

激光测风雷达信号与相干探测激光器介绍
描述
1 相干探测信号分析
由本振激光器产生激光通过光纤进行传输,其产生的本振光为:
 (5)
(5)
本振光经过分束器其中一路在通过 AOM 和放大通过望远镜发射到空气中,此时的信号可以表示为:
 (6)
(6)
放大后的信号经过光开关选择四个方向的望远镜输出打入空气并与空气中气溶胶产生碰撞产生反向的波形:
 (7)
(7)
通过光学探测器接收与本振光分束出的另一路,经过合束器合束后混频后的信号为
 (8)
(8)
根据光电探测器的平方律特性,光电探测器光敏面上的光电流为:

 (20)
(20)
公式中前两个分量包括高频的信号和直流信号会被探测器滤除最后得到的光电转换电流信号为:
 (22)
(22)
数字信号处理得到反射回信号的频率,根据多普勒效应,通过计算的频移和气溶胶的运动速度成正比,散射信号通过和系统内部光纤激光器产生的本振光进行相干调解然后经过 AD 采样后进行数字信号处理得到径向风速再经过风场反演算法,即得到目标范围内的风场信息。
2 相干探测激光器
激光器主要用来产生探测大气的激光。激光器除了波长么外还有激光输出功 率,线宽,光斑质量等参数。如果激光器光源为脉冲模式,还有重复频率,脉冲宽度,脉冲能量等参数。
2.2 激光器线宽
激光光源所发射激光并非理想单色光,而是有一定波长宽度,在频谱上表 现为频谱展宽,这个展宽决定了激光的相干长度。激光波长和频率存在如下关系:
 (2-2)
(2-2)
对公式(2-2)进行微分有
 (2-2)
(2-2)
或者写为:
 (2-3)
(2-3)
光源的相干长度定义为相干时间内激光传播的距离,相干长度可以表示为
 (2-4)
(2-4)
 表示激光光源的相干时间与激光器线宽之间的关系为
表示激光光源的相干时间与激光器线宽之间的关系为
 (2-5)
(2-5)
 (2-6)
(2-6)
设激光器波长2000nm,中心频率为 ,探测距离为2000m,
,探测距离为2000m, 。对应的波长为
。对应的波长为

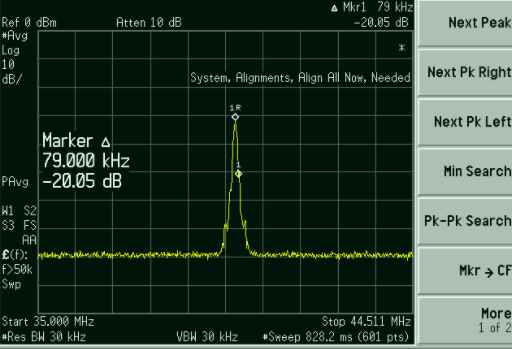
在相干探测系统中, 如果光源的相干长度越长,本振光和信号光的相干效率就会越高。激光线宽在对外差探测时带来的影响就是产生信号频谱密度分布上的展宽,该展宽频谱使得对频谱峰值提取精度降低。为了尽可能准确提取频谱密度上的峰值频率,要求峰值越窄越好,为此,在激光外差探测时,要尽可能的选取线宽较小的激光器。
2.2 脉冲激光器参数
脉冲测风激光雷达测量距离较远。但是往往存在几十米的探测盲区,盲区可以通过下面式子进行计算
 (2-7)
(2-7)
 为探测盲区距离等于最小可分辨距离
为探测盲区距离等于最小可分辨距离 ,c为光束,
,c为光束, 为脉冲宽度。
为脉冲宽度。
脉冲激光器的重复频率 决定了该激光雷达系统的最远探测距离,在激光雷达系统中,任意时刻探测器接收到的信号只能是一个脉冲信号在不同距离与大气物质作用的后向散射信号,如果一个时刻探测器接收到两个或者多个信号,多个脉冲在不同位置的后向散射信号将在探测器上反射混叠,探测器系统将不能分辨此时的大气反射信号是来自哪个位置的信号。
决定了该激光雷达系统的最远探测距离,在激光雷达系统中,任意时刻探测器接收到的信号只能是一个脉冲信号在不同距离与大气物质作用的后向散射信号,如果一个时刻探测器接收到两个或者多个信号,多个脉冲在不同位置的后向散射信号将在探测器上反射混叠,探测器系统将不能分辨此时的大气反射信号是来自哪个位置的信号。
 (2-8)
(2-8)
重复频率还决定了2s中系统能采集的回波脉冲的个数,由于脉冲雷达系统进行频谱估计时,需要多个回波信号进行多测非相干叠加计算。合适的重复频率能够提高激光雷达系统完成一次视线信号的风速计算。
脉冲激光器的输出能量一般由脉冲功率,平均功率,脉冲能量进行表征。
 (2-9)
(2-9)
 (2-20)
(2-20)
 为脉冲功率,
为脉冲功率, 平均功率,
平均功率, 为脉冲能量。
为脉冲能量。
3 AOM
相干多普勒测风激光雷达系统可以分为零差相干多普勒测风激光雷达和外差相干多普勒测风激光雷达,两者的区别在于发射激光中心频率和本振中心频率之间有没有经过频移调制。零差法没有频移调制,智能区分视向风速产生的多普勒频移大小,无法区分正负,因而无法区分视向风速的方向。外差法适用AOM进行频移调制,将零风速位置的追踪品频率调制为 ,当风速的方向与激光雷达望远镜的视向方向相同时,风速产生的多普勒频移
,当风速的方向与激光雷达望远镜的视向方向相同时,风速产生的多普勒频移 为负,反之为正,因此可以区分风速的大小和方向。为了避免风速过大导致的风向混叠,频移条质量和多普勒频移量需要满足
为负,反之为正,因此可以区分风速的大小和方向。为了避免风速过大导致的风向混叠,频移条质量和多普勒频移量需要满足
 (3-1)
(3-1)
若风速测量范围要求为v=±30m/s,在2550nm波长时,根据多普勒频移公式可得

则大于38.7MHz即可满足区分风向正负的要求,但是为了减少激光器的相对噪声和2/f 噪声对混频信号的影响,目前的相干多普勒测风雷达中最常用的调制为为80MHz。
审核编辑:刘清
-
频率可调谐光子集成外腔激光器2026-03-16 1066
-
空间激光雷达最小接收光功率的计算2009-05-15 4647
-
窄线宽单频激光器噪声测量技术介绍2016-12-30 4032
-
激光雷达分类以及应用2017-09-19 8920
-
如何选择汽车LiDAR的激光器和光电探测器2018-11-08 2755
-
半导体直接输出激光器介绍2021-12-29 5520
-
单频可调光纤激光器的应用2011-02-19 793
-
激光器与光电探测器2016-08-08 1103
-
海南空管分局开展激光测风雷达试点交流会2021-04-06 3257
-
激光测风雷达的原理解析2023-02-19 14207
-
激光器原理是什么 激光器的分类及应用 双波长激光器的工作原理2023-06-02 10122
-
虹科分享 | 激光测风雷达中准确监测温度、湿度和气压的重要性2022-09-23 3694
-
激光雷达的基本构成 激光雷达前景分析2023-08-23 5132
-
激光测风雷达的原理及应用介绍2023-09-07 3894
-
客户案例分享 | 破解激光测风雷达连接痛点,凌科连接器成用户优选2026-03-03 193
全部0条评论

快来发表一下你的评论吧 !
