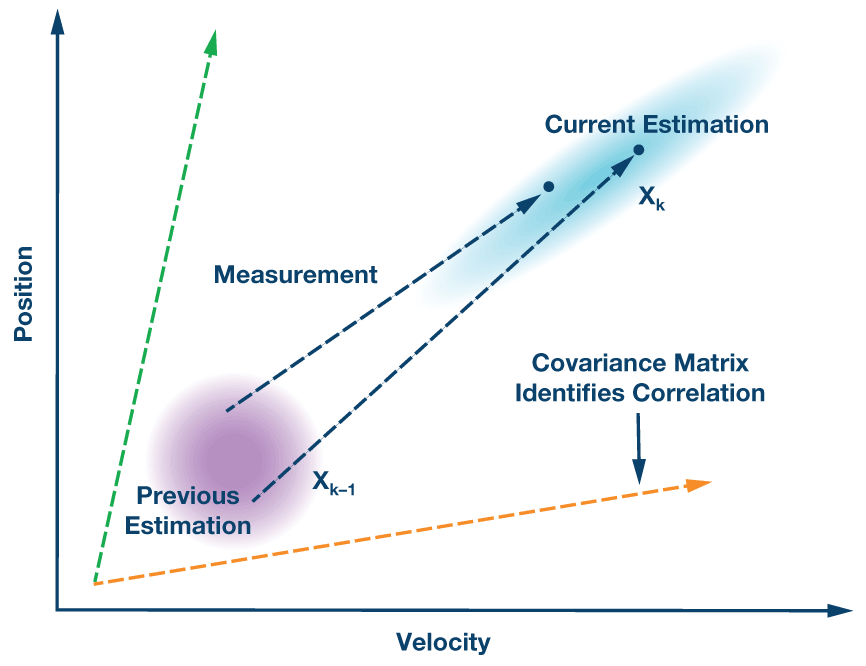
图2.一个示例卡尔曼滤波模型,其中两个变量(在本例中为速度和位置)具有一定程度的相关性。当前位置可以根据前一个位置、IMU 测量的加速度值以及两者之间相关性的协方差权重来估计。
审核编辑:郭婷
-
卡尔曼滤波器的特性及仿真2024-11-04 1995
-
用于定位的实用卡尔曼滤波器2023-06-16 848
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 1048
-
卡尔曼滤波器介绍与理论分析(下)2023-02-10 1035
-
如何理解卡尔曼滤波器?卡尔曼滤波器状态方程及测量方程2022-12-15 4810
-
扩展卡尔曼滤波的原理2022-08-12 7664
-
卡尔曼滤波器的基本原理2022-03-21 7193
-
卡尔曼滤波器是什么2021-11-16 1639
-
卡尔曼滤波器的使用原理2021-08-17 1553
-
基于卡尔曼滤波器的PID设计教程2021-06-03 1325
-
图解卡尔曼滤波器2018-02-07 5119
-
卡尔曼滤波器通俗讲解2016-08-17 5101
-
卡尔曼滤波器参数分析与应用方法研究2016-06-21 953
-
卡尔曼滤波器原理2008-07-14 1428
全部0条评论

快来发表一下你的评论吧 !
