

用于控制和监视MAX20734开关稳压器的PMBus协议
描述
MAX20734是完全集成的开关稳压器,包括串行总线(PMBus),支持高级稳压器监视和控制功能。本应用笔记介绍了用于控制和监视IC的串行接口协议。
MAX20734 PMBus接口概述
MAX20734完全集成开关稳压器包括串行总线 (PMBus™),支持高级稳压器监测和控制功能。本应用笔记涵盖MAX20734 通过 PMBus 制造修订命令将 F 报告为修订版的硅。PMBus 接口支持 PMBus 1.2 和 SMBus 2.0 规范的子集。
静态 PMBus 地址编程,采用外部电阻器
符合大功率 SMBus 直流规范
支持 PMBus 协议
写入字节/字
读取字节/字
发送字节
块读取
数据包错误检查机制支持
短信警报# 信号
监控功能
通过MAX20734 PMBus接口提供以下监测功能:
各种故障状态
使用R_SEL配置电阻器编程参数
输入电压
输出电压
结温
输出电流
控制功能
过热故障阈值
输出电流故障阈值
输出电压命令
输出电压最小和最大阈值
操作:开和关配置
调节电源良好延迟时序
软启动定时
频率
过流保护模式
内部增益值
输出电压指令斜坡速率
MAX20734 PMBus协议
写入/读取格式
MAX20734 PMBus接口支持单字节、双字节(字)寄存器读/写、块读以及发送字节协议。表 1 到表 6 显示了用于所有受支持的格式 操作。请注意,数据包错误检查可用于任何事务。表 7 显示了 MAX20734 PMBus命令代码写入WRITE_PROTECT寄存器 (Reg_0h) 的 0x10h 禁用 写保护功能和0x20H打开对所有寄存器的写保护,但 操作和VOUT_COMMAND寄存器。
表 1.读取字节格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 1 | 7 | 1 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | S | PMBus地址 | R | M-ACK | 数据字节 | M-纳克 | P |
表 2.写入字节格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | 数据字节 | S-ACK | P |
表 3.阅读单词格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 1 | 7 | 1 | 1 | 8 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | S | PMBus地址 | R | S-ACK | 数据字节低 | M-ACK | 数据字节高 | M-纳克 | P |
表 4.编写单词格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 8 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | 数据字节低 | S-ACK | 数据字节高 | S-ACK | P |
表 5.发送字节格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | P |
表 6.块读取格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 1 | 7 | 1 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | 命令 | S-ACK | S | PMBus地址 | R | S-ACK | 字节计数 = N | M-ACK | ||
| 8 | 1 | 8 | 1 | 8 | 1 | 1 | |||||||
| 数据字节 1 | M-ACK | 数据字节 2 | M-ACK | ... | 数据字节 N | M-纳克 | P | ||||||
表1至表6 图例
| S | 启动条件:时钟和数据线最初为高电平。 数据转换低电平,时钟高电平。时钟转换低电平。 |
| P | 停止条件:时钟和数据线最初为低电平。 时钟转换高,而数据低。数据转换率高。 |
| R | 读取位(逻辑高电平) |
| W | 写入位(逻辑低电平) |
| 命令 | 相关MAX20734 PMBus寄存器 |
| S-ACK | 从属确认 |
| M-ACK | 师父致谢 |
| M-纳克 | 大师不承认 |
注1.
数据包错误检查 (PEC) 可与这些命令结合使用。
注2.
PEC 是 CRC-8 错误检查字节,根据所有消息字节计算。
注3.
OEN 信号不需要很高即可通过 PMBus 接口进行通信。
表 7.MAX20734 PMBus命令代码
| 命令代码 | 12 月 | 命令名称 | 类型 | 大小 | 违约 | 低字节 | 高字节 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01小时 | 1 | 操作 | RW | 1 | 00小时 | OE_INT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| 02小时 | 2 | ON_OFF_CONFIG | RO | 1 | 1Fh | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | ||||||||
| 03小时 | 3 | CLEAR_FAULTS | WO | 0 | |||||||||||||||||
| 10小时 | 16 | WRITE_PROTECT | RW | 1 | 20小时 | PROT_ENABLE | |||||||||||||||
| 1兆位 | 27 | SMBALERT_MASK | RW | 2 | 不适用 | 警报掩码 [7:0] | 警报掩码[15:8] | ||||||||||||||
| 20小时 | 32 | VOUT_MODE | RO | 1 | 17小时 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | ||||||||
| 21小时 | 33 | VOUT_COMMAND | RW | 2 | C_SELA | VDAC[7:0] | 0 | 0 | 0 | 0 | 0 | 0 | VDAC[9:8] | ||||||||
| 24小时 | 36 | VOUT_MAX | RW | 2 | 0280小时 | VMAX[7:0] | 0 | 0 | 0 | 0 | 0 | 0 | VMAX[9:8] | ||||||||
| 78小时 | 120 | STATUS_BYTE | RO | 1 | 00小时 | 忙 | 关闭# | VOUT_OV_FAULT | IOUT_OC_FAULT | VIN_UV_FAULT | 临时 | 三氯联 | 不适用 | ||||||||
| 79小时 | 121 | STATUS_WORD | RO | 2 | 0000小时 | 忙 | 关闭# | VOUT_OV_FAULT | IOUT_OC_ 故障 | VIN_UV_FAULT | 临时 | 三氯联 | 不适用 | VOUT | 呵呵/ 努 | 输入 | 生产商_ 特定 | 权力_ 好 | 0 | 0 | 0 |
| 7安 | 122 | STATUS_VOUT | RO | 1 | 00小时 | OVP_FLT | 0 | 0 | UVP_FLT | 沃特玛 X_FLT | 0 | 0 | 0 | ||||||||
| 7兆位 | 123 | STATUS_IOUT | RO | 1 | 00小时 | OCP_FLT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| 7通道 | 124 | STATUS_INPUT | RO | 1 | 00小时 | 回复 | 0 | 0 | FUVLO_FLT | FUVLO_FLT | 0 | 0 | 0 | ||||||||
| 7分位 | 125 | STATUS_TEMPERATURE | RO | 1 | 00小时 | OTP_FLT | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||
| 7呃 | 126 | STATUS_CML | RO | 1 | 00小时 | 无效/ 支持 CMD | 无效/ 支持 数据 | 不對 佩克 | 0 | 0 | 0 | 其他 通讯 故障 | 0 | ||||||||
| 80小时 | 128 | STATUS_MFR_SPECIFIC | RO | 1 | 00小时 | VOUTMIN_ 外语 | SEALR_FLT | RADC_ 外语 | AUVLO_FLT | 升压故障 | VXSHORT _外语 | VSN_ VSP_ 外语 | LDO_OFF | ||||||||
| 88小时 | 136 | READ_VIN | RO透 | 2 | 不适用 | VINADC_AVE[7:0] | 0 | 0 | 0 | 0 | 0 | VINADC_AVE[9:8] | |||||||||
| 8兆位 | 139 | READ_VOUT | RO | 2 | 不适用 | VADC_AVE[7:0] | 0 | 0 | 0 | 0 | 0 | VADC_AVE[9:8] | |||||||||
| 8通道 | 140 | READ_IOUT | RO | 2 | 不适用 | IADC_AVE[7:0] | 0 | 0 | 0 | 0 | 0 | 0 | IADC_AVE[9:8] | ||||||||
| 8分位 | 141 | READ_TEMPERATURE_1 | RO | 2 | 不适用 | TADC_AVE[7:0] | 0 | 0 | 0 | 0 | 0 | 0 | TADC_AVE[9:8] | ||||||||
| 99小时 | 152 | MFR_ID | BLK | 5 | 不适用 | ASCII“马克西姆”(十六进制代码 56h, 4Ch,N54h, 52h) | |||||||||||||||
| 9兆位 | 155 | MFR_REVISION | BLK | 1 | 不适用 | ASCII “F” (十六进制代码 31H) | |||||||||||||||
| D1h | 209 | MFR_VOUT_MIN | RW | 2 | 0133小时 | VMIN[7:0] | 0 | 0 | 0 | 0 | 0 | 0 | VMIN[9:8] | ||||||||
| D2h | 210 | MFR_DEVSET1 | RW | 2 | 2061小时 | 0 | OCP[1:0] | 摩擦焊[2:0] | 统计[1:0] | 0 | 瑞金[1:0] | 一次性密码[1:0] | 0 | 视频启动[1:0] | |||||||
| D3h | 211 | MFR_DEVSET2 | RW | 2 | 03A6h | VRATE[1:0] | HICCUP_EN | RSVD | RSVD | RSVD | SFT_START[1:0] | 0 | 0 | 0 | 0 | 0 | 万向镜[2:0] | ||||
RW = 读写,RO = 只读,WO = 只写,BLK = 块读取。VBOOT[1:0] MFR_DEVSET1中的值为 由外部电容器(C_SELA)编程,等于二进制值00b,此处表示V靴子= 0.65V。
配置MAX20734地址
MAX20734 PMBus地址通过R_SELA设置。可以有八个唯一地址,如图所示 在表 8 中。
表 8.MAX20734 PMBus地址字节
| PMBus 地址 (PMAD) | 常量/变量 |
|---|---|
| (6)(MSB) | 常量 = 1 |
| (5) | 常量 = 0 |
| (4) | 常量 = 1 |
| (3) | 常量 = 0 |
| (2) | R_SELA_bit2 |
| (1) | R_SELA_bit1 |
| (0) | R_SELA_bit0 |
状态报告
MAX20734支持图1所示的状态寄存器。使用 CLEAR_FAULTS 命令 以清除已设置的任何故障位,并清除器件的SMALERT引脚输出。 CLEAR_FAULTS命令不会导致因故障情况而锁定的设备重新启动。要在锁存故障后重新启动,必须重新通电。如果重新通电后故障仍然存在,则再次设置故障位。
STATUS_BYTE包含最重要的故障和警告。STATUS_WORD包含两个 字节的信息。STATUS_WORD的低字节与STATUS_BYTE相同,并且 高字节包含有关设备状态的其他信息。
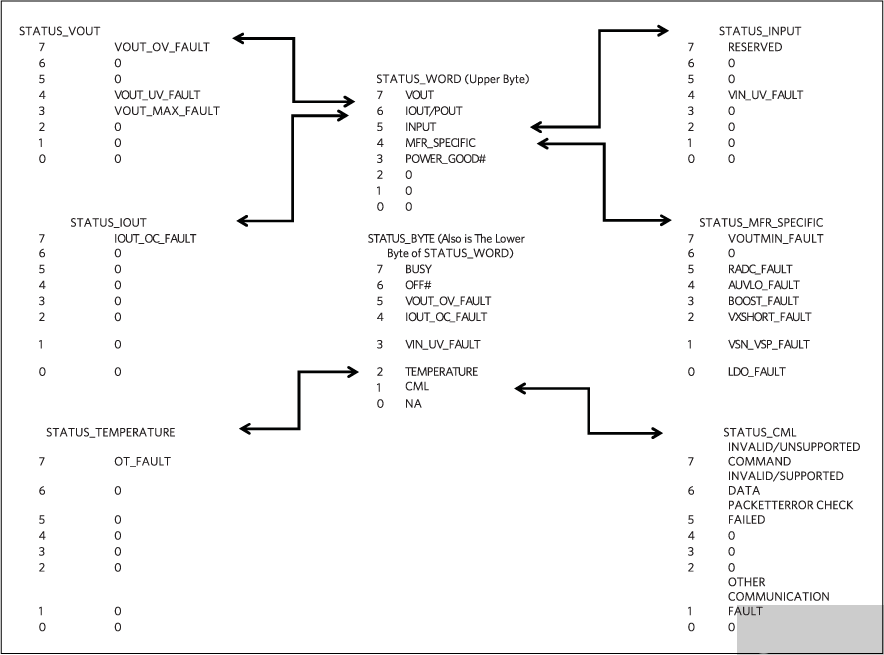
图1.状态寄存器摘要。
表 9.STATUS_WORD
| 字节 | 位号 | 状态位名称 | 意义 |
|---|---|---|---|
| 低 | 7 | BUSY | 断言故障是因为设备繁忙且无法响应。 |
| 6 | 关闭# | 如果单元未向输出供电,则断位,无论原因如何,包括未启用。 | |
| 5 | VOUT_OV_FAULT | 发生输出过压故障。 | |
| 4 | IOUT_OC_FAULT | 发生输出过流故障。 | |
| 3 | VIN_UV_FAULT | 发生输入欠压故障。 | |
| 2 | 温度 | 发生了温度故障。 | |
| 1 |
CML |
发生通信、内存或逻辑故障。 | |
| 0 | 不适用 | 不适用 | |
| 高 | 7 | VOUT | 发生输出电压故障。 |
| 6 | IOUT/POUT | 发生输出电流故障。 | |
| 5 | 输入 | 发生输入电压、输入电流或输入电源故障。 | |
| 4 | MFR_SPECIFIC | 发生了制造商特定的故障或警告。 | |
| 3 | POWER_GOOD# | 如果设置了此位,则电源不好。 | |
| 2 | 不适用 | 不适用 | |
| 1 | 不适用 | 不适用 | |
| 0 | 不适用 | 不适用 |
控制
操作/开和关配置
OPERATION 命令用于在 OE 引脚为低电平的情况下打开 (0x80h) 和关闭 (0x0h),因为 由固定为 0x1Fh 的ON_OFF_CONFIG确定。
输出电压控制
以下寄存器用于与输出电压相关的配置设置。所有 格式处于线性模式,N = -9,在 V 中表示外模式寄存器 (Reg_20h) 值为 0x17h。输出电压命令(Reg_21h)和其他输出电压相关命令 是一个 2 位无符号变量。输出电压公式如下:
| (公式1) |

| (公式2) |

| (公式3) |
配置寄存器
PGMA 和 PGMB 配置电阻器和电容器用于配置 PMBus 地址, 软启动时序、启动电压过流保护限值、内部增益设置和 频率。有两个PMBus寄存器,MFR_DEVSET1和MFR_DEVSET2,可用于检查 并覆盖这些设置。可以通过这两个更改的其他系统参数 配置寄存器包括电源良好延迟时序、过热调节 保护限值、输出电压命令斜坡速率和过流保护模式。这 重新通电后,覆盖参数将恢复为默认值。
表 10.PGMA (R_SELA)
| 不。 | 电阻 (千分电阻) | SS 时间(毫秒) | 私有地址 (1010_XXXX) |
|---|---|---|---|
| 1 | 1.78 | 3 | PMBus 从地址 1010 000b |
| 2 | 2.67 | 3 | PMBus 从地址 1010 001b |
| 3 | 4.02 | 3 | PMBus 从地址 1010 010b |
| 4 | 6.04 | 3 | PMBus 从地址 1010 011b |
| 5 | 9.09 | 3 | PMBus 从地址 1010 100b |
| 6 | 13.3 | 3 | PMBus 从地址 1010 101b |
| 7 | 20 | 3 | PMBus 从地址 1010 110b |
| 8 | 30.9 | 3 | PMBus 从地址 1010 111b |
| 9 | 46.4 | 1.5 | PMBus 从地址 1010 000b |
| 10 | 71.5 | 1.5 | PMBus 从地址 1010 001b |
| 11 | 107 | 1.5 | PMBus 从地址 1010 010b |
| 12 | 162 | 1.5 | PMBus 从地址 1010 011b |
MFR_DEVSET2(Reg_D3h(位1:0))用于对软启动时序进行编程,如表11所示。
表 11.软启动时序
| SFT-开始[1:0] | 软启动时间(毫秒) |
|---|---|
| 00b | 0.75 |
| 01b | 1.5 |
| 10b | 3 |
| 11b | 6 |
MFR_DEVSET1(Reg_D2h(位9:8))用于读取引导电压,如表12所示。
表 12.启动电压
| V靴子[1:0] | V靴子电压 (V) |
|---|---|
| 00b | 0.6484 |
| 01b | 0.8984 |
| 10b | 1.0 |
| 11b | 不适用 |
其他系统参数
过流保护
过流保护MFR_DEVSET1(Reg_D2h(位 6:5))用于设置正负 过流起始和箝位电平如表13所示。
表 13.OCP 设置
| OCP[1:0] | OCP 设置 |
|---|---|
| 00b | 设置 0 |
| 01b | 设置 1 |
| 10b | 设置 2 |
| 11b | 设置 3 |
温度控制
MFR_DEVSET1(Reg_D2h(位 12:11))用于对过热触发电平进行编程,如图所示 在表 14 中。
表 14.过热关断限制
| 一次性密码[1:0] | 过温(°C) |
|---|---|
| 00b | 150 |
| 01b | 130 |
| 10b | 不适用 |
| 11b | 不适用 |
内部增益设置
MFR_DEVSET1(Reg_D2h(位14:13))用于对内部增益设置进行编程,如表15所示。
表 15.内部增益设置
| R获得[1:0] | R获得(毫欧姆) |
|---|---|
| 00b | 0.8 |
| 01b | 3.2 |
| 10b | 1.6 |
| 11b | 6.4 |
启动电压至输出电压命令斜坡速率
MFR_DEVSET2(Reg_D3h(位 7:6))用于将引导电压编程为输出电压命令 斜坡速率如表16所示。
表 16.输出电压斜坡率
| V率[1:0] | V率(毫伏/微秒) |
|---|---|
| 00b | 4 |
| 01b | 2 |
| 10b | 1 |
| 11b | 不适用 |
频率
MFR_DEVSET1(Reg_D2h(位4:2))用于设置开关频率,如表17所示。
表 17.频率寄存器
| FSW[2:0 ] | 频率(千赫) |
|---|---|
| 000b | 400 |
| 001b | 500 |
| 010B/011B | 600 |
| 100b | 700 |
| 101b | 800 |
| 110B/111B | 900 |
调节电源良好延迟时序
MFR_DEVSET1(Reg_D2h(位2:1))用于对tSTAT时间进行编程,如表18所示。
表 18.t统计注册
| 统计 [1:0] | 统计时间 (μs) |
|---|---|
| 00b | 2000 |
| 01b | 125 |
| 10b | 62.5 |
| 11b | 32 |
输出电流过流模式
MFR_DEVSET2(Reg_D3h(位5))用于对输出电流过流模式进行编程,如表19所示。
表 19.过流保护模式
| 代码(二进制) | OCP 模式 |
|---|---|
| 0b | 恒流 |
| 1b | 呃逆 |
读取遥测数据
MAX20734提供结温、输出电流、输入电压和 检测引脚上的电压。使用直接反馈时,检测引脚上的电压等于V外. 当反馈中有一个分压器时,检测引脚上的电压按分压比成比例。
读取输出电流
阅读 IOUT返回以安培为单位的输出电流。数据采用 PMBus DIRECT 格式,R = -1, 以及 m 和 b,定义如下。

| (公式4) |
其中: m = 111 – 3.4 x D b = 3461 - 114 x D
D = V外/V在
a = 0.013
TJ= 结温读数(单位:°C)
读取温度
读取温度返回结温(以°C为单位)。 数据采用 PMBus 直接格式,带有 m = 21,b = 5887,R = -1。

| (公式5) |
读取输出电压
读取 V外返回以伏特为单位的输出电压。数据采用 PMBus 线性格式,N = -9。
| READ VOUT = REG_8Bh (BITS 9:0) × 2N (VOLTS) | (公式6) |
读取输入电压
读取 V在返回以伏特为单位的输入电压。数据采用 PMBus 直接格式,m = 3592, b = 0,R = -2。

| (公式7) |
ARA READ/PMBus Alert
MAX20734支持SMBus 2.0中描述的报警响应地址(ARA)协议。 规范。有关更多详细信息,请参阅 SMBus 2.0 规范附录 A。
PMBus 警报引脚
MAX20734 SMALERT引脚支持SMBus 2.0规范中描述的SMBALERT#信号。故障 断言警报线为低的条件如下:
任何不同于 0 且未被命令屏蔽SMBALERT_MASK位在 STATUS_CML 中拉出低 SMALERT 引脚。
任何不同于 0 且未被命令屏蔽SMBALERT_MASK STATUS_VOUT中拉低 SMALERT 引脚的位。
任何不同于 0 且未被命令屏蔽SMBALERT_MASK位在STATUS_IOUT中拉低 SMALERT 引脚。
任何不同于 0 且未被命令屏蔽SMBALERT_MASK位都会在 STATUS_TEMPERATURE 中拉出低 SMALERT 引脚。
任何不同于 0 且未被命令屏蔽SMBALERT_MASK位在 STATUS_MFR_SPECIFIC 中拉低 SMALERT 引脚。
任何不同于 0 且未被命令屏蔽SMBALERT_MASK的位都会在 STATUS_INPUT 中拉出低 SMALERT 引脚。
PMBus 消息的持续时间比预期的要长。
SMBALERT_MASK用于防止警告或故障情况触发SMALERT引脚。命令 用于阻止状态位或位导致SMALERT引脚置位的格式(写字)如表20所示。掩码字节中的位与相应状态寄存器中的位对齐。
表 20.SMBALERT_MASK命令数据包格式
| # 位 | 1 | 7 | 1 | 1 | 8 | 1 | 8 | 1 | 8 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| S | PMBus地址 | W | S-ACK | SMBALERT_MASK命令代码 | S-ACK | Status_x命令代码 | S-ACK | 掩码字节 | S-ACK | P |
释放SMALERT引脚的两种方法如下:
CLEAR_FAULTS命令
ARA (参考 SMBus 规范 2.0)
审核编辑:郭婷
-
深入解析MAX20730:集成式降压开关稳压器的卓越之选2026-03-16 462
-
MAX20734:集成式降压开关稳压器的卓越之选2026-03-06 340
-
MAX20815:集成式降压开关稳压器的卓越之选2026-03-02 393
-
什么是开关稳压器?开关稳压器的控制方式2023-09-25 2502
-
适用于Xilinx Ultrascale+ FPGA的PMBus稳压器参考设计2023-09-13 619
-
MAX20734EPL+T - (Maxim Integrated) - PMIC - 稳压器 - DC DC 开关稳压器2023-07-10 242
-
用于控制和监视MAX20743/MAX20730开关稳压器的PMBus协议2023-02-17 2160
-
用于控制和监测 MAX20734 开关稳压器的 PMBus 协议2022-11-17 254
-
开关稳压器的基础2018-11-30 2928
-
线性稳压器与开关稳压器的联系和区别2018-10-09 3907
-
线性稳压器与开关稳压器有什么不同2018-09-29 4913
-
开关稳压器,开关稳压器原理是什么?2010-03-23 7194
全部0条评论

快来发表一下你的评论吧 !
