

特斯拉的HW4.0内部拆解分析
汽车电子
描述
其中自从2014年特斯拉发布其Autopilot HW1代以来,每一代硬件更新都会引起行业大量的关注。
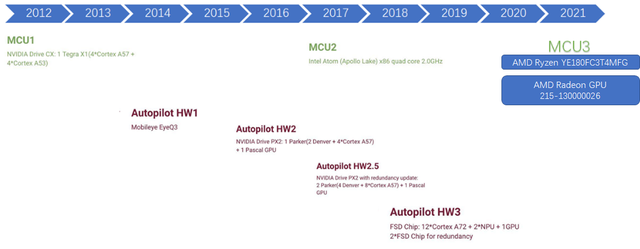
▲图1 特斯拉Autopilot和信息娱乐系统迭代时间轴(来源:汽车电子设计)
自2019年特斯拉发布采用两颗自研FSD芯片的HW3.0之后,其声浪有增无减。时隔3年后的今天,特斯拉的HW4.0也即将发布了,最近在外网上已经有对HW4.0的拆解,并且将搭载在新款的Model X,下面一起来看看。
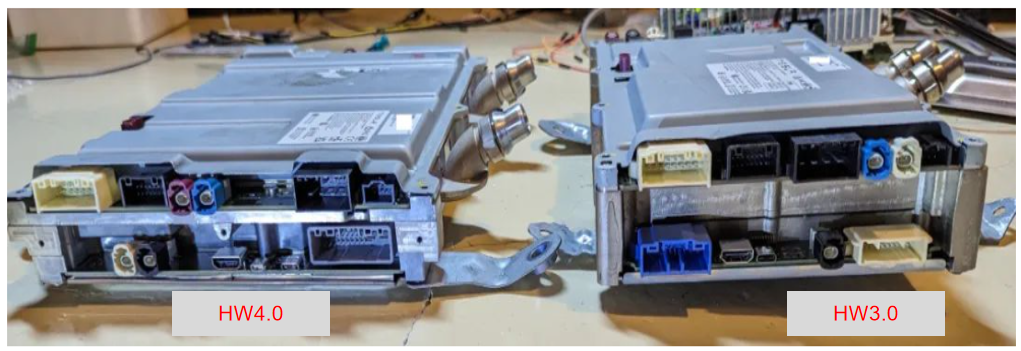
首先是外观,如下图所示,相比HW3.0,HW4.0整体更大,并且安装点从原来的3个调整为四个,并且水冷的进出水口也做了调整。

▲图2 HW4.0与HW3.0的硬件对比
HW4.0控制器上的铭牌信息如下图所示。从图中可以看出,控制器是由台湾生产的,输入电压电流为16V10A,但是接插件供电上写的12V10A,如图4所示。
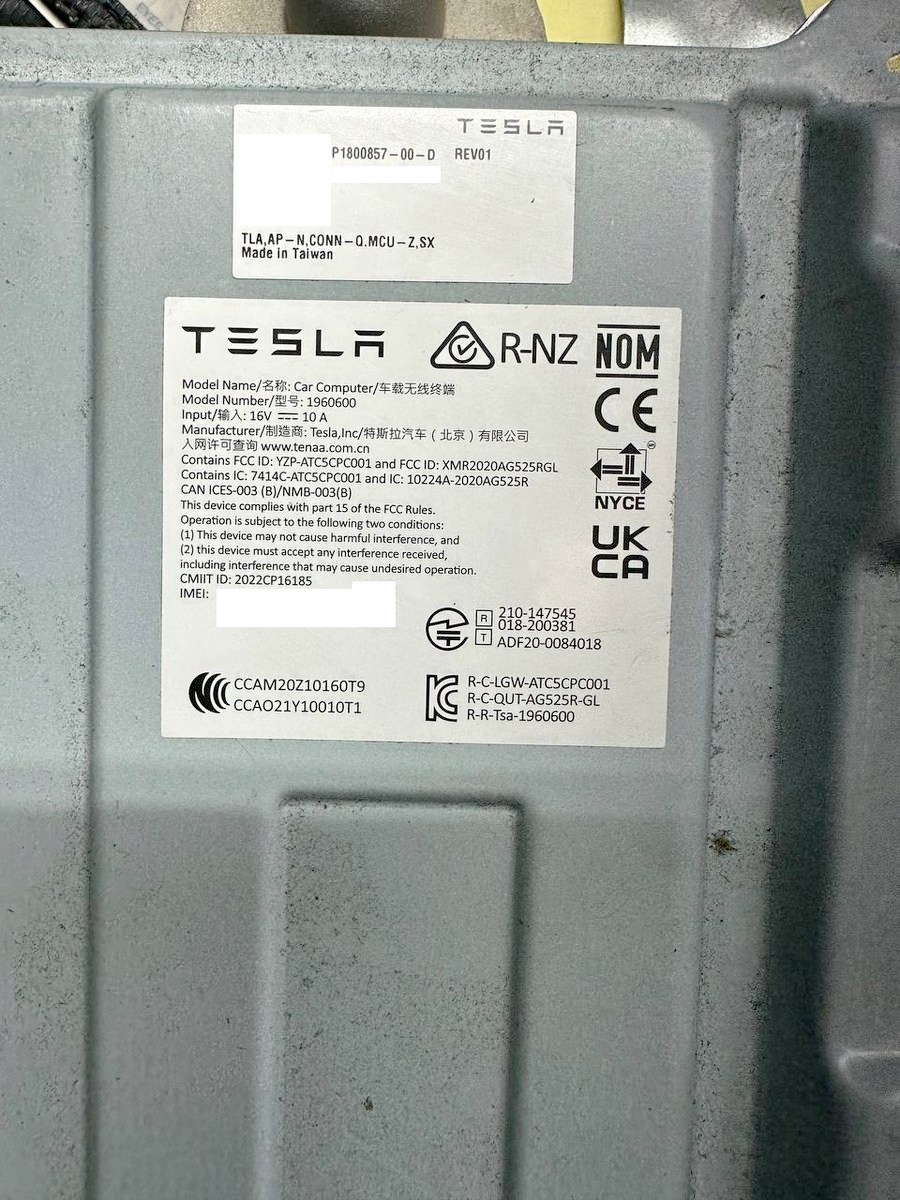
▲图3 HW4.0铭牌信息
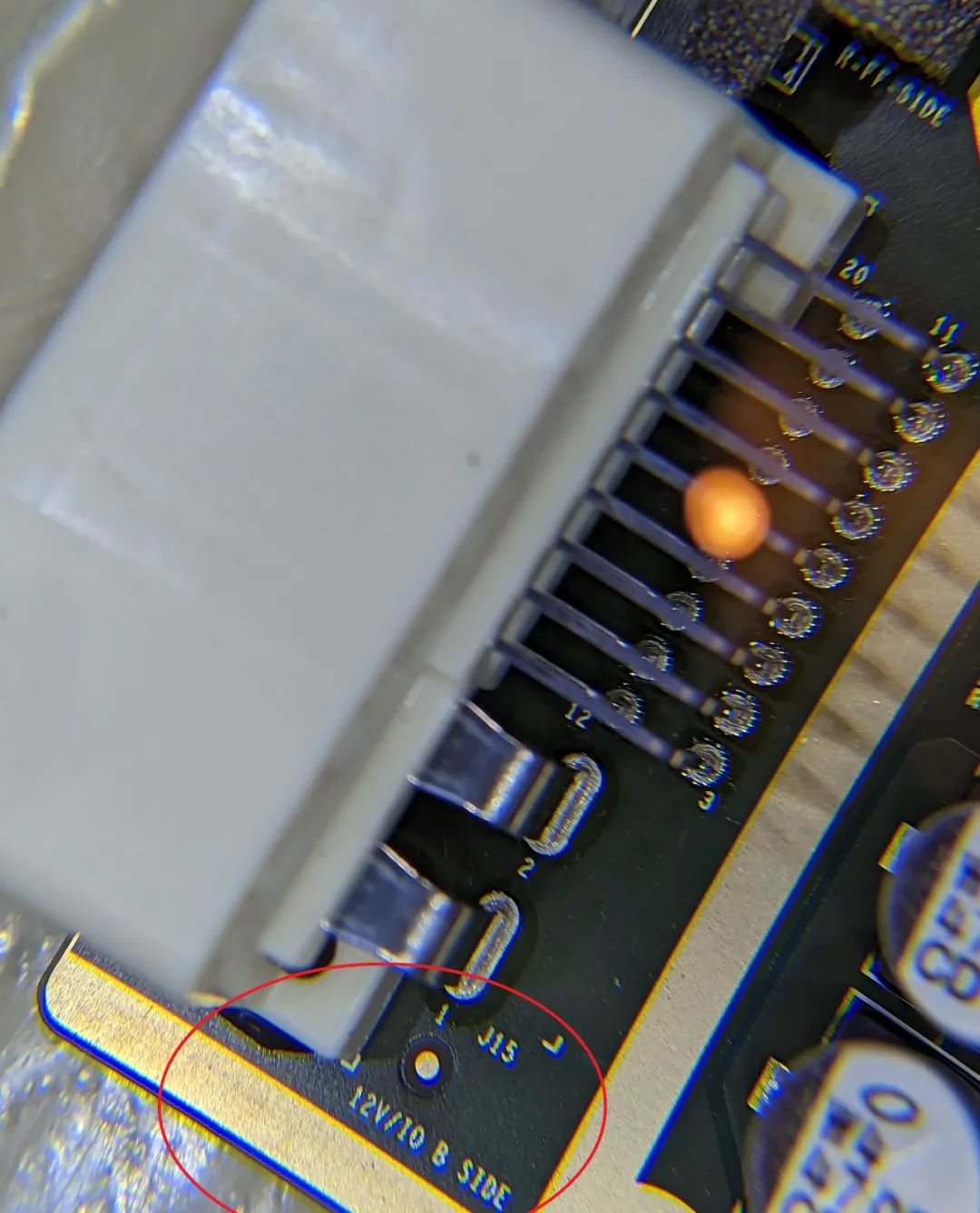
▲图4 HW4.0接插件电源输入
在硬件接口方面,也有很大的变化,如图5所示。
▲图5 HW4.0与HW3.0接口对比
首先是摄像头的从HW3.0的9个增加到了12个,其中有一个标注为备用。那增加的4的四个主要放在哪呢?

▲图6 HW4.0的摄像头接口
在HW4.0的硬件上标注的SVC的字样,并且根据特斯拉EPC的说法SVC 是一种保险杠罩。意味着有可能这三颗摄像头是安装在前后保险杠上,可能是用于图8所示的盲点监测。
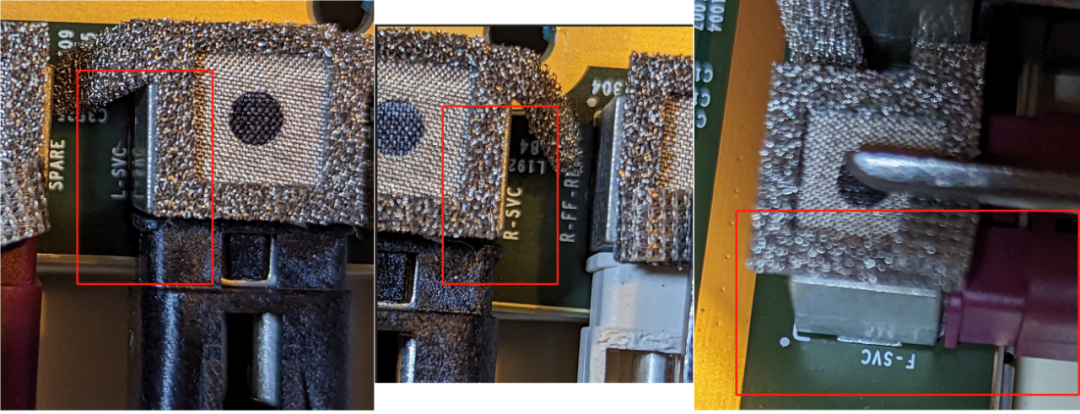
▲图7 HW4.0上的SVC字样
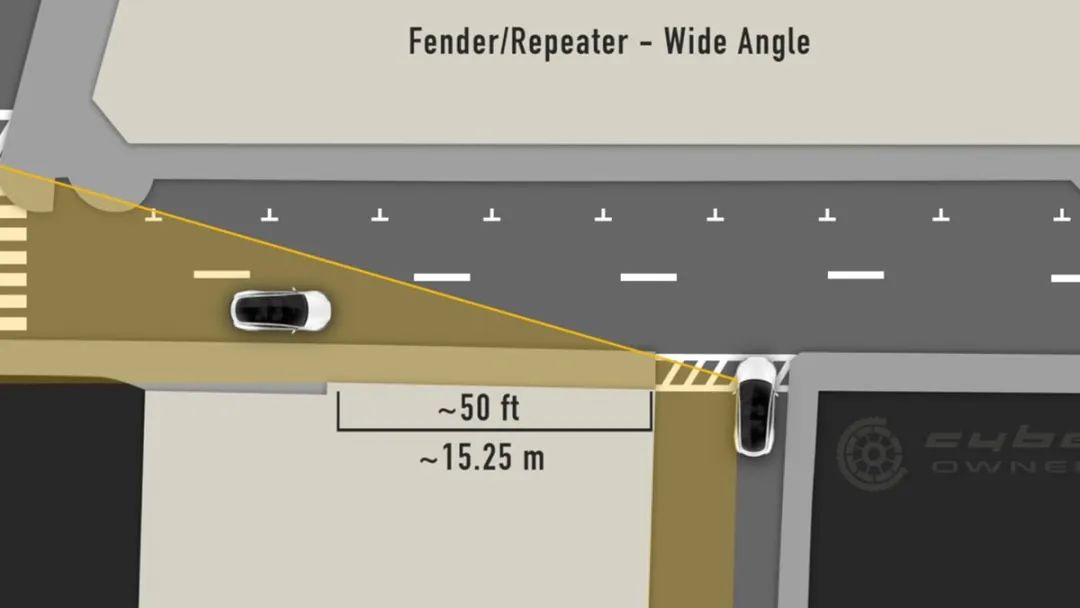
▲图8 盲点监测示意图
另外GPS更新为3频GPS模块接口,新增L5频率,有利于GPS测量过程中的周跳探测、电离层延迟误差改正和整周模糊度的确定。
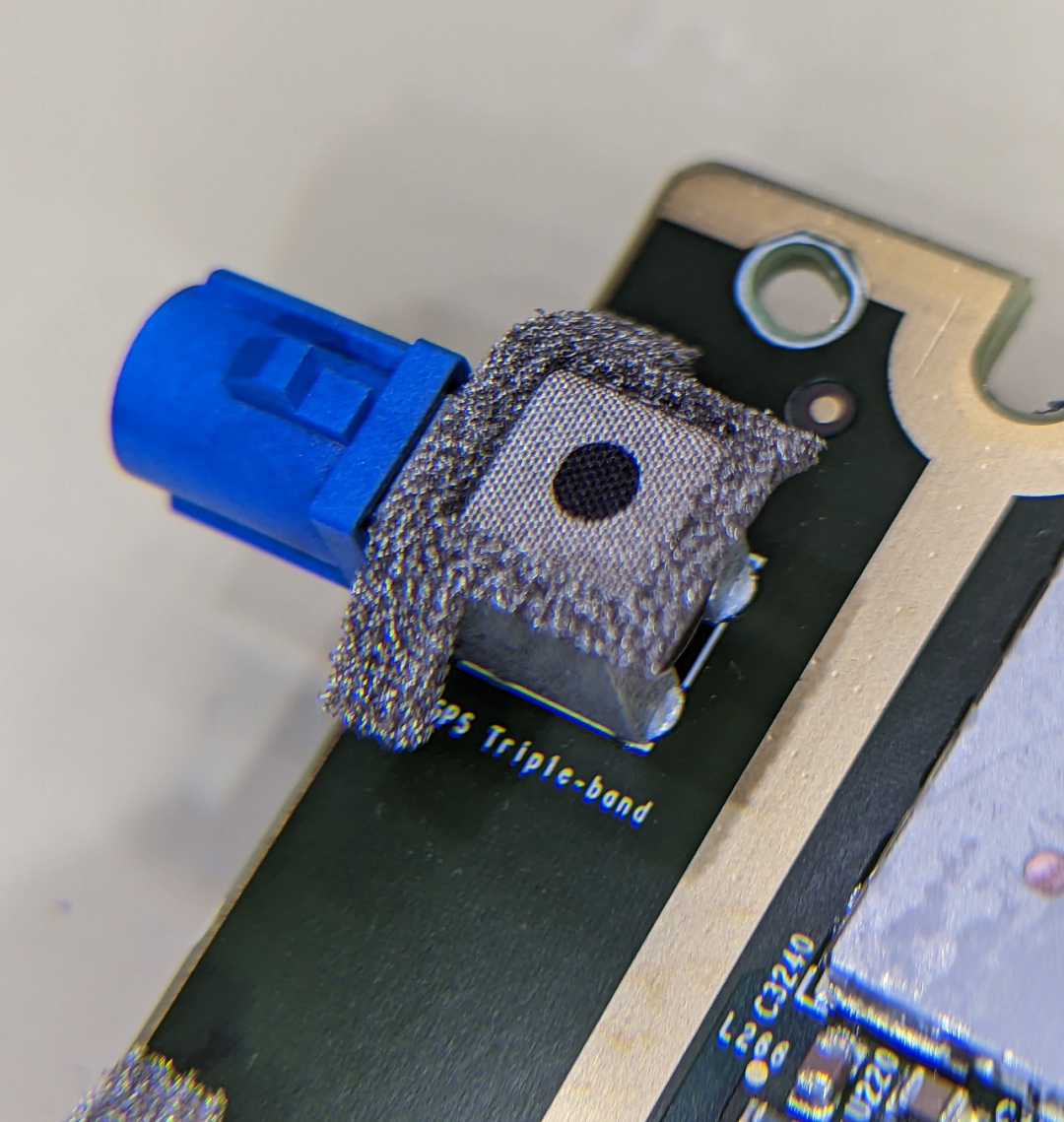
▲图9 GPS接口
另外与座舱相连的接口由HW3.0的一个,升级为2个。
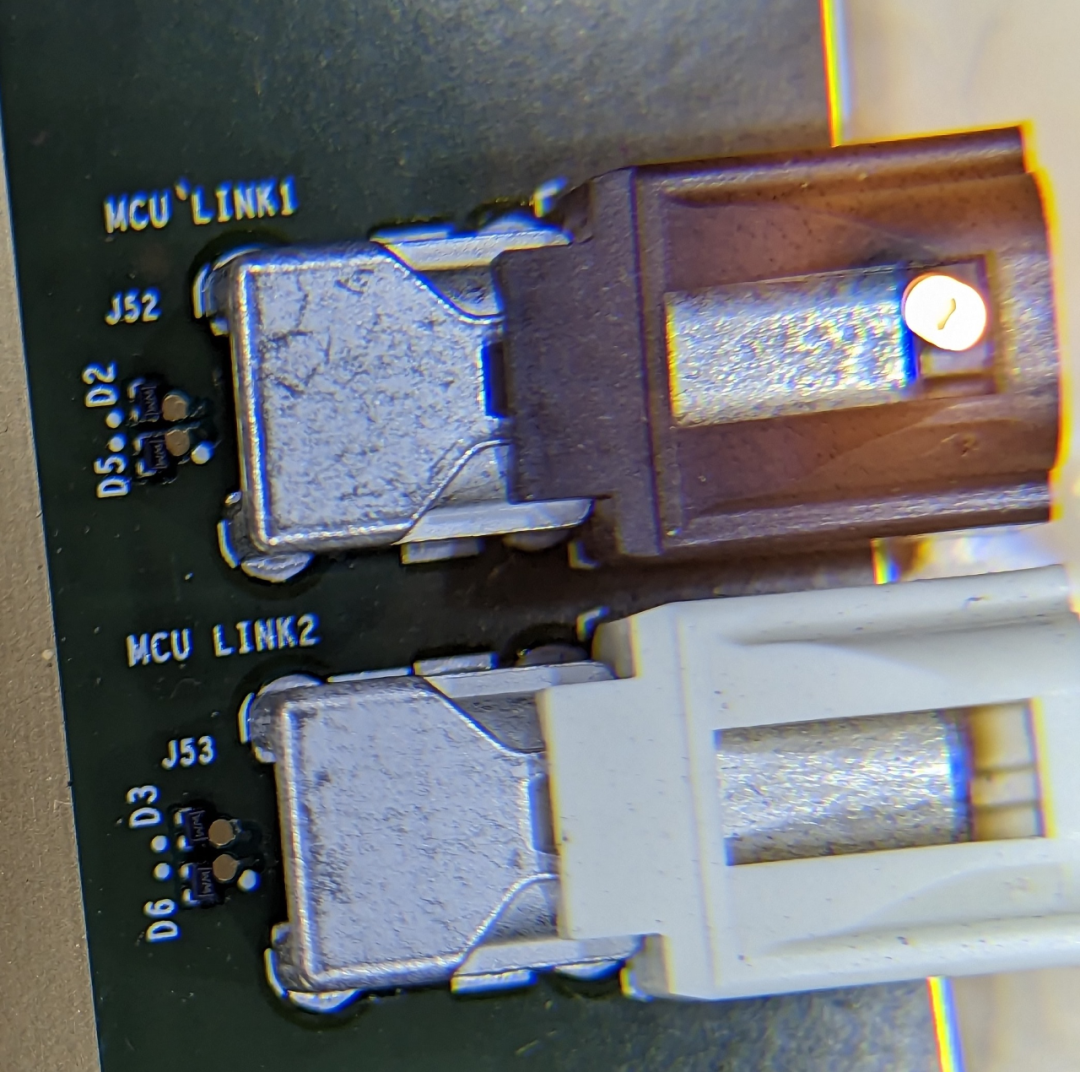
▲图9 与MCU的接口
PCB板方面,相比于HW3.0,也有些变化,但是据外网博主透露,没有大家预期的那么大的改变。
主控芯片型号为S4LW005X02,其中有20个CPU,分为5个集群,每个集群包含4个CPU核心,CPU的最大频率为2.35GHz,闲时频率1.37GHz3个NPU,工作频率为2.2GHz。
另外,相比HW3.0上APU+GPU分成两块PCB板,HW4.0将其集成到一块板子上,集成度更高一些,所以HW4.0的厚度相对要薄一些,但是在硬件上没有啥变化,还是16G RAM,256G NVME存储。
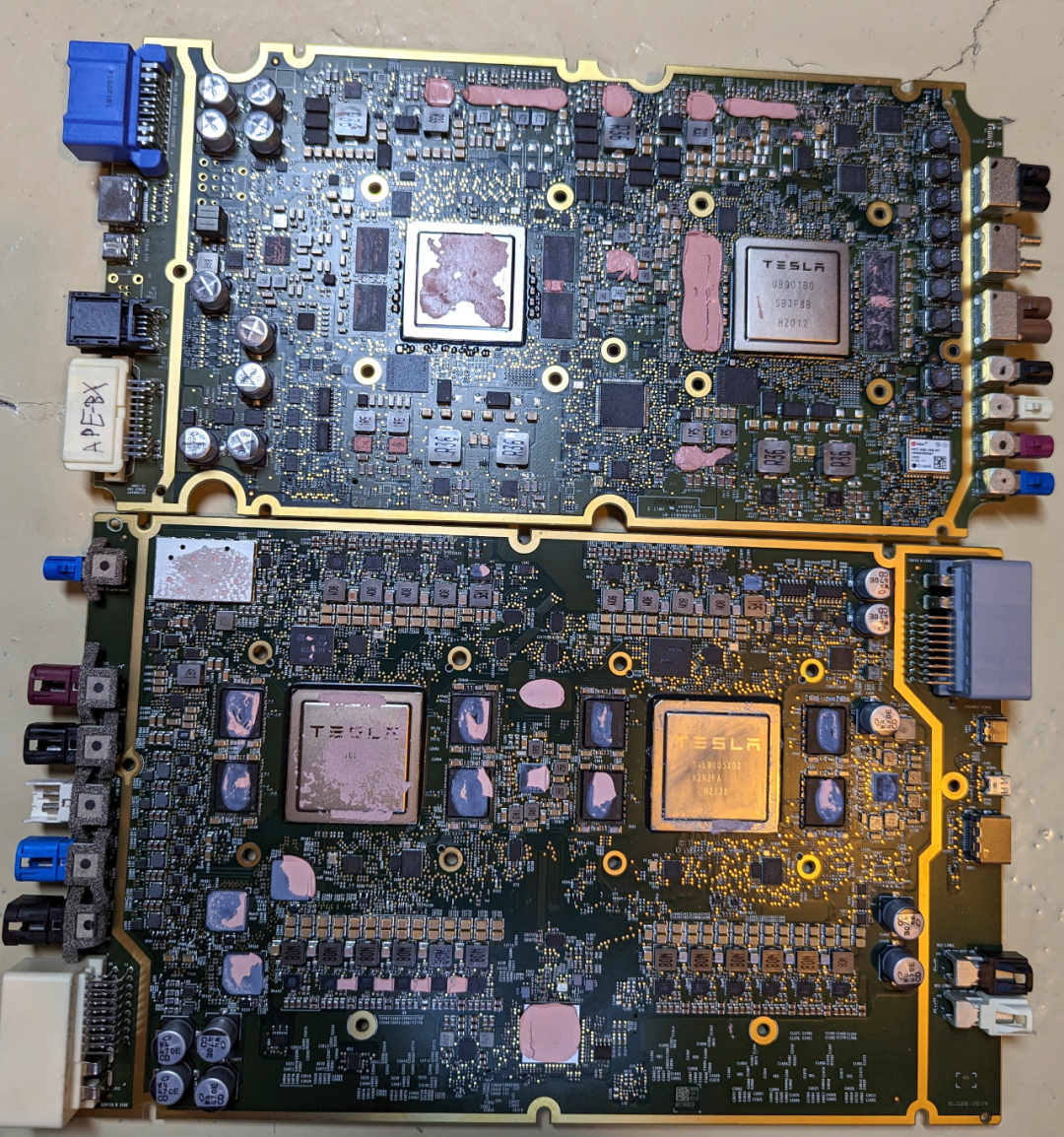
▲图10 主控板的对比,上面为HW3.0,下面为HW4.0
另外说了很久的雷达,也将重新回归,在FCC的资料显示,雷达命令为PHONENIX,最先在Model X上搭载,如下图所示。
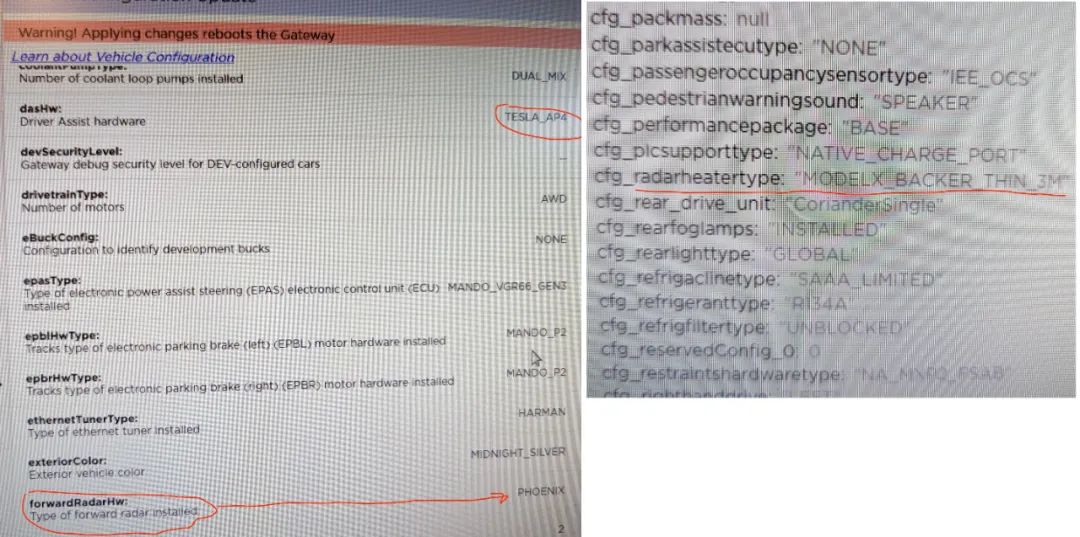
▲图11 FCC的雷达信息
雷达实物大致80X90mm,如图12,PCB板子如图13所示,主控芯片为赛灵思的XA7Z020,天线的布局如图14所示。
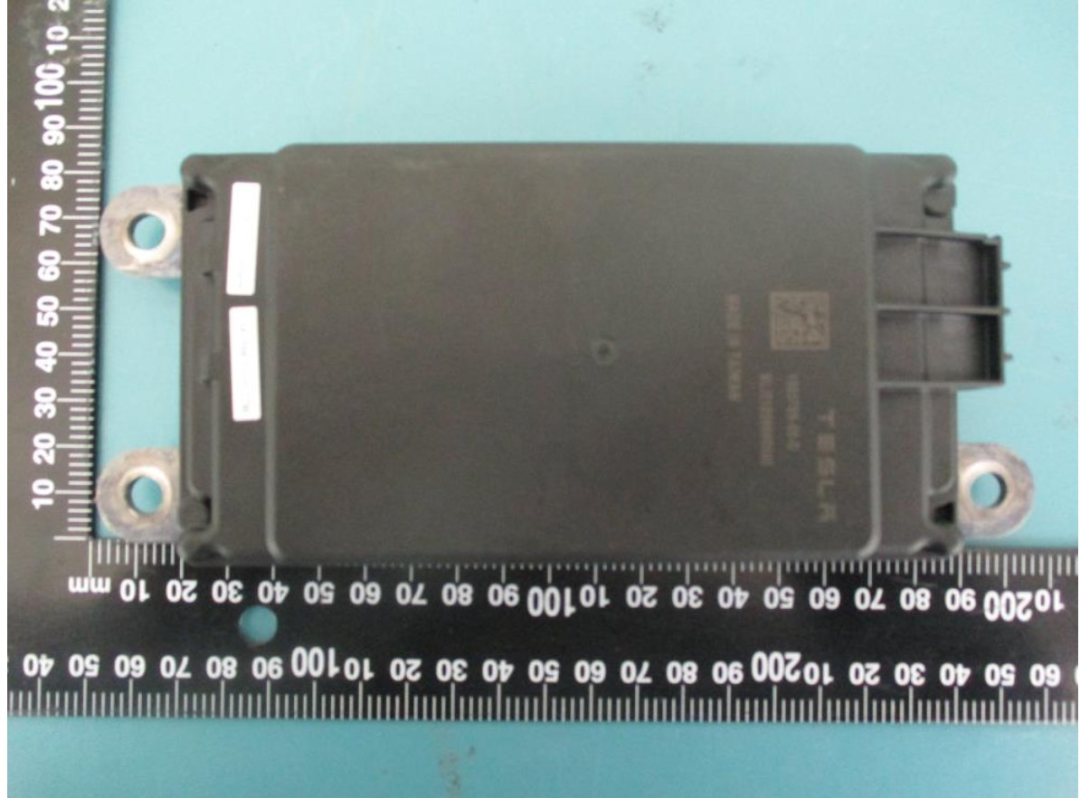
▲图12 雷达实物
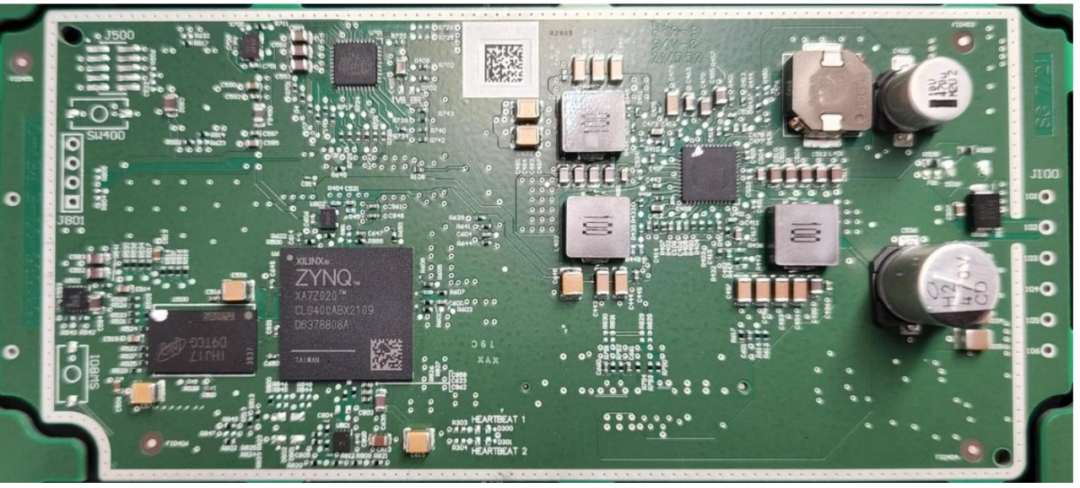
▲图13 雷达PCB板
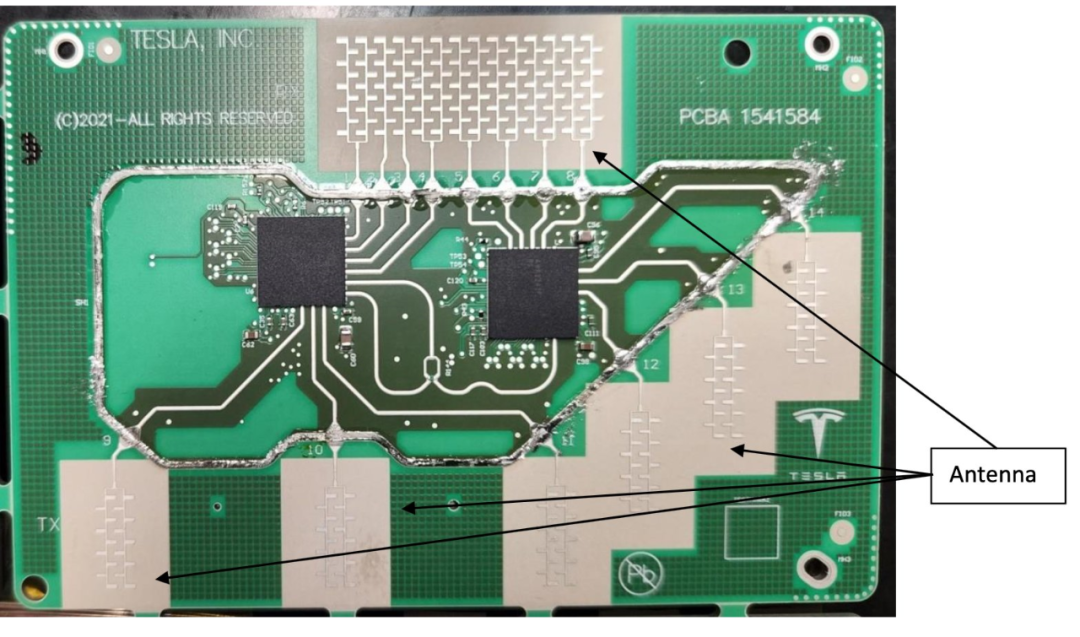
▲图14 雷达天线
编辑:黄飞
- 相关推荐
- 热点推荐
- 特斯拉
-
拆解特斯拉HW4.0的毫米波雷达主板2023-03-06 5495
-
特斯拉Model3的电池和电机与电控的拆解分析2019-03-17 30444
-
特斯拉欺骗消费者的事,并不是知道HW2.5和HW3.0的区别就行2020-03-08 9122
-
博通与特斯拉联合研发的HW 4.0芯片,用于特斯拉的全自动驾驶计算机2020-08-20 5214
-
特斯拉与台积电联手合作开发HW4.0自动驾驶芯片2020-09-02 1262
-
特斯拉下一代硬件—HW4.0自动驾驶硬件即将推出2021-01-26 4586
-
三星向特斯拉供应高性能固态硬盘SSD和图形DRAM产品2021-12-25 3256
-
特斯拉确认搭载4D毫米波雷达!它为何备受车企追捧?2023-02-23 5158
-
特斯拉重新捡回来的毫米波雷达,下一步脚落何处?2023-02-27 1442
-
特斯拉最新HW4.0用了哪些芯片?2023-03-01 8631
-
揭秘特斯拉新版毫米波雷达内部结构原理2023-03-16 2090
-
特斯拉的FSD芯片HW3和HW4的区别2023-08-29 6487
-
特斯拉中国Model Y升级驾驶辅助功能2024-02-05 2156
-
特斯拉:HW3若无法满足无人监督FSD,将免费升级至HW42024-10-24 4841
-
从HW1.0到AI5,特斯拉芯片做了一次极限删减?2026-06-03 1024
全部0条评论

快来发表一下你的评论吧 !
